Choosing an Appropriate Element
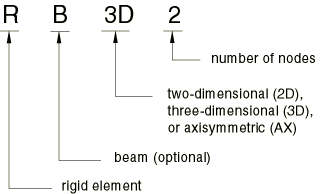
Use R2D2 elements in plane strain or plane stress analysis, RAX2 elements in axisymmetric planar geometries, and R3D3 and R3D4 elements in three-dimensional analysis.
RB2D2 and RB3D2 elements are often used in Abaqus/Standard to model offshore structures that will transmit Abaqus/Aqua loads but will not deform. They can also be used as rigid links between nodes on deformable bodies.