Smoothed particle hydrodynamics (SPH) is a
numerical method that is part of the larger family of meshless (or mesh-free) methods.
For these methods you do not define nodes and elements as you would normally define
in a finite element analysis; instead, only a collection of points are necessary to represent a
given body. In smoothed particle hydrodynamics these nodes are commonly referred to as particles
or pseudo-particles.
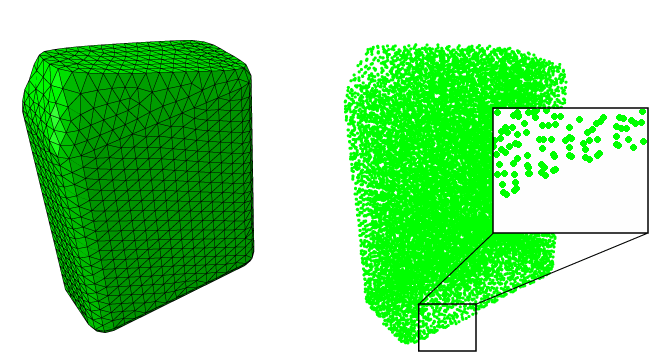
The example shown in
Figure 1
contrasts the two approaches. Both discrete representations model the initial
configuration of a body of fluid inside a bottle, as described in detail in
Impact of a water-filled bottle.
The model on the left is a traditional tetrahedron mesh of the volume occupied
by the fluid. On the right, the same volume is represented by a collection of
discrete points. Note that in the latter case there are no edges connecting the
points as these points (pseudo-particles) do not require the definition of
multiple-node element connectivity, as is the case in the traditional finite
element representation on the left. An alternative to directly defining
particle elements is to define conventional continuum finite elements and
automatically convert them to particle elements at the beginning of the
analysis or during the analysis, as discussed in
Finite Element Conversion to SPH Particles.
Finite element mesh and SPH particle
distribution.
Smoothed particle hydrodynamics is a fully Lagrangian modeling scheme
permitting the discretization of a prescribed set of continuum equations by
interpolating the properties directly at a discrete set of points distributed
over the solution domain without the need to define a spatial mesh. The
method's Lagrangian nature, associated with the absence of a fixed mesh, is its
main strength. Difficulties associated with fluid flow and structural problems
involving large deformations and free surfaces are resolved in a relatively
natural way.
At its core, the method is not based on discrete particles (spheres)
colliding with each other in compression or exhibiting cohesive-like behavior
in tension as the word particle might suggest. Rather, it is simply a clever
discretization method of continuum partial differential equations. In that
respect, smoothed particle hydrodynamics is quite similar to the finite element
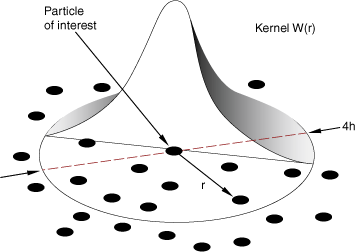
method. SPH uses an evolving interpolation
scheme to approximate a field variable at any point in a domain. The value of a
variable at a particle of interest can be approximated by summing the
contributions from a set of neighboring particles, denoted by subscript
j, for which the “kernel” function,
W, is not zero
An example kernel function is shown in
Figure 2.
The smoothing length, h, determines how many particles
influence the interpolation for a particular point.
Kernel function.
The SPH method has received substantial
theoretical support since its inception (Gingold
and Monaghan, 1977), and the number of publications related to the
method is now very large. A number of references are listed below.
The method can use any of the materials available in
Abaqus/Explicit
(including user materials). You can specify initial conditions and boundary
conditions as for any other Lagrangian model. Contact interactions with other
Lagrangian bodies are also allowed, thus expanding the range of applications
for which this method can be used.
The method is less accurate in general than Lagrangian finite element
analyses when the deformation is not too severe and than coupled
Eulerian-Lagrangian analyses in higher deformation regimes. If a large
percentage of all nodes in the model are associated with smoothed particle
hydrodynamics, the analysis may not scale well if multiple
CPUs are used.
