provides an estimate of the peak linear response of a structure to
dynamic motion provided in the form of a displacement, velocity, or
acceleration spectrum;
is typically used to analyze response to a seismic event;
assumes that the system's response is linear so that it can be
analyzed in the frequency domain using its natural modes, which must be
extracted in a previous eigenfrequency extraction step (Natural Frequency Extraction);
is a linear perturbation procedure and is, therefore, not appropriate
if the excitation is so severe that nonlinear effects in the system are
important.
Response spectrum analysis can be used to estimate the peak response
(displacement, stress, etc.) of a structure to a particular base motion or
force. The method is only approximate, but it is often a useful, inexpensive
method for preliminary design studies.
The response spectrum procedure is based on using a subset of the modes of
the system, which must first be extracted by using the eigenfrequency
extraction procedure. The modes will include eigenmodes and, if activated in
the eigenfrequency extraction step, residual modes. The number of modes
extracted must be sufficient to model the dynamic response of the system
adequately, which is a matter of judgment on your part.
If the number of eigenmodes included in the superposition does not
sufficiently represent the total mass of the structure, you can use the missing
mass method to augment the missing inertia in the dynamic response as described
in
Using the Missing Mass Method.
In cases with repeated eigenvalues and eigenvectors, the modal summation
results must be interpreted with care. You should use mode combination rules
that are appropriate for closely spaced modes.
While the response in the response spectrum procedure is for linear
vibrations, the prior response may be nonlinear. Initial stress effects (stress
stiffening) will be included in the response spectrum analysis if nonlinear
geometric effects (General and Perturbation Procedures)
were included in a general analysis step prior to the eigenfrequency extraction
step.
The problem to be solved can be stated as follows: given a set of base
motions,
(),
specified in orthogonal directions defined by direction cosines
(),
estimate the peak value over all time of the response of any variable in a
finite element model that is simultaneously subjected to these multiple base
motions. The peak response is first computed independently for each direction
of excitation for each natural mode of the system as a function of frequency
and damping. These independent responses are then combined to create an
estimate of the actual peak response of any variable chosen for output, as a
function of frequency and damping.
The acceleration history (base motion) is not given directly in a response
spectrum analysis; it must first be converted into a spectrum.
Specifying a Spectrum
The response spectrum method is based on first finding the peak response to
each base motion excitation of a one degree of freedom system that has a
natural frequency equal to the frequency of interest. The single degree of
freedom system is characterized by its undamped natural frequency,
,
and the fraction of critical damping present in the system,
,
at each mode .
The equations of motion of the system are integrated through time to find peak
values of relative displacement, relative velocity, and relative or absolute
acceleration for the linear, one degree of freedom system. This process is
repeated for all frequency and damping values in the range of interest. Plots
of these responses are known as displacement, velocity, and acceleration
spectra: ,
,
and .
The response spectrum can be obtained directly from measured data, as described
in
Defining a Spectrum Using Values of S as a Function of Frequency and Damping
below. You can also use a Fortran program to define a spectrum; an example of
defining a spectrum from an acceleration record in this way is provided in
Analysis of a cantilever subject to earthquake motion.
Alternatively, you can create the required spectrum by specifying an
amplitude (time history record), the frequency range, and the damping values
for which the spectrum will be built, as described in
Creating a Spectrum from a Given Time History Record
below. The spectrum can be used in the subsequent response spectrum analysis,
or it can be written to a file for future use.
For each damping value the magnitude of the response spectrum must be given
over the entire range of frequencies needed, in ascending value of frequency.
Abaqus/Standard
interpolates linearly between the values given on a log-log scale. Outside the
extremes of the frequency range given, the magnitude is assumed to be constant,
corresponding to the end value given. (See
Material Data Definition
for an explanation of data interpolation.)
Any number of spectra can be defined, and each spectrum must be named. The
response spectrum procedure allows up to three spectra to be applied
simultaneously to the model in orthogonal physical directions defined by their
direction cosines.
Defining a Spectrum Using Values of S as a Function of Frequency and Damping
You can define a spectrum by specifying values for the magnitude of the
spectrum; frequency, in cycles per time, at which the magnitude is used; and
associated damping, given as a ratio of critical damping.
Specifying the Type of Spectrum
You can indicate whether a displacement, velocity, or acceleration
spectrum is given. The default is an acceleration spectrum.
Alternatively, an acceleration spectrum can be given in
g-units. In this case you must also specify the
value of the acceleration of gravity.
Reading the Data Defining the Spectrum from an Alternate Input File
The data for the spectrum can be specified in an alternate input file and
read into the
Abaqus/Standard
input file.
