are used in boundary value problems defined in unbounded domains or
problems in which the region of interest is small in size compared to the
surrounding medium;
are usually used in conjunction with finite elements;
can have linear behavior only;
provide stiffness in static solid continuum analyses; and
provide “quiet” boundaries to the finite element model in dynamic
analyses.
A solid section definition is used to define the section properties of
infinite elements.
The analyst is sometimes faced with boundary value problems defined in
unbounded domains or problems in which the region of interest is small in size
compared to the surrounding medium. Infinite elements are intended to be used
for such cases in conjunction with first- and second-order planar,
axisymmetric, and three-dimensional finite elements. Standard finite elements
should be used to model the region of interest, with the infinite elements
modeling the far-field region.
Choosing an Appropriate Element
Plane stress, plane strain, three-dimensional, and axisymmetric infinite
elements are available. Reduced-integration elements are also available in
Abaqus/Standard.
Element type CIN3D18R is intended for use with the three-dimensional
variable-number-of-node solids C3D15V, C3D27, and C3D27R in
Abaqus/Standard.
Acoustic infinite elements are also available in
Abaqus.
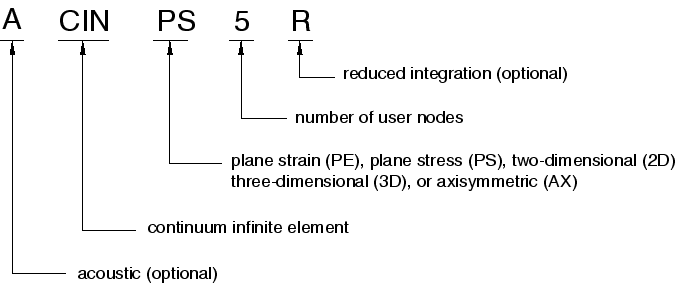
Naming Convention
Infinite elements in
Abaqus
are named as follows:
For example, CINAX4 is a 4-node, axisymmetric, infinite element.
Defining the Elements Section Properties
You use a solid section definition to define the section properties. You
must associate these properties with a region of your model.
Defining the Thickness for Plane Strain and Plane Stress Elements
You define the thickness for plane strain and plane stress elements as part
of the section definition. If you do not specify a thickness, unit thickness is
assumed.
Defining the Reference Point and Thickness for Acoustic Infinite Elements
For acoustic infinite elements you specify the thickness and the reference
point. The thickness is ignored in three-dimensional and axisymmetric elements.
You can prescribe the reference point either as a reference node on the section
definition (see below) or directly by giving its coordinates on the data line
following the thickness value. If both methods are used, the former takes
precedence. If you do not define the reference point at all, an error message
is issued.
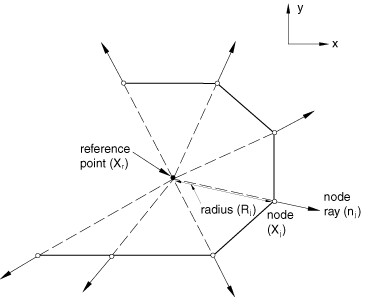
The location of the reference point is used to determine the “radius” and
“node ray” at each node of acoustic infinite elements, as shown in
Figure 1.
Reference point and node rays for acoustic infinite elements.
Each node ray is a unit vector in the direction of the line between the
reference point and the node. These radii and rays are used in the formulation
of acoustic infinite elements. The placement of the reference point is not
extremely critical as long as it is near the center of the finite region
enclosed by the infinite elements. If acoustic infinite elements are placed on
the surface of a sphere, the optimal location for the reference point is the
center of the sphere.
Acoustic infinite elements whose section properties are defined using a
particular solid section definition should not have any nodes in common with
acoustic infinite elements associated with a different solid section
definition. This is to ensure a unique reference point (and, therefore, a
unique “radius” and “node ray”) for each acoustic infinite element node.
The node rays are used to compute “cosine” values at each node of the
infinite element interface. The “cosine” is equal to the smallest dot product
of the unit node ray and the unit normals of all acoustic infinite element
faces surrounding the node (see
Figure 2).
An error message is issued for negative values of “cosine.” Both the “radius”
and “cosine” for all nodes of acoustic infinite elements are printed to the
data (.dat) file as nodal (model) data. For details of how
these quantities are used in the formulation, see
Acoustic infinite elements.
