requires definition of the section's shape and its material response;
uses linear elastic behavior in the interior of the frame element;
can include “lumped” plasticity at the element ends to model the
formation of plastic hinges;
can be uniaxial only, with response governed by a phenomenological
buckling strut model, together with linear elasticity and tensile plastic
yielding; and
for pipe sections only, can switch to buckling strut response during
the analysis.
The elastic response of the frame elements is formulated in terms of Young's
modulus, E; the torsional shear modulus,
G; coefficient of thermal expansion,
;
and cross-section shape. Geometric properties such as the cross-sectional area,
A, or bending moments of inertia are constant along the
element and during the analysis.
If present, thermal strains are constant over the cross-section, which is
equivalent to assuming that the temperature does not vary in the cross-section.
As a result of this assumption only the axial force, N,
depends on the thermal strain
where
defines the total axial strain, including any initial elastic strain caused by
a user-defined nonzero initial axial force, and
defines the thermal expansion strain given by
where
is the thermal expansion coefficient,
is the current temperature at the section,
is the reference temperature for ,
is the user-defined initial temperature at this point (Initial Conditions),
are field variables, and
are the user-defined initial values of field variables at this point (Initial Conditions).
The bending moment and twist torque responses are defined by the
constitutive relations
where
is the moment of inertia for bending about the 1-axis of the section,
is the moment of inertia for bending about the 2-axis of the section,
is the moment of inertia for cross-bending,
J
is the torsional constant,
is the curvature change about the first beam section local axis, including
any elastic curvature change associated with a user-defined nonzero initial
moment
(Initial Conditions),
is the curvature change about the second beam section local axis, including
any elastic curvature change associated with a user-defined nonzero initial
moment
(Initial Conditions),
and
is the twist, including any elastic twist associated with a user-defined
nonzero initial twisting moment (torque) T (Initial Conditions).
Defining Temperature and Field-Variable-Dependent Section Properties
The temperature and predefined field variables may vary linearly over the
element's length. Material constants such as Young's modulus,
,
the torsional shear modulus, ,
and the coefficient of thermal expansion, ,
can also depend on the temperature, ,
and field variables .
You must associate the section definition with an element set.
Specifying a Standard Library Section and Allowing Abaqus/Standard to Calculate the Cross-Section's Parameters
Select one of the following section profiles from the standard library of
cross-sections (see
Beam Cross-Section Library):
box, circular, I, pipe, or rectangular.
Specify the geometric input data needed to define the shape of the
cross-section.
Abaqus/Standard
will then calculate the geometric quantities needed to define the section
behavior automatically.
Specifying the Geometric Quantities Directly
Specify a general cross-section to define the area of the cross-section,
moments of inertia, and torsional constant directly. These data are sufficient
for defining the elastic section behavior since the axial stretching, bending
response, and torsional behavior are assumed to be uncoupled.
Specifying the Elastic Behavior
Specify the elastic modulus, the torsional shear modulus, and the
coefficient of thermal expansion as functions of temperature and field
variables.
Defining Elastic-Plastic Section Behavior
To include elastic-plastic response, specify N,
,
,
and T directly as functions of their conjugate plastic
deformation variables or use the default plastic response for
N, ,
,
and T based on the material yield stress.
Abaqus/Standard
uses the specified or default values to define a nonlinear kinematic hardening
model that is “lumped” into plastic hinges at the element ends. Since the
plasticity is lumped at the element ends, no length dimension is associated
with the hinge. Generalized forces are related to generalized plastic
displacements, not strains. In reality, the plastic hinge will have a finite
size determined by the structural member's length and the loading, which will
affect the hardening rate but not the ultimate load. For example, yielding
under pure bending (a constant moment over the member) will produce a hinge
length equal to the member length, whereas yielding of a cantilever with
transverse tip load (a linearly varying moment over the member) will produce a
much more localized hinge. Hence, if the rate of hardening and, thus, the
plastic deformation at a given load are of importance, you should calibrate the
plastic response appropriately for different lengths and different loading
situations.
In the plastic range the only plastic surface available is an ellipsoid.
This yield surface is only reasonably accurate for the pipe cross-section. Box,
circular, I, and rectangular cross-sections can be used at your discretion with
the understanding that the elliptic yield surface may not approximate the
elastic-plastic response accurately. The general cross-section type cannot be
used with plasticity.
Defining N, M1, M2, and T Directly
You can define N, ,
,
and T directly. (See
Material Data Definition
for a detailed discussion of the tabular input conventions. In particular, you
must ensure that the range of values given for the variables is sufficient for
the application since
Abaqus/Standard
assumes a constant value of the dependent variable outside the specified
range.)
Abaqus/Standard
will fit an exponential curve to the user-supplied data as discussed below (see
“Elastic-plastic data curve fit and calculation of default values” below). The
plastic data describe the response to axial force, moment about the
cross-sectional 1- and 2-directions, and torque.