Creating a Spectrum from a Given Time History Record
If you have a time history of a dynamic event (e.g., acceleration, velocity,
displacement), you can build your own spectrum by specifying the record type
and the amplitude name that this record represents. If the amplitude record is
given with an arbitrarily changing time increment, linear interpolation will be
needed for the implicit integration scheme for the dynamic equation of motion
for a single degree of freedom system subjected to this record. You can specify
the frequency range for the integration scheme and the frequency increment. You
can build a spectrum for every fraction of critical damping indicated in the
list of damping values.
Specifying the Type of Spectrum to Be Created
You can indicate whether a displacement, velocity, or acceleration
spectrum is to be created. The default is an acceleration spectrum.
Alternatively, an acceleration spectrum can be created in
g-units. In this case you must also specify the
value of the acceleration of gravity.
Specifying the Record Type That the Time History Represents
You can indicate whether a displacement, velocity, or acceleration
amplitude is specified. The default is an acceleration amplitude.
Alternatively, an acceleration amplitude can be given in
g-units. In this case you must also specify the
value of the acceleration of gravity.
Creating an Absolute or Relative Acceleration Spectrum
When you create an acceleration spectrum from a given time history record,
you can create an absolute or relative response spectrum. The default is an
absolute spectrum.
Generating the List of Damping Values for the Fraction of Critical Damping
You must provide a list of damping values for the fraction of critical
damping to create a spectrum. However, if the damping is evenly spaced between
its lower and upper bound, you can automatically generate the list of damping
values by providing the start value, end value, and increment for the fraction
of critical damping.
Writing the Generated Spectra to an Independent File
You can write the generated spectra to an independent file. Otherwise, the
generated spectra can be used only within the currently submitted job in
subsequent response spectra procedures. You can inspect the generated spectra
if you request that model definition data be printed to the data file (see
Model and History Definition Summaries).
Estimating the Peak Values of the Modal Responses
Since the response spectrum procedure uses modal methods to define a model's
response, the value of any physical variable is defined from the amplitudes of
the modal responses (the “generalized coordinates”), .
The first stage in the response spectrum procedure is to estimate the peak
values of these modal responses. For mode
and spectrum k this is
where
is the modal amplitude for mode ;
is a scaling parameter introduced as part of the response spectrum procedure
definition for spectrum ;
is the user-defined value of the spectrum (see
Specifying a Spectrum)
in direction k interpolated, if necessary, at natural
frequency
and the fraction of critical damping
in mode ;
is the jth direction cosine for the
kth spectrum; and
Similar expressions for
and
can be obtained by substituting velocity or acceleration spectra in the above
equation.
Combining the Individual Peak Responses
The individual peak responses to the excitations in different directions
will occur at different times and, therefore, must be combined into an overall
peak response. Two combinations must be performed, and both introduce
approximations into the results:
The multidirectional excitations must be combined into one overall
response. This combination is controlled by the directional summation method,
as described below in
Directional Summation Methods.
The peak modal responses must be combined to estimate the peak physical
response. This combination is controlled by the modal summation method, as
described below in
Modal Summation Methods.
Depending on the type of base excitation, either modal responses or
directional responses are combined first.
Directional Summation Methods
You choose the method for combining the multidirectional excitations
depending on the nature of the excitations.
The Algebraic Method
If the input spectra in the different directions are components of a base
excitation that is approximately in a single direction in space, then for each
mode the peak responses in the different spatial directions are summed
algebraically by
After this summation is performed, the modal responses are summed.
(Choosing the method used for modal summation is described below in
Modal Summation Methods.)
Since the directional components are summed first, the subscript
k is not relevant and can be ignored in the modal
summation equations that follow.
The Square Root of the Sum of the Squares Directional Summation Method
If the spectra in different directions represent independent excitations,
the modal summation is performed first, as explained below in
Modal Summation Methods.
Then, the estimates of the total peak response in each excitation direction
are combined by
The Forty-Percent Method
If the spectra in different directions represent independent excitations,
the modal summation is performed first, as explained below in
Modal Summation Methods.
Then, the responses in different excitation directions are combined by the 40%
rule recommended by the ASCE 4–98 standard for
Seismic Analysis of Safety-Related Nuclear Structures and Commentary, Section
3.2.7.1.2. This method combines the response for all possible combinations of
the three components, including variations in sign (plus/minus), assuming that
when the maximum response from one component occurs, the response from the
other two components is 40% of their maximum value, using one of the following:
The Thirty-Percent Method
If the spectra in different directions represent independent excitations,
the modal summation is performed first, as explained below in
Modal Summation Methods.
