Abaqus/Standard
provides a cavity radiation capability for modeling heat transfer effects due
to radiation in enclosures. This cavity radiation functionality:
is provided for two-dimensional, three-dimensional, and axisymmetric
cases;
accounts for symmetries, surface blocking, and surface motion within
cavities; and
can include closed cavities or open cavities (implying that some
radiation takes place to an exterior medium).
Cavity radiation equations are not symmetric; therefore, the nonsymmetric
matrix storage and solution scheme is invoked automatically in models that
include cavity radiation (see
Cavity radiation
and
Defining an Analysis).
Each cavity defines a view factor matrix involving the geometric relations
between the surfaces in the enclosure. These matrices may be updated a number
of times during the analysis (due to moving surfaces in the cavity). Therefore,
large cavity radiation problems may be computationally expensive. Instead, you
should consider using:
average-temperature radiation conditions for modeling enclosures that
are approximately isothermal, with constant emissivity, and do not require
blocking or reflection considerations (see
Thermal Loads);
or
parallel cavity decomposition for parallel calculation of view factors
and solution of the radiative heat transfer equations (see
Decomposing Large Cavities in Parallel
below).
Since cavity radiation effects are calculated only in heat transfer and
coupled thermal-electrical procedures, the only kind of thermal-stress analysis
that can include these effects is sequentially coupled thermal-stress analysis
(see
Sequentially Coupled Thermal-Stress Analysis).
Moreover, unless you allow cavity parallel decomposition (see
Decomposing Large Cavities in Parallel
below), there is a software limit of 16,000 nodes and facets in
Abaqus/Standard.
In addition, there is a limit that you can define at most 100 cavities in a
single analysis.
Model Definition
When you define the model for a cavity radiation problem, you must:
In the first step of a cavity radiation analysis you must associate with
each cavity a radiation view factor definition, which controls the calculation
of view factors for the cavity. You then may:
define boundary conditions such as temperature and forced convection
(see
Boundary Conditions);
control the cavity radiation and view factor calculations in each step
(the specifications from the previous step are used if they are not redefined
in a step; see
Controlling View Factor Calculation during the Analysis);
If any of the above are included in your analysis, they must be defined
within a heat transfer or coupled thermal-electrical step definition.
Defining Surfaces
Cavities are defined in
Abaqus/Standard
as collections of surfaces, which are composed of facets. In axisymmetric and
two-dimensional cases a facet is a side of an element; in three-dimensional
cases a facet is a face of a solid element or a surface of a shell element.
Rigid surfaces cannot be used in cavity radiation problems.
Surfaces are defined as described in
Element-Based Surface Definition.
You may associate each surface with a surface property definition as part of
the surface option, or you may associate surfaces with surface properties as
part of the cavity definition option. The surface properties are defined as
described below.
Restrictions
Surfaces that are associated with cavity radiation are subject to the
following restrictions in addition to the general surface definition
restrictions outlined in
Element-Based Surface Definition:
Surfaces cannot overlap because of the ambiguity that would result in
the associated property definitions and in the blocking specification.
A surface can be used only in one cavity definition (the same surface
cannot appear in two different cavities).
In addition, the three-dimensional quadrilateral facets should be as close
to planar as possible; otherwise, the quality of the view factor calculations
will be compromised.
Controlling Spurious Spatial Oscillations
The radiation flux for each facet is calculated based on the average of the
nodal temperatures on that facet (see
Cavity radiation).
This value of radiation flux is then distributed to each node in proportion to
its area. Consequently, the mesh must be sufficiently fine that temperature
differences across elements are small. Otherwise, computed fluxes at nodes with
temperatures above the facet average will be excessively low, and the fluxes at
nodes with below-average temperatures will be too high. This tends to induce a
spatially oscillatory solution. This effect can be eliminated by reducing the
element size in the vicinity of high temperature gradients.
Defining Surface Radiation Properties
Cavity radiation problems are intrinsically nonlinear, due to the dependence
of the radiative flux on the fourth power of the facet temperature. Further,
nonlinearity can be introduced by describing the emissivity,
,
as a function of temperature.