You must specify pairs of data relating the generalized force component to
the appropriate plastic variable. Since the plasticity is concentrated at the
element ends, the overall plastic response is dependent on the length of the
element; hence, members with different lengths might require different
hardening data. The plasticity model for frame elements is intended for
frame-like structures: each member between structural joints is modeled with a
single frame element where plastic hinges are allowed to develop at the end
connections.
At least three data pairs for each plastic variable are required to describe
the elastic-plastic section hardening behavior. If fewer than three data pairs
are given,
Abaqus/Standard
will issue an error message.
Allowing Abaqus/Standard to Calculate Default Values for N, M1, M2, and T
You can use the default elastic-plastic material response for the plastic
variables based on the yield stress for the material. The default
elastic-plastic material response differs for each of the plastic variables:
the plastic axial force, first plastic bending moment, second plastic bending
moment, and plastic torsional moment. Specific default values are given below.
If you define the plastic variables directly and specify that the default
response should be used, the data defined by you will take precedence over the
default values.
Elastic-Plastic Data Curve Fit and Calculation of Default Values
The elastic-plastic response is a nonlinear kinematic hardening plasticity
model. See
Models for Metals Subjected to Cyclic Loading
for a discussion of the nonlinear kinematic hardening formulation.
Nonlinear Kinematic Hardening with N, M1, M2, and T Defined Directly
For each of the four plastic material variables
Abaqus/Standard
uses an exponential curve fit of the user-supplied generalized force versus
generalized plastic displacement to define the limits on the elastic range. The
curve-fit procedure generates a hardening curve from the user-supplied data. It
requires at least three data pairs.
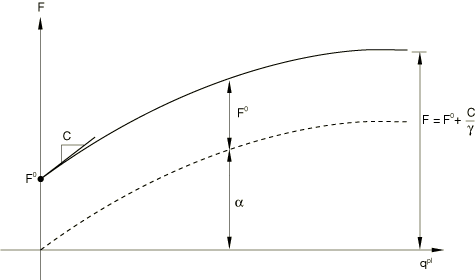
The nonlinear kinematic hardening model describes the translation of the
yield surface in generalized force space through a generalized backstress,
.
The kinematic hardening is defined to be an additive combination of a purely
kinematic linear hardening term and a relaxation (recall) term such that the
backstress evolution is defined by
where F is a component of generalized force, and
C and
are material parameters that are calibrated based on the user-defined or
default hardening data. C is the initial hardening
modulus, and
determines the rate at which the kinematic hardening modulus decreases with
increasing backstress, .
The saturation value of
(),
called ,
is
See
Figure 1
for an illustration of the elastic range for the nonlinear kinematic hardening
model.
Nonlinear kinematic hardening model: yield surface for positive
loading and the center of the yield surface, .
Allowing Abaqus/Standard to Generate the Default Nonlinear Kinematic Hardening Model
To define the default plastic response, three data points are generated
from the yield stress value and the cross-section shape. These three data
points relate generalized force to generalized plastic displacement per unit
length of the element. Since the model is calibrated per unit element length,
the generated default plastic response is different for different element
lengths. The generalized force levels for these three points are
,
,
and .
is the generalized force at zero plastic generalized displacement.
and
are generalized force magnitudes that characterize the ultimate load-carrying
capacity. The slopes between the data points (i.e., the generalized plastic
moduli
and )
characterize the hardening response. See
Figure 2
for an illustration of the default nonlinear kinematic hardening model.
Data points generated for the default nonlinear kinematic hardening
model.
For the plastic axial force,
is the axial force that causes initial yielding. For the plastic bending
moments about the first and second axes,
is the moment about the first and second cross-sectional directions,
respectively, that produces first fiber yielding. For the plastic torsional
moment,
is the torque about the axis that produces first fiber yielding. The
generalized force levels
and ,
along with the connecting slopes
and ,
are chosen to approximate the response of a pipe cross-section made of a
typical structural steel, with mild work hardening, from initial yielding to
the development of a fully plastic hinge. The work hardening of the material
corresponds to the default hardening of the section during axial loading. For
different loading situations the size of the plastic hinge will vary; hence,
the default model should be checked for validity against all anticipated
loading situations. Default values for ,
,
,
and
corresponding to each plastic variable are listed in
Table 1.
Table 1. Default values for generalized forces and connecting slopes for
corresponding plastic variables.
Plastic axial force
First plastic bending moment
Second plastic bending moment
Plastic torsional moment (for box and pipe sections)
Plastic torsional moment (for I-sections)
These default values are available for pipe, box, and I cross-section
types with the values for the coefficients ,
,
and
as shown in
Table 2.
Table 2. Coefficients ,
,
and .
Cross-section type
Pipe
0.30
0.07
1.35
Box
0.17
0.02
1.20
I (strong)
0.10
0.02
1.12
I (weak)
0.43
0.10
1.50
Defining Optional Uniaxial Strut Behavior
Frame elements optionally allow only uniaxial response (strut behavior). In
this case neither end of the element supports moments or forces transverse to
the axis; hence, only a force along the axis of the element exists.