Defining the cosine for acoustic infinite elements.
Defining the Order of Interpolation for Acoustic Infinite Elements
For acoustic infinite elements the variation of the acoustic field in the
infinite direction is given by functions that are members of a set of 10
ninth-order polynomials (for further details, see
Acoustic infinite elements).
The members of this set are constructed to correspond to the Legendre modes of
a sphere; that is, if infinite elements are placed on a sphere and if
tangential refinement is adequate, an ith order acoustic
infinite element will absorb waves associated with the
()th
Legendre mode. The computational cost involved in using all 10 members in this
set of polynomials to resolve the variation of the acoustic field in the
infinite direction may be significant in certain applications in
Abaqus/Explicit.
In such cases you may wish to include only the first few members of the set,
although you should be aware of the possibility of degraded accuracy (i.e.,
increased reflection at acoustic infinite elements) due to using a reduced set
of polynomials. In
Abaqus/Explicit
you can specify the number, N, of ninth-order polynomials
to be used. By default, all 10 members of the set will be used; all 10 are
always used in
Abaqus/Standard.
Specifying a value less than 10 would result in the first
N members of the set being used to model the variation of
the acoustic field in the infinite direction.
Assigning a Material Definition to a Set of Infinite Elements
You must associate a material definition with each infinite element section
definition. Optionally, you can associate a material orientation definition
with the section (see
Orientations).
The solution in the far field is assumed to be linear, so that only linear
behavior can be associated with infinite elements (Linear Elastic Behavior).
In dynamic analysis the material response in the infinite elements is also
assumed to be isotropic.
In
Abaqus/Explicit
the material properties assigned to the infinite elements must match the
material properties of the adjacent finite elements in the linear domain.
Only an acoustic medium material (Acoustic Medium)
is valid for acoustic infinite elements.
Defining Nodes for Solid Medium Infinite Elements
The node numbering for infinite elements must be defined such that the first
face is the face that is connected to the finite element part of the mesh.
The infinite element nodes that are not part of the first face are treated
differently in explicit dynamic analysis than in other procedures. These nodes
are located away from the finite element mesh in the infinite direction. The
location of these nodes is not meaningful for explicit analysis, and loads and
boundary conditions must not be specified using these nodes in explicit dynamic
procedures. In other procedures these outer nodes are important in the element
definition and can be used in load and boundary condition definitions.
Except for explicit procedures, the basis of the formulation of the solid
medium elements is that the far-field solution along each element edge that
stretches to infinity is centered about an origin, called the “pole.” For
example, the solution for a point load applied to the boundary of a half-space
has its pole at the point of application of the load. It is important to choose
the position of the nodes in the infinite direction appropriately with respect
to the pole. The second node along each edge pointing in the infinite direction
must be positioned so that it is twice as far from the pole as the node on the
same edge at the boundary between the finite and the infinite elements. Three
examples of this are shown in
Figure 3,
Figure 4,
and
Figure 5.
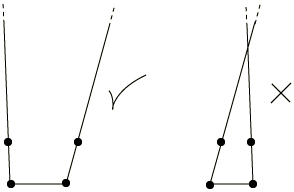
In addition to this length consideration, you must specify the second nodes in
the infinite direction such that the element edges in the infinite direction do
not cross over, which would give nonunique mappings (see
Figure 6).
Abaqus
will stop with an error message if such problems occur. A convenient way of
defining these second nodes in the infinite direction is to project the
original nodes from a pole node; see
Projecting the Nodes in the Old Set from a Pole Node.
The positions of the pole and of the nodes on the boundary between the finite
and the infinite elements are used.
Point load on elastic half-space. Strip footing on infinitely extending layer of soil. Quarter plate with square hole. Examples of an acceptable and an unacceptable two-dimensional infinite
element.
Defining Nodes for Acoustic Infinite Elements
The nodes of acoustic infinite elements need to be defined only for the face
that is connected to the finite element part of the mesh. Additional nodes are
generated internally by
Abaqus
in the direction of the “node ray” (see
Figure 1).
The node rays, which are discussed earlier in this section in the context of
defining the reference point, define the sides of the acoustic infinite
elements.
