Overconstraints: General Remarks
In general, the term overconstraint refers to multiple constraints acting on the same degree of freedom. Overconstraints are then categorized as consistent (if all the constraints are compatible with each other) or inconsistent (if the constraints are incompatible with each other). Consistent overconstraints are also called redundant constraints, and inconsistent overconstraints are also called conflicting constraints.
In Abaqus/Standard the following types of constraints, in combination, might lead to overconstraints:
boundary conditions or base motions,
contact pairs,
coupling constraints,
mesh-independent spot welds,
multi-point constraints or linear constraint equations,
surface-based tie constraints, and
rigid body constraints.
In addition to these constraints the following elements impose kinematic constraints and, when used in combination with each other or with the above constraints, might lead to overconstraints:
connector elements,
special-purpose contact elements, and
hybrid elements for incompressible material response.
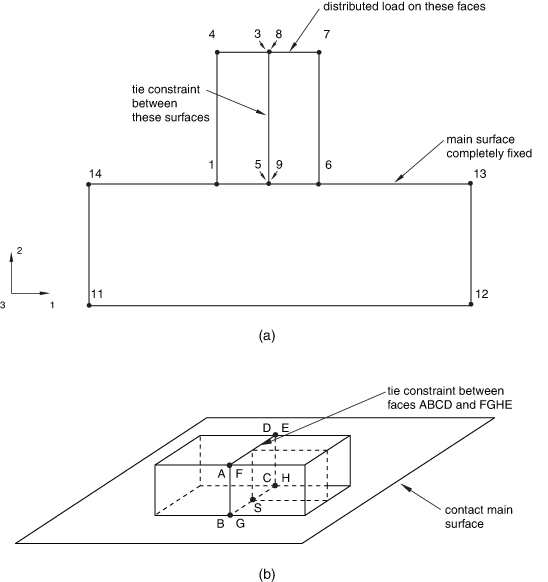
An illustration of several consistent overconstraints is given in Figure 1.
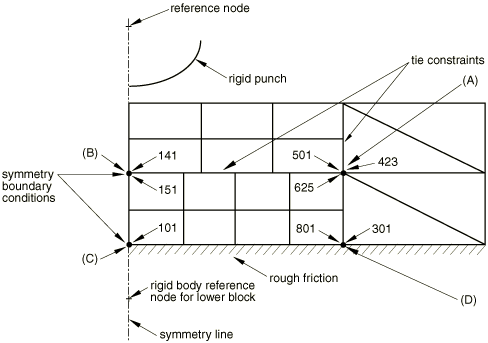
The upper block is built from three separately meshed regions, which are connected together using a surface-based tie constraint. This block is in contact with the lower rigid block, which is made rigid by specifying a rigid body constraint. The rigid block's reference node is fixed. Symmetry boundary conditions are used at the left edge of the upper block, and rough friction is defined for the surface interaction between the upper and lower blocks. The following redundant constraints can be identified:
Intersecting tie constraints: At (A) three nodes share the same location, and their relative motions are constrained by two surface-based tie constraints (one vertical and one horizontal). Only two constraints (two dependent nodes and one independent node) are needed to fully constrain the motion of the three nodes, but three constraints are generated internally (one for the horizontal tie constraint and two for the vertical one). Therefore, one redundant constraint exists.
Tie constraint and symmetry boundary condition: At (B) nodes 141 and 151 have their motion constrained horizontally by the symmetry boundary condition, but their relative motion is also constrained by the surface-based tie constraint. Therefore, one redundant constraint exists.
Rough friction and symmetry boundary condition: At (C) node 101 is constrained horizontally by the symmetry boundary condition. The rough friction contact acts in the same direction as the boundary condition. Therefore, one redundant constraint exists.
Tie constraint and contact interactions: At (D) nodes 801 and 301 are involved in the surface-based tie constraint, but two contact constraints (one at each node) act in the vertical direction. Therefore, one redundant constraint exists.
Even in this simple model the number of redundant constraints is surprisingly large. If not appropriately accounted for, the redundant constraints can lead to convergence difficulties, even nonconvergence. Moreover, in the cases when a solution is obtained (despite the convergence difficulties), the reported reaction forces and contact pressures might be inaccurate.
Abaqus/Standard checks for the inappropriate use of combinations of constraints for the majority of constraint and element types listed in this section. Depending on the complexity of the constraints involved, Abaqus/Standard identifies three classes of consistent and inconsistent overconstraints.
- Overconstraints detected in the model preprocessor
Many relatively simple overconstraints can be identified by inspecting the constraints defined at a node. If a consistent overconstraint is detected, the unnecessary constraints are eliminated automatically and a warning message is generated. If the overconstraints are inconsistent, the analysis is stopped and an error message is generated.
- Overconstraints detected and resolved in an Abaqus/Standard analysis
Some overconstraints involving contact interactions might become overconstrained only during an analysis because of changes in contact status. Certain of these cases are detectable and eliminated automatically by Abaqus/Standard. Appropriate messages are issued.
- Overconstraints detected by the equation solver
Many overconstraints involve complex interactions between various constraint definitions and element types. Automatic resolution of these situations might not be possible. In such cases the equation solver will detect the overconstraint, and a detailed message listing potential causes of the problem will be issued.