Defining the Emissivity
Emissivity is a dimensionless quantity with a value that is greater than or
equal to zero and less than or equal to one. A value of
corresponds to all radiation being reflected by the surface. A value of
corresponds to black body radiation, where all radiation is absorbed by the
surface. You can define the emissivity, ,
of a surface as a function of temperature and other predefined field variables.
You must assign a name to the surface property that defines the emissivity.
Controlling the Accuracy of Temperature-Dependent Emissivity Changes
Abaqus/Standard
evaluates the emissivity, ,
based on the temperature at the start of each increment and uses that
emissivity value throughout the increment. When emissivity is a function of
temperature or field variables, you can control the time incrementation for the
heat transfer or coupled thermal-electrical step by specifying the maximum
allowable emissivity change during an increment, .
If this tolerance is exceeded,
Abaqus/Standard
will cut back the increment size until the maximum change in emissivity is less
than the specified value. If you do not specify a value for
,
a default value of 0.1 is used.
Defining the Stefan-Boltzmann Constant and Value of Absolute Zero
You must define the Stefan-Boltzmann constant, ,
and the value of absolute zero, ;
there are no default values for these constants.
Constructing a Cavity
You construct cavities as collections of the surfaces defined as described
above. Each surface can be used only in one cavity definition. Each cavity must
have a unique name; this name is used to specify view factor calculations. The
cavity name can also be used to request output.
Setting Surface Properties
By default, a cavity is assumed to consist of surfaces for which surface
properties have already been defined. Instead, you may define surface
properties as part of the cavity definition.
Creating a Closed Cavity
By default, a cavity is assumed to be closed.
Creating an Open Cavity
You can specify an open cavity by defining the reference temperature of the
external medium. This ambient temperature value is converted to an absolute
temperature scale based on the definition of absolute zero. You can verify the
degree of opening in the cavity by specifying a tolerance for the accuracy of
the view factor calculations; radiation to the external medium will take place
only if the deviation of the sum of the view factors from unity is more than
this tolerance. See
Controlling the Accuracy of View Factor Calculations
below for details.
Creating a Cavity with Multiple Openings or Complex Ambient Conditions
The open cavity definition allows for a cavity with a single opening into
an ambient environment with a single, constant temperature value. If the cavity
has multiple openings or the ambient temperature is not constant, you should
model the surroundings differently.
You should close any cavity openings with elements, and prescribe the
temperatures of the external media on these elements. Since the cavity is now
closed, you should not specify an ambient temperature with the cavity
definition. The temperature definition that you use for the closing elements
provides the ambient temperature, and it allows you to specify different
temperatures, including variable temperatures, at the cavity openings. The
elements modeling the external media should not share nodes with the cavity
elements (so that conduction will not take place between them). The surfaces
defined by the external media elements should have an emissivity of 1.
Decomposing Large Cavities in Parallel
By default,
Abaqus/Standard
uses a single working thread for the calculation of the view factor matrix and
solution of the radiative heat transfer equations (see
Cavity radiation).
This method is robust and works well for small cavities composed of hundreds of
facets, but it becomes inefficient and computationally expensive for large
cavities composed of thousand of facets. Moreover, the memory requirements for
these cavities may be prohibitively large for a single computational node (the
view factor matrix is the size of the number of facets squared). In these cases
you should consider allowing
Abaqus/Standard
to decompose the cavity among all CPUs during
view factor calculations and solution of the radiative heat transfer equations.
Solving Radiative Heat Transfer Equations in Parallel
Abaqus/Standard
uses an iterative solution technique for obtaining the radiative heat fluxes
when cavity parallel decomposition is enabled. This technique is based on
Krylov methods, employs a preconditioner, and uses only
MPI-based parallelization (see
Parallel Execution in Abaqus/Standard
for details). This iterative technique is used only to solve the cavity
radiation equations and does not require user intervention. You may still opt
to use the either the iterative or direct sparse solvers for the solution of
the heat transfer finite element equations.