Then, the responses in different excitation directions are combined by the 30%
rule recommended by the ASCE 4–98 standard for
Seismic Analysis of Safety-Related Nuclear Structures and Commentary, Section
3.2.7.1.2. This method combines the response for all possible combinations of
the three components, including variations in sign (plus/minus), assuming that
when the maximum response from one component occurs, the response from the
other two components is 30% of their maximum value, using one of the following:
Modal Summation Methods
The peak response of some physical variable
(a component i of displacement, stress, section
force, reaction force, etc.) caused by the motion in the
th
natural mode excited by the given response spectra in direction
k at frequency
with damping
is given by
where
is the ith component of mode
,
and there is no sum on .
(In the case of algebraic summation the subscript k is not
relevant and can be ignored in this equation and in those that follow.)
There are several methods for combining these peak physical responses in the
individual modes, ,
into estimates of the total peak response, .
Most of the methods implemented in
Abaqus/Standard
follow the ASCE 4–98 standard for Seismic
Analysis of Safety Related Nuclear Structures and Commentary. The updated
documents, “Reevaluation of Regulatory Guidance on Modal Response Combination
Methods for Seismic Response Spectrum Analysis” issued in 1999
(NUREG/CR-6645, BNL-NUREG-52276) and “Draft
Regulatory Guide” (DG-1127) issued in 2005
contain new recommendations. You are advised to read the new recommendations
before choosing a modal summation method from among those described below.
The Absolute Value Method
The absolute value method is the most conservative method for combining
the modal responses. It is obtained by summing the absolute values resulting
from each mode:
This method implies that all of the responses peak simultaneously. It will
overpredict the peak response of most systems; therefore, it may be too
conservative to help in design.
The Square Root of the Sum of the Squares Modal Summation Method
The square root of the sum of the squares method is less conservative than
the absolute value method. It is also usually more accurate if the natural
frequencies of the system are well separated. It uses the square root of the
sum of the squares to combine the modal responses:
The Naval Research Laboratory Method
The absolute value and square root of the sum of the squares methods can
be combined to yield the Naval Research Laboratory method. It distinguishes the
mode, ,
in which the physical variable has its maximum response and adds the square
root of the sum of squares of the peak responses in all other modes to the
absolute value of the peak response of that mode. This method gives the
estimate:
The Ten-Percent Method
The ten-percent method recommended by Regulatory Guide 1.92 (1976) is no
longer recommended according to the “Reevaluation of Regulatory Guidance on
Modal Response Combination Methods for Seismic Response Spectrum Analysis”
document issued in 1999. It is retained here because of its extensive prior
use. The ten-percent method modifies the square root of the sum of the squares
method by adding a contribution from all pairs of modes
and
whose frequencies are within 10% of each other, giving the estimate:
The frequencies of modes
and
are considered to be within 10% of each other whenever
The ten-percent method reduces to the square root of the sum of the
squares method if the modes are well separated with no coupling between them.
The Complete Quadratic Combination Method
Like the ten-percent method, the complete quadratic combination method
improves the estimation for structures with closely spaced eigenvalues. The
complete quadratic combination method combines the modal response with the
formula
where
are cross-correlation coefficients between modes
and ,
which depend on the ratio of frequencies and modal damping between the two
modes:
where .
If the modes are well spaced, their cross-correlation coefficient will be
small ()
and the method will give the same results as the square root of the sum of the
squares method.
This method is usually recommended for asymmetrical building systems
since, in such cases, other methods can underestimate the response in the
direction of motion and overestimate the response in the transverse direction.
The Grouping Method
This method, also known as the NRC
grouping method, improves the response estimation for structures with closely
spaced eigenvalues. The modal responses are grouped such that the lowest and
highest frequency modes in a group are within 10% and no mode is in more than
one group. The modal responses are summed absolutely within groups before
performing a SRSS combination of the groups. Within the group responses are
summed as
for “n” frequencies within any “gr” group and then performing
The above expression includes all the groups; in addition, the group can
consist of just one frequency response if this frequency does not have another
member that is within the 10% limit.
The ten-percent method will always produce results higher in value than
the grouping method.
