Typical Applications
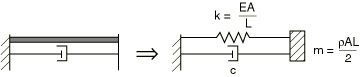
Dashpots are used to model relative velocity-dependent force or torsional resistance. They can also provide viscous energy dissipation mechanisms.
Dashpots are often useful in unstable, nonlinear, static analyses where the modified Riks algorithm is not appropriate (see Unstable Collapse and Postbuckling Analysis for a discussion of the modified Riks algorithm) and where the automatic time stepping algorithm is used because sudden shifts in configuration can be controlled by the forces that arise in the dashpots. In such cases the magnitude of the damping must be chosen in conjunction with the time period so that enough damping is available to control such difficulties but the damping forces are negligible when a stable static response is obtained. See also the contact damping available with contact elements in Abaqus/Standard (see Contact Damping).