Convergence of Models with Decomposed Cavities
The exact cavity radiation equations are solved whether parallel
decomposition is allowed or not; however, when parallel decomposition is
active,
Abaqus/Standard
may require more iterations to obtain a solution. This slower rate of
convergence comes from an approximation to the Jacobian (the linearization of
the radiation fluxes) that is based on small changes of the irradiation (any
part not due to emission from the surface). Models involving surfaces with low
emissivities and steady-state analyses might be especially affected. If you
encounter convergence problems with parallel decomposed cavities, you may
consider
Kinematic Constraints on Models with Decomposed Cavities
Kinematic constraints (for example, coupling constraints, linear constraint equations,
multi-point constraints, or surface-based tie constraints) can be applied to any node or
surface belonging to a cavity where parallel decomposition is allowed. However, the nodes
or surfaces must be the independent (main) nodes or surfaces in the constraint definition.
Defining Cavity Symmetries
Taking advantage of geometric symmetry can reduce computational model size
and simulation time. Instead of modeling all of the parts or components in a
symmetric assembly, you can model a smaller repeated component and take
symmetry into account in the definition of the cavity radiation interaction. In
Abaqus/Standard
cavity definitions with defined symmetries take into account the radiation
interactions between each cavity facet and between all of the facets in the
cavity and all of its symmetric images.
Abaqus/Standard
does not check that the model created using cavity symmetries is physically
realistic. You must check the input and results carefully to ensure that a
valid model is created.
You must assign a name to each radiation symmetry definition for reference
by a radiation view factor definition. The radiation view factor definition and
corresponding radiation symmetry definition must appear in the same step.
Cyclic, periodic, and/or reflection symmetries can be defined as described
below.
Reflection Symmetry
You define reflection symmetry to create a cavity that is composed of the
user-defined cavity surface plus its reflected image through a line or plane.
You must identify the dimensionality of the cavity when you define reflection
symmetry.
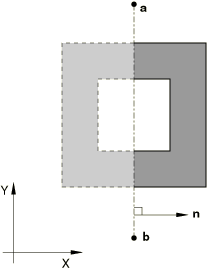
Reflection of Two-Dimensional Cavities
You can define the cavity symmetry by reflecting the cavity surface
through a line, as shown in
Figure 1.
Reflection symmetry through a line.
This type of reflection can be used only with two-dimensional cavities.
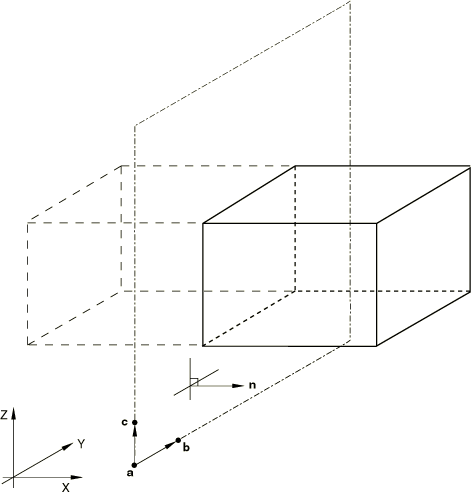
Reflection of Three-Dimensional Cavities
You can define the cavity symmetry by reflecting the cavity surface
through a plane, as shown in
Figure 2.
Reflection symmetry through a plane.
This type of reflection can be used only with three-dimensional cavities.
Reflection of Axisymmetric Cavities
You can define the cavity symmetry by reflecting the cavity surface
through a line of constant z-coordinate, as shown in
Figure 3.
Reflection symmetry through a line of constant
z-coordinate.
This type of reflection can be used only with axisymmetric cavities.
Periodic Symmetry
You can define cavity symmetry by periodic repetition in a given direction.
Physically, periodic symmetry is understood as an infinite number of
repetitions of the same image at a periodic interval. Numerically, periodic
symmetry has to be represented by a finite number of repetitions of the
periodic image. You can define the number of repetitions used in the numerical
calculation, n.
The periodic symmetry will result in a cavity composed of the user-defined
cavity plus twice n similar images, since the
periodic symmetry is assumed to apply in both the positive and negative
directions. By default, n=2.
Although symmetries do not increase the size of the view factor matrix, they
do make its calculation more expensive. Therefore, the number of repetitions
should be minimized, but the value of n should be
large enough that the view factor matrix is calculated accurately. Output
variable VFTOT can be used to check the amount of closure implied by the
symmetry. (See
Controlling the Accuracy of View Factor Calculations
below.) Periodic symmetry for defining the cavity radiation view factor matrix
does not impose symmetry conditions automatically in the heat transfer
analysis. It may be necessary to impose appropriate constraints on the
temperature and loading conditions at the nodes on the periodic symmetry planes
to obtain a meaningful solution from the underlying heat transfer analysis.