Applications
Smoothed particle hydrodynamic analyses are effective for applications
involving extreme deformation. Fluid sloshing, wave engineering, ballistics,
spraying (as in paint spraying), gas flow, and obliteration and fragmentation
followed by secondary impacts are a few examples. There are many applications
for which both the coupled Eulerian-Lagrangian and the smoothed particle
hydrodynamic methods can be used. In many coupled Eulerian-Lagrangian analyses
the material to void ratio is small and, consequently, the computational effort
may be prohibitively high. In these cases, the smoothed particle hydrodynamic
method is preferred. For example, tracking fragments from primary impacts
through a large volume until secondary impact occurs can be very expensive in a
coupled Eulerian-Lagrangian analysis but comes at no additional cost in a
smoothed particle hydrodynamic analysis.
Impact of a water-filled bottle
includes an example of using the smoothed particle hydrodynamic method to model
the violent sloshing associated with the impact.
Artificial Viscosity
Artificial viscosity in smoothed particle hydrodynamics has the same meaning
as bulk viscosity for finite elements. Similar to other Lagrangian elements,
particle elements use linear and quadratic viscous contributions to dampen high
frequency noise from the computed response. In rare cases when the default
values are not appropriate, you can control the amount of artificial viscosity
included in a smoothed particle hydrodynamic analysis.
SPH Tensile Instability Control
The classical SPH formulation can display
a tensile instability that results in an unphysical clustering of particles.
The clustering is particularly noticeable when materials are in a tensile
stress state. To relieve the SPH tensile
instability,
Abaqus
uses the artificial stress approach of
Monaghan, 2000. In this method an artificial
stress contribution that acts as a short-range repulsion force is added to
mitigate the tensile instability. This repulsion force is used to prevent
particles from getting too close to each other. This force is related to the
inter-particle distance: the smaller the distance the greater the force. This
feature is effective only when an initially uniform distribution of particles
is used.
SPH Particle Generator
Smoothed particle hydrodynamic analysis uses the same particle generator as
used to define discrete particles (PD3D, see
Particle Generator). The
SPH-type particle generator is a tool for automatically introducing
SPH particles into the flow domain during the
course of the analysis and is needed when introducing an
SPH inflow boundary condition. To define the
SPH particle generator, you must also specify
the maximum number of particles that can be generated during the analysis. In
addition, you must define an inlet surface associated with the
SPH particle generator. If there is a
user-defined PC3D element class in the model, it must have the same material
property as the element class associated with the
SPH particle generator.
The inlet surface can be thought of as an opening through which the
particles flow into the flow domain. Similar to the PD3D particle generator, you must define an element-based surface for
the inlet surface. Care should be taken with respect to the positive surface
normal direction at the inlet because the initial particle velocity is in this
direction. All inlet surfaces associated with an
SPH particle generator must be in one plane
(that is, have the same surface normal). If there is no user-defined PC3D element set in the model, SPH
particles are generated uniformly on the inlet surfaces with the inter-particle
distance defined as two times the particle thickness. If there is a
user-defined PC3D element set in the model, SPH
particles are generated on the inlet surfaces according to the spatial location
of the user-defined SPH particles adjacent to
the inlet surfaces. In this case if there are initially no
SPH particles within a distance of two times
the particle thickness to the inlet surfaces, the particle generation will not
proceed. It is also strongly recommended to use a uniform size for the
user-defined SPH particles.
SPH Particle Outlet
An SPH particle outlet is a tool to remove
SPH particles from the flow domain
automatically when the SPH particles flow out
of the flow domain during the course of the analysis. It is needed when you
introduce an SPH outflow boundary condition.
You must define an outlet surface associated with the
SPH particle outlet. The outlet surface can be
thought of as an opening through which the particles flow out of the flow
domain. All outlet surfaces associated with an
SPH particle outlet must be in one plane (that
is, have the same surface normal).
Initial Conditions
Initial Conditions
describes all of the initial conditions that are available for an explicit
dynamic analysis. Initial conditions pertinent to mechanical analyses can be
used in a smoothed particle hydrodynamic analysis.