Double Sum Combination
This method, also known as Rosenblueth's double sum combination (Rosenblueth
and Elorduy, 1969), is the first attempt to evaluate modal correlation
based on random vibration theory. It utilizes the time duration
of strong earthquake motion. The mode correlation coefficients
,
which depend also on the frequencies and damping coefficient
,
lead to the following mode combination:
where
where
Separation of Modal Responses into Periodic and Rigid Responses
Each spectrum can be divided into low-, medium-, and high-frequency
regions. In the low-frequency region the modes are usually uncorrelated. In the
mid-range they are partially correlated, and in the high-frequency region they
tend to be correlated with the input data and, hence, between themselves. Each
of these regions may, therefore, require special consideration. These
considerations are addressed by the Gupta and Lindley-Yow methods.
We divide the modal response into two parts: the rigid part and the damped
periodic part. It is assumed that the rigid part and the damped periodic part
are statistically independent. Let us define the rigid response coefficient for
each mode by ,
the rigid response by ,
and the periodic response by .
Therefore, the relationship between both regions becomes:
which is equivalent to summing both regions according to the
SRSS rule. The value of the rigid response
coefficient is chosen depending on the method used. For the Gupta method this
coefficient is estimated based on two user-specified frequencies:
defining the beginning of the periodic region, and
defining the beginning of the rigid region (which is often equivalent to the
frequency associated with zero period acceleration). For the current frequency
,
this expression for the Gupta method is
For the Lindley-Yow method this coefficient is equal to
where ZPA denotes the zero period acceleration for the user-specified frequency value and denotes the acceleration spectrum for mode . The Lindley-Yow method does not work well for the region of frequencies
on the low-frequency end of the spectrum. Therefore, we set the coefficient for all modes below the frequency of the peak acceleration value for this
spectrum.
The rigid response method works with only two modal summation rules: CQC and DSC with their respective definitions for the mode correlation
coefficients .
By default, no rigid response is included. To include a rigid response, you
must specify the rigid response method.
Selecting the Modes and Specifying Damping
You can select the modes to be used in modal superposition and specify
damping values for all selected modes.
Selecting the Modes
You can select modes by specifying the mode numbers individually, by
requesting that
Abaqus/Standard
generate the mode numbers automatically, or by requesting the modes that belong
to specified frequency ranges. If you do not select the modes, all modes
extracted in the prior eigenfrequency extraction step, including residual modes
if they were activated, are used in the modal superposition.
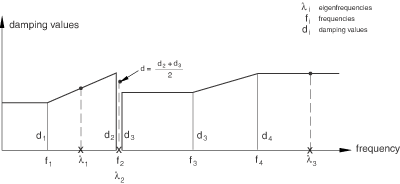
Specifying Damping
Damping is almost always specified for a mode-based procedure; see
Material Damping.
You can define a damping coefficient for all or some of the modes used in the
response calculation. The damping coefficient can be given for a specified mode
number or for a specified frequency range. When damping is defined by
specifying a frequency range, the damping coefficient for an mode is
interpolated linearly between the specified frequencies. The frequency range
can be discontinuous; the average damping value will be applied for an
eigenfrequency at a discontinuity. The damping coefficients are assumed to be
constant outside the range of specified frequencies.
Example of Specifying Damping
Figure 1
illustrates how the damping coefficients at different eigenfrequencies are
determined for the following input:
Rules for Selecting Modes and Specifying Damping Coefficients
The following rules apply for selecting modes and specifying modal damping
coefficients:
No modal damping is included by default.
Mode selection and modal damping must be specified in the same way,
using either mode numbers or a frequency range.
If you do not select any modes, all modes extracted in the prior
frequency analysis, including residual modes if they were activated, will be
used in the superposition.
If you do not specify damping coefficients for modes that you have
selected, zero damping values will be used for these modes.
Damping is applied only to the modes that are selected.
Damping coefficients for selected modes that are beyond the specified
frequency range are constant and equal to the damping coefficient specified for
the first or the last frequency (depending which one is closer). This is
consistent with the way
Abaqus
interprets amplitude definitions.
Using the Missing Mass Method
You can use the missing mass method to augment the missing inertia in the
dynamic response when the number of eigenmodes included in the superposition
does not sufficiently represent the total mass of the structure. The missing
inertia is due primarily to the truncated higher frequency modes that belong to
the in-phase (rigid) response. Quasistatic residual modes in the direction of
applied spectra can be substituted for these truncated modes. This technique is
most suitable for use with the response spectra summations that split the
frequency range into periodic and rigid phases, such as the Gupta or
Lindley-Yow methods. However, any modal summation method can be used with the
missing mass method. The missing mass method results in better response
accuracy and is explained in three small spring-mass examples introduced first
in the paper by Dhileep (Dhileep and Bose, 2008). The residual vector
representing missing energy is found by a simple inertia balance in eigenspace:
where
represents the stiffness of the
model,
represents the mass of the
model,
and
represent the
out of
eigenvectors and participation factors,
is the unit base displacement in
the direction of the earthquake spectrum,
is a ground acceleration, and
is a pseudostatic residual mode
representing the response of the remaining modes beyond the mode
.