You must identify the dimensionality of the cavity when you define periodic
symmetry.
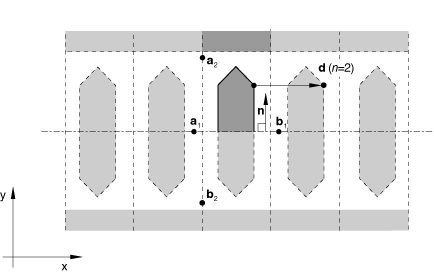
Periodic Symmetry of Two-Dimensional Cavities
You can create a cavity that is composed of a series of similar images
generated by repetition along a two-dimensional distance vector, as shown in
Figure 4.
Two-dimensional periodic symmetry.
The repeated images are bounded by lines parallel to line
ab. The distance vector must be defined so that it
points away from line ab and into the domain of
the model. This type of periodic symmetry can be used only with two-dimensional
cavities.
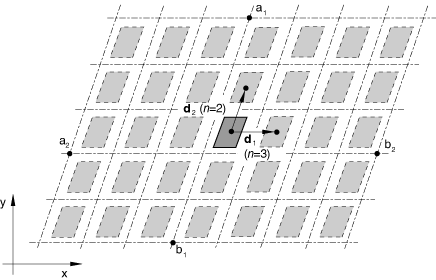
Periodic Symmetry of Three-Dimensional Cavities
You can create a cavity that is composed of a series of similar images
generated by repetition along a three-dimensional distance vector, as shown in
Figure 5.
The repeated images are bounded by planes that are parallel to plane
abc. The distance vector must be defined so that
it points away from plane abc and into the domain
of the model. This type of periodic symmetry can be used only with
three-dimensional cavities.
Three-dimensional periodic symmetry.
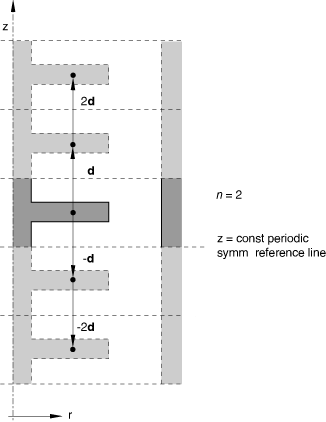
Periodic Symmetry of Axisymmetric Cavities
You can create a cavity that is composed of a series of similar images
generated by repetition in the z-direction, as shown in
Figure 6.
Axisymmetric periodic symmetry.
The repeated images are bounded by lines of constant
z-coordinate. The z-distance vector
must be defined so that it points away from the z-constant
periodic symmetry reference line and into the domain of the model. This type of
periodic symmetry can be used only with axisymmetric cavities.
Cyclic Symmetry
You can define cavity symmetry by cyclic repetition of the user-defined
cavity surface about a point or an axis. The cavity defined by cyclic
repetition must cover 360°.
You must define the number of cyclically similar images that compose the
cavity, n. The angle of rotation about a point or
axis used to create cyclically similar images is equal to
360°/n.
You must identify the dimensionality of the cavity when you define cyclic
symmetry.
Cyclic Symmetry of Two-Dimensional Cavities
You can define the cavity symmetry by rotating the cavity about a point,
l, as shown in
Figure 7.
Cyclic symmetry about a point.
The cavity surface defined in the model must be bounded by the line
lk and a line passing through
l at an angle, measured counterclockwise when
looking into the plane of the model, of 360°/n to
lk. This type of cyclic symmetry can be used only
for two-dimensional cavities.
Cyclic Symmetry of Three-Dimensional Cavities
You can define the cavity symmetry by rotating the cavity about an axis,
lm, as shown in
Figure 8.
The cavity surface defined in the model must be bounded by the plane
lmk and a plane passing through the line
lm at an angle, measured clockwise when looking
from l to m, of
360°/n to lmk. Line
lk must be normal to line
lm. This type of cyclic symmetry can be used only
for three-dimensional cavities.
Cyclic symmetry about an axis.