Boundary Conditions
Boundary conditions are defined as described in
Boundary Conditions.
The default interaction between SPH particles
and Lagrangian surfaces is based on node-to-surface contact. To improve the
SPH solution near the Lagrangian boundaries
for flow-type problems, you can define the surface behavior explicitly.
Improving the SPH Boundary Behavior near Lagrangian Boundaries
In the SPH method, particles interact with
their neighboring particles through a smoothing kernel function. The smoothing
kernel function has a finite supporting domain. To achieve accurate
SPH simulation results, there should be enough
neighboring particles (50–60) within the supporting domain of the smoothing
kernel. However, special considerations are needed near the boundaries. When
particles are close to Lagrangian boundaries, part of the supporting domain of
the smoothing kernel (that beyond the Lagrangian boundaries) will not be filled
with any SPH particles. Therefore, the
integration accuracy for those SPH particles
close to the Lagrangian boundaries may be negatively affected. In addition, the
disturbance of the solution close to the boundaries may eventually lead to
inaccurate simulation results for the whole field.
To improve the SPH solution near the
Lagrangian boundaries, you can specify surface behavior that is based on the
ghost particle method (Colagrossi
and Landrini, 1977) and define the tangential-type of
SPH boundary behavior. When
SPH particles are close to Lagrangian boundary
surfaces, a virtual plane is formed by taking the average of the adjacent
boundary surfaces; based on this virtual plane, ghost particles are created to
help improve integration accuracy. The state (pressure, density, velocity,
etc.) of the ghost particles is computed from the real physical particles. With
the improved boundary condition, SPH particles
on opposite sides of a surface do not interact with each other.
SPH Inflow Boundary Condition
You can specify velocity or natural boundary conditions on inlet surfaces
associated with an SPH particle generator.
When you specify a velocity boundary condition on an inlet surface,
SPH particles are introduced into the flow
domain through the inlet with a user-specified flow speed. The flow direction
of the particles is along the normal to the inlet facets. When you specify a
natural boundary condition on an inlet surface,
SPH particles are introduced into the flow
domain whenever the closest layer of SPH
particles to the inlet surfaces separates from the surface. The natural inflow
boundary condition is usually used with a gravity load.
SPH Outflow Boundary Condition
You can specify nonreflecting or pressure boundary conditions on outlet
surfaces associated with an SPH particle
outlet. When you specify a nonreflecting boundary condition on an outlet
surface, the pressure gradient on the outlet surface associated with an
SPH particle outlet is zero. When you specify
a pressure boundary condition on an outlet surface, the pressure on the outlet
surfaces associated with an SPH particle
outlet is the user-specified pressure.
Loads
The loading types available for an explicit dynamic analysis are explained
in
About Loads.
Concentrated nodal loads can be applied as usual. Gravity loads are the only
distributed loads allowed in a smoothed particle hydrodynamic analysis.
Any of the material models in
Abaqus/Explicit
can be used in a smoothed particle hydrodynamic analysis.
Elements
The smoothed particle hydrodynamic method is implemented via the formulation
associated with PC3D elements. These 1-node elements are simply a means of defining
particles in space that model a particular body or bodies. These particle
elements utilize existing functionality in
Abaqus
to reference element-related features such as materials, initial conditions,
distributed loads, and visualization.
You define these elements in a similar fashion as you would define point
masses. The coordinates of these points lie either on the surface or in the
interior of the body being modeled, similar to the nodes of a body meshed with
brick elements. For more accurate results, you should strive to space the nodal
coordinates of these particles as uniformly as possible in all directions.
An alternative to directly defining PC3D elements is to define conventional continuum finite element types
C3D8R, C3D6, or C3D4 and automatically convert them to particle elements at the
beginning of the analysis or during the analysis, as discussed in
Finite Element Conversion to SPH Particles.
The smoothed particle hydrodynamic method implemented in
Abaqus/Explicit
uses a cubic spline as the interpolation polynomial and is based on the
classical smoothed particle hydrodynamic theory as outlined in the references
below.