Using Solid Medium Infinite Elements in Plane Stress and Plane Strain Analyses
In plane stress and plane strain analyses when the loading is not
self-equilibrating, the far-field displacements typically have the form
,
where r is distance from the origin. This form implies
that the displacement approaches infinity as .
Infinite elements will not provide a unique displacement solution for such
cases. Experience shows, however, that they can still be used, provided that
the displacement results are treated as having an arbitrary reference value.
Thus, strain, stress, and relative displacements
within the finite element part of the model will converge to unique values as
the model is refined; the total displacements will
depend on the size of the region modeled with finite elements. If the loading
is self-equilibrating, the total displacements will also converge to a unique
solution.
Using Solid Medium Infinite Elements in Dynamic Analyses
In direct-integration implicit dynamic response analysis (Implicit Dynamic Analysis Using Direct Integration),
steady-state dynamic frequency domain analysis (Direct-Solution Steady-State Dynamic Analysis),
matrix generation (Generating Structural Matrices),
superelement generation (Using Substructures),
and explicit dynamic analysis (Explicit Dynamic Analysis),
infinite elements provide “quiet” boundaries to the finite element model
through the effect of a damping matrix; the stiffness matrix of the element is
suppressed. The elements do not provide any contribution to the eigenmodes of
the system. The elements maintain the static force that was present at the
start of the dynamic response analysis on this boundary; as a consequence, the
far-field nodes in the infinite elements will not displace during the dynamic
response.
During dynamic steps the infinite elements introduce additional normal and
shear tractions on the finite element boundary that are proportional to the
normal and shear components of the velocity of the boundary. These boundary
damping constants are chosen to minimize the reflection of dilatational and
shear wave energy back into the finite element mesh. This formulation does not
provide perfect transmission of energy out of the mesh except in the case of
plane body waves impinging orthogonally on the boundary in an isotropic medium.
However, it usually provides acceptable modeling for most practical cases.
During dynamic response analysis the infinite elements hold the static
stress on the boundary constant but do not provide any stiffness. Therefore,
some rigid body motion of the region modeled will generally occur. This effect
is usually small.
Optimizing the Transmission of Energy out of the Finite Element Mesh
For dynamic cases the ability of the infinite elements to transmit energy
out of the finite element mesh, without trapping or reflecting it, is optimized
by making the boundary between the finite and infinite elements as close as
possible to being orthogonal to the direction from which the waves will impinge
on this boundary. Close to a free surface, where Rayleigh waves may be
important, or close to a material interface, where Love waves may be important,
the infinite elements are most effective if they are orthogonal to the surface.
(Rayleigh and Love waves are surface waves that decay with distance from the
surface.)
For acoustic medium infinite elements, these general guidelines apply as
well.
Defining an Initial Stress Field and Corresponding Body Force Field
In many applications, especially geotechnical problems, an initial stress field and a
corresponding body force field must be defined. For standard elements you define the initial
stress field as an initial condition (Defining Initial Stresses) and the corresponding body force field as a distributed load (Distributed Loads). The body force
cannot be defined for infinite elements since the elements are of infinite extent.
Therefore, Abaqus automatically inserts forces at the nodes of the infinite elements that cause those nodes
to be in static equilibrium at the start of the analysis. These forces remain constant
throughout the analysis. This capability allows the initial geostatic stress field to be
defined in the infinite elements, but it does not check whether or not the geostatic stress
field is reasonable. If the initial stress field is due to a body force loading (such as
gravity loading), this loading must be held constant during the step. In multistep analyses
it must be maintained constant over all steps.
You must remember that when infinite elements are used in conjunction with
an initial stress condition, it is essential that the initial stress field be
in equilibrium. In
Abaqus/Standard
any procedure that determines the initial static (steady-state) equilibrium
conditions is suitable as the first step of the analysis; for example, static
(Static Stress Analysis);
geostatic stress field (Geostatic Stress State);
coupled pore fluid diffusion/stress (Coupled Pore Fluid Diffusion and Stress Analysis);
and steady-state fully coupled thermal-stress (Fully Coupled Thermal-Stress Analysis)
steps can be used. To check for equilibrium in
Abaqus/Explicit,
perform an initial step with no loading (except for the body forces that
created the initial stress field) and verify that the accelerations are small.