Combining Symmetries
Reflection, periodic, and cyclic symmetries can be combined as shown in
Table 1.
Figure 9
through
Figure 12
illustrate some possible symmetry combinations.
Table 1. Permissible number of symmetry definitions used in combination.
Reflection
Periodic
Cyclic
2D
3D
Axi
Restrictions
1
0
0
•
•
•
2
0
0
•
•
3
0
0
•
0
1
0
•
•
•
0
2
0
•
•
0
3
0
•
1
1
0
•
•
1
2
0
•
2
1
0
•
0
0
1
•
•
1
0
1
•
0
1
1
•
,
,
,
are normals to lines or planes of reflection symmetry.
,
,
are distance vectors used to define periodic symmetry.
is the
direction of the axis of cyclic symmetry in three-dimensional cases.
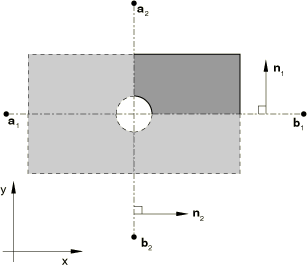
Combination of two reflection symmetries in two dimensions. Combination of two periodic symmetries in two dimensions. Combination of one reflection symmetry and one periodic symmetry in
two dimensions. Combination of one cyclic symmetry and one periodic symmetry in three
dimensions.
Prescribing Motion during a Cavity Radiation Analysis
In many cavity radiation problems such as simulations of manufacturing
sequences, radiation view factors change because surfaces are moved during the
analysis. You can specify surface motions during heat transfer or coupled
thermal-electrical analysis.
The prescribed motions affect only the calculation of view factors (and,
therefore, radiation fluxes) in heat transfer due to cavity radiation. They do
not affect heat conduction, storage, or distributed flux contributions.
You can define both the translational and rotational components of the
motion within a step independently. For example, you can prescribe the
translational motion of a node set according to a certain amplitude function
and then prescribe the rotational motion of the node set according to a
different amplitude function. In each step, each component of motion can be
specified only once for any particular node.
Motions can also be prescribed during steps in which the cavity radiation is
turned off, as described below.
Translational Motion
Translations, ,
are specified in terms of global x-,
y-, and z-components unless a local
coordinate system is defined at the nodes for which motion is specified; then
translations are specified in terms of local x-,
y-, and z-components (see
Transformed Coordinate Systems).
Translational displacements are always specified as total values of
translational motion. This treatment of translations is consistent with that
used for displacement boundary conditions (Boundary Conditions)
in stress/displacement analyses. The default is to apply translational motion.
Translational velocities can also be specified. Translational velocities
always refer to the current step; therefore, the rate of translational motion
specified as a velocity is in effect only during the step for which it is
defined. This behavior is different from velocity boundary conditions, where
velocities stay in effect in subsequent steps if they are not redefined.
Rotational Motion
Displacements due to a rigid body rotation, ,
can be defined by specifying the magnitude of the rotation and the rotation
axis. In three dimensions the rotation axis is defined by specifying two
points, and
, on the axis of
rotation. In two dimensions the rotation axis is assumed to be normal to the
plane of the model and is defined by specifying one point,
.
The coordinates of the points defining the axis of rotation must be defined
in the configuration at the beginning of the step for which rigid body rotation
is being defined.
Motion due to rigid body rotation during a step is specified as the amount
of rotation that takes place during that step only. Therefore, the rigid body
rotation specified during a step is local to that step; if no rigid body
rotation is specified in the following step, no further rotation occurs.
The treatment of rigid body rotations is different from that of
translations: rigid body rotations are specified incrementally from step to
step while translations are specified as total values.
Prescribing Large Rotational Motions
Prescribed rotational motions of more than
radians or complex sequences of rotations about different directions in
three-dimensional models are most simply defined by specifying rotational
velocities, which allows the definition to be given in terms of the angular
velocity instead of the total rotation.
Abaqus/Standard
calculates the increment of rotation as the average of the angular velocities
at the beginning and end of each increment multiplied by the time increment.
(See
Conventions.)