The smoothed particle hydrodynamic method is not implemented for
two-dimensional elements. Axisymmetry can be simulated using a wedge-shaped
sector and symmetry boundary conditions. There are no hourglass or distortion
control forces associated with PC3D elements. These elements do not have faces or edges associated
with them.
SPH Kernel Interpolator and Formulations
By default, the smoothed particle hydrodynamic method implemented in
Abaqus/Explicit
uses a cubic spline as the interpolation polynomial. Alternatively, you can
choose a quadratic (Johnson
et al, 1996) or quintic (Wendland,
1995) interpolator.
The implementation is based on the classical smoothed particle hydrodynamic
theory as outlined in the references below. You also have the option of using a
mean flow correction configuration update, commonly referred to in the
literature as the XSPH method (see
Monaghan,
1992), as well as the corrected kernel of
Randles
and Libersky, 1997, also referred to as the normalized
SPH (NSPH)
method. In the XSPH method, the mean velocity
filtering coefficient is required for modifying the coordinate update for the
particles. A zero value for this coefficient leads to the classical
SPH method.
There is currently no capability to automatically compute the volume
associated with these particles. Hence, you need to supply a characteristic
length that will be used to compute the particle volume, which in turn is used
to compute the mass associated with the particle. It is assumed that the nodes
are distributed uniformly in space and that each particle is associated with a
small cube centered at the particle. When stacked together, these cubes will
fill the overall volume of the body with some minor approximation at the free
surface of the body. The characteristic length is half the length of the cube
side. From a practical perspective, once you have created the nodes, you can
use the half-distance between two nodes as the characteristic length.
Alternatively, if you know the mass and density of the part, you can compute
the volume of the part and divide it by the total number of particles in the
part to obtain the volume of the small cube associated with each particle. Half
of the cubic root of this small volume is a reasonable characteristic length
for this particle set. You can check the mass of individual sets in the model
if you request that model definition data be printed to the data
(.dat) file (see
Model and History Definition Summaries).
Smoothing Length Calculation
Even though particle elements are defined in the model using one node per
element, the smoothed particle hydrodynamic method computes contributions for
each element based on neighboring particles that are within a sphere of
influence. The radius of this sphere of influence is referred to in the
literature as the smoothing length. The smoothing length is independent of the
characteristic length discussed above and governs the interpolation properties
of the method. By default, the smoothing length is computed automatically. As
the deformation progresses, particles move with respect to each other and,
hence, the neighbors of a given particle can (and typically do) change. Every
increment
Abaqus/Explicit
recomputes this local connectivity internally and computes kinematic quantities
(such as normal and shear strains, deformation gradients, etc.) based on
contributions from this cloud of particles centered at the particle of
interest. Stresses are then computed in a similar fashion as for
reduced-integration brick elements, which are in turn used to compute element
nodal forces for the particles in the cloud based on the smoothed particle
hydrodynamic formulation.
By default,
Abaqus/Explicit
computes a smoothing length at the beginning of the analysis such that the
average number of particles associated with an element is roughly between 50
and 60. The smoothing length can be kept constant or can vary during the
analysis. In both cases the average number of particles per element can either
decrease or increase during the analysis depending on whether the average
behavior in the model is expansive or compressive, respectively.
If the average number of particles per element decreases below a certain
minimum number, the deformation gradient may not be calculated accurately due
to the limited support from surrounding particles within the sphere of
influence. In this case the deformation gradient is kept constant between the
previous time increment and the current time increment. By default, the minimum
number of particles associated with one element is 5.
Since the PC3D elements are Lagrangian elements, their nodes can be involved in
other features, such as other elements, connectors, or constraints. Since these
elements do not have faces or edges, an element-based surface cannot be defined
using PC3D elements. Consequently, constraints that require element-based
surfaces (such as fasteners) cannot be defined for particles.