Furthermore, this axial force is constant along the length of the element, even
if a distributed load is applied tangentially to the element axis. The uniaxial
response of the element is linear elastic or nonlinear, in which case it
includes buckling and postbuckling in compression and isotropic hardening
plasticity in tension.
Defining Linear Elastic Uniaxial Behavior
A linear elastic uniaxial frame element behaves like an axial spring with
constant stiffness ,
where E is Young's modulus, A is the
cross-sectional area, and L is the original element
length. The strain measure is the change in length of the element divided by
the element's original length.
Defining Buckling, Postbuckling, and Plastic Uniaxial Behavior: Buckling Strut Response
If uniaxial buckling and postbuckling in compression and isotropic hardening
plasticity in tension are modeled (buckling strut response), the buckling
envelope must be defined. The buckling envelope defines the force versus axial
strain (change in length divided by the original length) response of the
element. It is illustrated in
Figure 3.
Buckling envelope for uniaxial buckling response.
The buckling envelope derives from Marshall Strut theory, which is developed
for pipe cross-section profiles only. No other cross-section types are
permitted with buckling strut response.
Seven coefficients determine the buckling envelope as follows (the default
values are listed, where D is the pipe outer diameter and
t is the pipe wall thickness):
Slope of a segment on the buckling envelope,
(
and ).
Corner on the buckling envelope ().
Slope of a segment on the buckling envelope ().
Corner on the buckling envelope ().
The axial force in the element is required to stay inside or on the buckling
envelope. When tension yielding occurs, the enclosed part of the envelope
translates along the strain axis by an amount equal to the plastic strain. When
reverse loading occurs for points on the boundary of the enclosed part of the
envelope, the strut exhibits “damaged elastic” behavior. This damaged elastic
response is determined by drawing a line from the point on the envelope to the
tension yield point (force value ).
As long as the force and axial strain remain inside the enclosed part of the
envelope, the force response is linear elastic with a modulus equal to the
damaged elastic modulus. At any time that the compressive strain is greater in
magnitude than the negative extreme strain point of the envelope, the force is
constant with a value of zero.
The value of
is a function of an element's geometrical and material properties, including
the yield stress value.
Buckling strut response cannot be used with elastic-plastic frame section
behavior; the strut's plastic behavior is defined by
and the isotropic hardening slope .
Defining the Buckling Envelope
You can specify that the default buckling envelope should be used, or you
can define the buckling envelope. If you define the buckling envelope directly
and specify that the default envelope should be used, the values defined by you
will take precedence.
In either case you must provide the yield stress value, which will be used
to determine the yield force in tension and the critical compressive buckling
load (through the ISO equation described later
in this section).
Defining the Critical Buckling Load
The critical buckling load, ,
is determined by the ISO equation, which is an
empirical relationship determined by the International Organization for
Standardization based on experimental results for pipe-like or tubular
structural members. Within the ISO equation,
four variables can be changed from their default values: the effective length
factors,
and ,
in the first and second sectional directions (the default values are 1.0) and
the added length,
and
in the first and second sectional directions (the default values are 0). These
variables account for the buckling member's end connectivity. The effective
element length in the transverse direction i
()
is .
For details on the ISO equation, see
Buckling strut response for frame elements.
Switching to Optional Uniaxial Strut Behavior during an Analysis
Frame elements allow switching to uniaxial buckling strut response during
the analysis. The criterion for switching is the
“ISO” equation together with the “strength”
equation (see
Buckling strut response for frame elements).
When the ISO equation is satisfied, the
elastic or elastic-plastic frame element undergoes a one-time-only switch in
behavior to buckling strut response. The strength equation is introduced to
prevent switching in the absence of significant axial forces.
When the frame element switches to buckling strut response, a dramatic loss
of structural stiffness occurs. The switched element no longer supports
bending, torsion, or shear loading. If the global structure is unstable as a
result of the switch (that is, the structure would collapse under the applied
loading), the analysis may fail to converge.
To permit switching of the element response, use the default buckling
envelope or define a buckling envelope and provide a yield stress, but do not
activate linear elastic uniaxial behavior for the frame element.
The ISO equation is an empirical
relationship based on experiments with slender, pipe-like (tubular) members.
Since the equation is written explicitly in terms of the pipe outer diameter
and thickness, only pipe sections are permitted with buckling strut response.
The ISO equation incorporates several factors
that you can define. Effective and added length factors account for element end
fixity, and buckling reduction factors account for bending moment influence on
buckling. You can define nondefault values for these factors in each local
cross-section direction.
Defining the Reference Temperature for Thermal Expansion
You can define a thermal expansion coefficient for the frame section. The
thermal expansion coefficient may be temperature dependent. In this case you
must define the reference temperature for thermal expansion,
.
Specifying Temperature and Field Variables
Define temperatures and field variables by giving the value at the origin of
the cross-section (i.e., only one temperature or field-variable value is
given).