Example
For example, if a rotation of
about the z-axis is required, with no rotation about the
x- and y-axes, and assuming a step
time of 1.0, specify a constant angular velocity of
as follows:
The angular velocity will be constant since the default variation for
motions prescribed using a predefined velocity field in a heat transfer or
coupled thermal-electrical step (both steady-state and transient) is a step
function (see
Defining an Analysis).
An amplitude reference could be used to specify other variations of the angular
velocity.
If, in the next step, the same node (or node set) should have an
additional rotation of
radians about the global x-axis, assuming again a step
time of 1.0, prescribe a constant angular velocity as follows:
Motions involving two or more simultaneous rigid body rotations about
different axes cannot be specified directly. An example of simultaneous rigid
body rotations is a satellite rotating about its own axis while orbiting the
earth. Such complex motions can be defined with user subroutine
UMOTION. This subroutine allows specification of the time
variation of the magnitude of the translational components of the motion
(degrees of freedom 1–3) at each node.
If you specify the magnitude of the translation as part of the prescribed
motion definition, it will be modified by the amplitude curve (if any) and
passed into subroutine
UMOTION, where it can be redefined.
When user subroutine
UMOTION is used to define the motion of a certain node set in a
step, only one prescribed motion can be defined in that step for that node set.
The complete motion of all nodes in the node set during the step must be
defined in the user subroutine.
Simultaneous Translational and Rotational Motion
Whenever simultaneous translational and rotational motion is specified, the
total motion of a node during step k is defined as
where
is the current location of the node due to the specified motion history,
is the original
location of the node,
is the displacement of the node due to the translational motion specified in
the step, and
is the displacement of the node due to rigid body rotation during step
i.
In these cases the translation is applied first and the rotation is then
assumed to be about the translated (material) axis. In other words, the
displacement
due to rigid body rotation during step i is computed
as the rotation about an axis defined by points
and
where
In the preceding equations and
are the locations of
the points used to define the axis of rotation for the prescribed rotational
motion (they refer to the configuration at the beginning of step
i) and
is the displacement due to translational motion during the step
(,
where
is the time at the end of step ).
Example
As an example, consider a three-dimensional problem with
x–y planar motion as shown in
Figure 13.
Planar motion example.
The centroid of the object of interest is initially located at
.
In the first step the object is translated 4 length units in the
x-direction while at the same time it rotates clockwise
180° (
radians) about the z-axis at constant angular velocity.
This motion moves the object from position A to position
C in
Figure 13.
Halfway through this motion, at position B, the
displacements due to the rigid body rotation are calculated by applying the
translation to the z-axis (the axis of rotation) and then
applying a 90° rotation about this translated axis.
In the second step the object is translated −3 length units in the
y-direction only. This motion places the object at
position D with no additional rotation. Finally, in the
third step the object is simultaneously translated 5 length units at an angle
of 53.13° to the y-direction and rotated clockwise, again
at constant angular velocity, through 180° about the
z-axis. This motion returns the object to its original
position.
Assuming that each step time is 1.0, the input required for the above
motion sequence is as follows:
For any prescribed motion you can refer to an amplitude curve that gives the
time variation of the motion throughout a step (see
Amplitude Curves).
Controlling the Frequency of View Factor Recalculation due to Motion
You can control how view factors are recalculated during a step as a result
of prescribed motion by specifying a value for the maximum allowable motion,
max, for a particular node set. View factor
recalculation is triggered if a displacement component at any node in the
specified node set exceeds the specified value for
max.
You must respecify the value of max and the node
set in every step where recalculation is required; the values do not remain in
effect for subsequent steps.
View factor recalculation can be expensive; use discretion when choosing a
value for max.
Controlling View Factor Calculation during the Analysis
The cavity radiation capability can be used in applications such as the
simulation of manufacturing sequences where radiation view factors change
during the simulation. Therefore, radiation view factor definitions provide
significant flexibility for the control of view factor calculations during a
step.
Multiple radiation view factor definitions can be specified within a step
definition if different types of radiation and view factor calculations are
required for different cavities. Different types of view factor calculations
can be specified for the same cavity in different steps of the analysis.
By default, view factors are calculated at the beginning of the first step
that includes a radiation view factor definition. View factors are recalculated
at the beginning of a subsequent step only if the view factor definition
changes in that step; for example, if different surface blocking checks are
specified for the same cavity. In a restart analysis
Abaqus/Standard
reads the radiation view factors from the user-specified restart step and
increment and recalculates the view factors only if the view factor definitions
have changed.