Interactions
Bodies modeled with particles can interact with other finite element meshed
bodies via contact. The contact interaction is the same as any contact
interaction between a node-based surface (associated with the particles) and an
element-based or analytical surface. Both general contact and contact pairs can
be used. All interaction types and formulations available for contact involving
a node-based surface are allowed, including cohesive behavior. Different
contact properties can be assigned via the usual options. By default, the
particles are not part of the general contact domain similar to other 1-node
elements (such as point masses). The default contact thickness for particles is
the same value specified as the characteristic length on the section
definition, and it is constant through the analysis. Thus, for contact
purposes, particles behave as spheres with radii equal to the radius of a
sphere inscribed in the small cube associated with the particle volume as
described above.
You should not specify a contact thickness of zero for the nodes associated
with PC3D elements or contact may not be resolved robustly. The recommended
approach is to use the default or specify a reasonable contact thickness.
Interaction between different bodies all modeled with PC3D elements is allowed. However, this interaction is meaningful only
in cases when the colliding smoothed particle hydrodynamic bodies are made of
the same fluid-like material, such as a water drop falling in a bucket
partially filled with water. In solids-related applications, such as modeling a
bullet perforating an armor plate, one of the bodies must be modeled using
regular finite elements.
Contact interactions cannot be defined between particles and Eulerian
regions.
Output
The element output available for PC3D elements includes all mechanics-related output for continuum
elements: stress; strain; energies; and the values of state, field, and
user-defined variables. The nodal output includes all output variables
generally available in
Abaqus/Explicit
analyses.
Limitations
Smoothed particle hydrodynamic analyses are subject to the following
limitations:
They are less accurate in general than Lagrangian finite element
analyses when the deformation is not too severe and the elements are not
distorted. In higher deformation regimes coupled Eulerian-Lagrangian analyses
are also generally more accurate. The smoothed particle dynamic method should
be used primarily in cases when the conventional finite element method or the
coupled Eulerian-Lagrangian method have reached their inherent limitations or
are prohibitively expensive to perform.
When the material is in a state of tensile stress, the particle motion
may become unstable leading to the so-called tensile instability. This
instability, which is strictly related to the interpolation technique of the
standard smoothed particle dynamic method, is especially noticeable when
simulating the stretched state of a solid. As a consequence, particles tend to
clump together and show fracture-like behavior.
Mass distribution in a body defined with particle elements is somewhat
different when compared to the mass distribution of the same body defined with
continuum elements, such as C3D8R elements. When particle elements are used, the volume of all
particles in that body are the same. Consequently, the nodal mass associated
with all particles in that body is the same. If the nodes are not placed in a
regular cubic arrangement, the mass distribution is somewhat inexact,
particularly at the free surface of the body being modeled.
Surface loads cannot be specified on PC3D elements. However, distributed loads, such as pressure, can be
applied to other finite element surfaces that can apply a pressure onto the
particle elements via contact interactions.
Bodies modeled with particles that were not defined using the same
section definition do not interact with each other. Hence, you cannot use
smoothed particle hydrodynamics to model the mixing of bodies with dissimilar
materials.
Selective subcycling and the contact pair algorithm are not supported.
Rough friction should not be used on surface interactions defined for
SPH particles.
User-defined PC3D elements and PC3D elements generated from a SPH
particle generator should have the same material properties.
Within a given body (part) defined via one solid section definition,
gravity loads and mass scaling cannot be specified selectively on a subset of
elements referenced by this definition. Instead, the two features must be
applied to all the elements in the element set associated with the solid
section definition.
Smoothed particle hydrodynamic computations are distributed across parallel
domains in most cases; however, they are all performed by a single domain (with
a single processor) for models with any of the following characteristics (which
will often dramatically degrade parallel scalability):
Finite element conversion to SPH
particles (see
Boundary Conditions)
after the beginning of an analysis. The parallel smoothed particle
hydrodynamics implementation supports conversion to
SPH particles only at the beginning of an
analysis (at time equal to zero).
Multiple solid sections for PC3D elements
Normalized kernel specified as a section control
Predefined field variable (including temperature) dependence of material
properties
Smoothed particle hydrodynamic analyses are subject to the following
limitations if multiple CPUs are used:
Contact output is not supported for smoothed particle hydrodynamic secondary nodes.