Initial Conditions
It is not appropriate to specify initial conditions in a response spectrum
analysis.
Boundary Conditions
All points constrained by boundary conditions and the ground nodes of
connector elements are assumed to move in phase in any one direction. This base
motion can use a different input spectrum in each of three orthogonal
directions (two directions in a two-dimensional model). You define the input
spectra, ,
as functions of frequency, ,
for different values of critical damping, ,
as described earlier in
Specifying a Spectrum.
Secondary bases cannot be used in a response spectrum analysis.
Loads
The only “loading” that can be defined in a response spectrum analysis is
that defined by the input spectra, as described earlier. No other loads can be
prescribed in a response spectrum analysis.
Predefined Fields
Predefined fields, including temperature, cannot be used in response
spectrum analysis.
Material Options
The density of the material must be defined (Density).
The following material properties are not active during a response spectrum
analysis: plasticity and other inelastic effects, rate-dependent material
properties, thermal properties, mass diffusion properties, electrical
properties, and pore fluid flow properties—see
General and Perturbation Procedures.
Elements
Other than generalized axisymmetric elements with twist, any of the
stress/displacement elements in
Abaqus/Standard
can be used in a response spectrum analysis—see
Choosing the Appropriate Element for an Analysis Type.
Output
All the output variables in
Abaqus/Standard
are listed in
Abaqus/Standard Output Variable Identifiers.
The value of an output variable such as strain, E; stress, S; or displacement,
U, is its peak magnitude.
In addition to the usual output variables available, the following modal
variables are available for response spectrum analysis and can be output to the
data and/or results files (see
Output to the Data and Results Files):
GU
Generalized displacements for all modes.
GV
Generalized velocities for all modes.
GA
Generalized accelerations for all modes.
SNE
Elastic strain energy for the entire model per each mode.
KE
Kinetic energy for the entire model per each mode.
T
External work for the entire model per each mode.
Neither element energy densities (such as the elastic strain energy density,
SENER) nor whole element energies (such as the total kinetic energy
of an element, ELKE) are available for output in response spectrum analysis.
However, whole model variables such as ALLIE (total strain energy) are available for modal-based procedures
as output to the data and/or results files (see
Output to the Data and Results Files).
Reaction force output is not supported for response spectrum analysis using
eigenmodes extracted using the default
SIM-based frequency extraction procedure with
either the AMS or Lanczos eigensolver.
Reaction force output in response spectrum analysis using eigenmodes extracted
with the non-SIM-based Lanczos eigensolver
provides directional combinations of so-called, modal reaction forces weighted
with maximal absolute values of corresponding generalized displacements.
Directional and modal combination rules used for the reaction force calculation
are the same as for other nodal output variables. Modal reaction forces are
calculated in the frequency extraction procedure. They represent static
reaction forces calculated for the normal mode shapes. Generally, they cannot
adequately represent reaction force in dynamic analysis. For models with
diagonal mass and diagonal damping matrices the superposition of the modal
reaction forces can provide a reasonable approximation of a nodal reaction
force in mode-based analyses other than response spectrum analysis. In response
spectrum analysis the model response can be better represented by requesting
section stresses and section forces in structural elements containing supported
nodes.
Input File Template
HEADING
…
BOUNDARYData lines to define points to be excited by the base motion controlled by the input spectraSPECTRUM, NAME=name1, TYPE=typeData lines to define spectrum “name1” as a function of frequency, , and
fraction of critical damping, SPECTRUM, NAME=name2, TYPE=typeData lines to define spectrum “name2” as a function of frequency, , and
fraction of critical damping,
**
STEPFREQUENCYData line to specify number of modes to be extractedEND STEP
**
STEPRESPONSE SPECTRUM, COMP=comp, SUM=sumData lines referring to response spectra and defining direction cosinesSELECT EIGENMODESData lines to define the applicable mode rangesMODAL DAMPINGData lines to define modal dampingEND STEP
References
Dhileep, M., and P. R. Bose, “A
Comparative Study of "Missing Mass" Correction Methods for Response Spectrum
Method of Seismic Analysis,” Computers and
Structures, vol. 86, pp. 2087–2094, 2008.
Rosenblueth, E., and J. Elorduy, “Response
of Linear Systems to Certain Transient
Disturbances,” Proceedings of the Fourth
World Conference on Earthquake Engineering, Santiago,
Chile, 1969.