You can specify the name of the cavity for which radiation view factor
control is being specified. If you do not specify a cavity name, the radiation
view factor definition applies to all cavities in the model.
Activating and Deactivating Cavity Radiation
There are practical situations in which it may be useful to switch cavity
radiation effects on and off during the analysis. For example, radiation may be
taking place in a cavity that is then filled with a fluid so that radiation is
no longer significant; later in the analysis, radiation may resume when the
fluid is drained from the cavity. In such cases you can use a radiation view
factor definition to switch the radiation on and off in any particular cavity
during one or more steps of the analysis.
When cavity radiation is switched back on after having been switched off,
Abaqus/Standard
will use the last view factors calculated in the last step in which cavity
radiation was active. However, if motion is prescribed during the time that the
cavity radiation is switched off and one of the displacement components of a
node in the specified node set exceeds the value for the maximum allowable
motion, max, specified in the step during which
cavity radiation is switched off, the view factors will be recalculated at the
beginning of the step in which the cavity radiation is switched back on.
Controlling the Accuracy of View Factor Calculations
Abaqus/Standard
uses a progressive integration scheme for view factor calculation. When facets
are sufficiently far from each other, a lumped area approximation is used. If
the facets are close to each other but one of the facets is much larger than
the other, an infinitesimal-to-finite approximation is used. For all other
cases a contour integral is numerically calculated to compute the view factor.
See
View factor calculation
for details.
Two nondimensional parameters are calculated for each facet pair to
determine which integration scheme is used:
where
is the area of the smaller facet,
is the area of the larger facet, and d is the distance
between their centroids. The lumped area approximation is used whenever the
nondimensional distance square parameter ,
where
has a default value of 5.0. If ,
an infinitesimal-to-finite area approximation is used if the facet area ratio
,
where
has a default value of 64.0. Otherwise, a more precise calculation is
performed, involving the numerical integration of a contour integral.
You can customize the accuracy and speed of the view factor calculation by
specifying the parameters
and
and the number of integration points per edge. For example,
Abaqus/Standard
will used lumped area approximations throughout the whole model if
is set to zero. Likewise, the more precise, albeit more expensive, numerical
integration method will always be used if
and
are set to very large numbers.
View Factor Calculation Checks for Closed Cavities
You can provide a tolerance on the accuracy of the view factor
calculation. In a closed cavity the sum of the view factors for each cavity
facet should be one.
Abaqus/Standard
compares the value of the specified tolerance to the largest view factor matrix
row sum deviation from unity; that is, .
If the tolerance is violated for a closed cavity, the analysis is terminated.
The default view factor tolerance is 0.05. Failure to meet this criterion may
indicate a need for mesh refinement.
View Factor Calculations in Cavities with Symmetries
The view factor calculations account for the closure of a cavity implied
by any cavity symmetries. For cavities without periodic or cyclic symmetries
the view factors are calculated exactly for two-dimensional geometries, but
approximations are made for axisymmetric and three-dimensional geometries.
These approximations become less accurate as the distance between surfaces
decreases. Define heat radiation to model closely spaced surfaces (see
Thermal Contact Properties).
View Factor Calculations in Open Cavities
If the sum of the view factors for facets in an open cavity (defined by
specifying a value for the ambient temperature) deviates from unity by more
than the specified view factor tolerance, radiation to the ambience will take
place. In nearly closed cavities this deviation may be small. If the tolerance
is not violated, radiation to the external medium is not included even though
the cavity is defined to be open; a warning message is issued to this effect.
You can reduce the view factor tolerance to include such radiation.
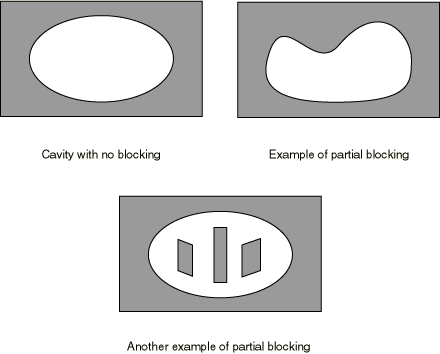
Controlling Checks for Surface Blocking
Heat is transferred between surfaces that have unobstructed direct views of
each other (see
Figure 14);
“blocking” may occur in geometrically complex cavities.