Element history output is not supported.
Dynamic load balancing cannot be activated.
If any SPH particles participate in
general contact, all SPH particles must be
included in the general contact definition.
At least 10,000 particles per domain is suggested to achieve good
scalability.
A significant increase in memory usage may be needed if a large number
of CPUs are used.
Input File Template
The following example illustrates a smoothed particle
hydrodynamic analysis of a bottle filled with fluid being dropped on the floor.
The plastic bottle and the floor are modeled with conventional shell elements.
The fluid is modeled via smoothed particle hydrodynamics using PC3D elements. The nodal coordinates of the particles are defined such
they are all located inside the bottle. Material property definitions are
defined as usual for both the fluid and the bottle. Contact interaction is
defined between the smoothed particle hydrodynamic particles representing the
water (node-based surface) and the interior walls of the bottle and also
between the bottle exterior and the floor using element-based surfaces (not
shown). Output is requested for stresses (pressure) and density in the
fluid.
HEADING
…
ELEMENT, TYPE=PC3D, ELSET=Fluid_Inside_The_Bottle
Element number, node number
…
SOLID SECTION, ELSET=Fluid_Inside_The_Bottle, MATERIAL=Water
Element characteristic length associated with particle volumeMATERIAL, NAME=Water
Material definition for water, such as an EOS materialELEMENT, TYPE=S4R, ELSET=Plastic_Bottle
Element definitions for the shells
**
INITIAL CONDITIONS, TYPE=VELOCITYData lines to define velocity initial conditionsNSET, NSET=Water_Nodes, ELSET=Fluid_Inside_The_Bottle
SURFACE, NAME=Water_Surface, TYPE=NODE
Water_Nodes,
SURFACE, NAME=Bottle_Interior
Plastic_Bottle, SNEG
**
STEPDYNAMIC, EXPLICITDLOADData lines to define gravity load
**
CONTACTCONTACT INCLUSIONS
Water_Surface, Bottle_Interior
**
OUTPUT, FIELDELEMENT OUTPUT, ELSET=Fluid_Inside_The_Bottle
S, DENSITY
END STEP
References
Colagrossi, A., and M. Landrini, “Numerical
Simulation of Interfacial Flows by Smoothed Particle
Hydrodynamics,” Journal of Computational
Physics, 2003.
Gingold, R.A., and J. J. Monaghan, “Smoothed
Particle Hydrodynamics: Theory and Application to Non-Spherical
Stars,” Royal Astronomical Society, Monthly
Notices, vol. 181, pp. 375–389, 1977.
Johnson, J., R. Stryk, and S. Beissel, “SPH
for High Velocity Impact
Calculations,” Computer Methods in Applied
Mechanics and
Engineering, 1996.
Libersky, L.D., and A. G. Petschek, “High
Strain Lagrangian Hydrodynamics,” Journal of
Computational
Physics, vol. 109, pp. 67–75, 1993.
Monaghan, J., “Smoothed
Particle Hydrodynamics,” Annual Review of
Astronomy and
Astrophysics, 1992.
Monaghan, J., “SPH
without a Tensile Instability,” Journal of
Computational
Physics, vol. 159, 2000.
Munjiza, A., and K. R. F. Andrews, “NBS
Contact Detection Algorithm for Bodies of Similar
Size,” International Journal for Numerical
Methods in
Engineering, vol. 43, pp. 131–149, 1998.
Randles, P.W., and L. D. Libersky, “Recent
Improvements in SPH Modeling of Hypervelocity
Impact,” International Journal of Impact
Engineering, 1997.
Swegle, J.W., and S. W. Attaway, “An
Analysis of Smoothed Particle
Hydrodynamics,” Sandia National Lab Report
SAND93–2513, 1994.
Wendland, H., “Piecewise
Polynomial, Positive Definite and Compactly Supported Radial Functions of
Minimal Degree,” Advances in Computational
Mathematics, 1995.