Illustrations of blocking.
Surface blocking checks may be computationally expensive in cavities with
many surfaces; therefore, significant computational time may be saved by
specifying which surfaces are potential blocking surfaces, as described below.
View factor calculations with blocking surfaces are especially sensitive to
mesh refinement. If a mesh is too coarse, the view factors may not add up to
one (in a closed cavity). To obtain accurate results, the mesh should be
refined until the view factors can be summed accurately.
Full Blocking Checks
By default,
Abaqus/Standard
will check for blocking of every surface with itself and all other surfaces.
Partial Blocking Checks
You can specify a list of the potential blocking surfaces in the cavity.
No Blocking Checks
You can indicate that there are no blocking surfaces in the cavity; in
this case
Abaqus
omits all checks for blocking.
Reducing Computations for Surfaces That Are Far Apart
In cases where there are many surfaces in the cavity, surfaces separated by
more than a certain distance may not be able to “see” each other for the
purposes of radiation because of blocking by other surfaces. You can specify
the distance beyond which view factors need not be calculated, which reduces
the computational effort required for the view factor calculations.
Memory Usage in Cavity Radiation Analyses
The cavity radiation heat transfer between facets of a surface in
Abaqus
is modeled using a full, unsymmetric matrix defining interactions between each
node and all others in the cavity. For surfaces with large numbers of nodes
this matrix may be large, resulting in memory requirements that are
significantly larger than those for the finite element portion of the analysis
without the cavity radiation interaction.
To minimize memory requirements and computational cost for cavity radiation heat transfer
analysis, the cavity can be defined using a coarser mesh of heat transfer shell elements
having a single degree of freedom per node. The overlaid element should have minimal heat
capacity and conduction, and it should be used for the definition of the cavity in place
of the physical, multiple-degree-of-freedom shell. The overlaid element should be used to
define the main surface in a tied coupling constraint (Mesh Tie Constraints); the
multiple-degree-of-freedom, physical, heat transfer shell element forms the secondary
surface.
Initial Conditions
By default, the initial temperature of all nodes is zero. You can specify nonzero initial
temperatures in a cavity radiation analysis; see Defining Initial Temperatures.
In a heat transfer analysis involving forced convection through the mesh,
you can define nonzero initial mass flow rates at the nodes of the forced
convection/diffusion heat transfer elements in the model (see
Uncoupled Heat Transfer Analysis).
Boundary Conditions
You can specify boundary conditions to prescribe temperatures (degree of
freedom 11) at the nodes (see
Boundary Conditions).
Shell elements have additional temperature degrees of freedom 12, 13, etc.
through the thickness (see
Conventions).
Boundary conditions can be specified as functions of time by referring to
amplitude curves (Amplitude Curves).
For purely diffusive elements, a boundary without any prescribed boundary
conditions (natural boundary condition) corresponds to an insulated surface.
For forced convection/diffusion elements, only the flux associated with
conduction is zero; energy is free to convect across an unloaded surface. This
natural boundary condition correctly models areas where fluid is crossing a
surface (as, for example, at the upstream and downstream boundaries of the
mesh) and prevents spurious reflections of energy back into the mesh.
Loads
The following types of loading can be prescribed in addition to the cavity
radiation, as described in
Thermal Loads:
Concentrated heat fluxes
Body fluxes and distributed surface fluxes
Convective film conditions and radiation conditions
Predefined Fields
You cannot specify temperatures as field variables in heat transfer or
coupled thermal-electrical analyses. Boundary conditions should be used
instead, as described above.
You can specify values of other user-defined field variables during the
analysis. These values will affect field-variable-dependent material
properties, if any. See
Predefined Fields.
In addition to the elements that you define,
Abaqus/Standard
uses internal elements that are generated automatically from your definition of
radiation cavities.
Output
The following output variables are available for cavity radiation:
Surface variables
RADFL
Radiation flux per unit area. This variable does include heat flux to
ambient in an open cavity.
RADFLA
Radiation flux over a facet.
RADTL
Time integrated radiation per unit area.
RADTLA
Time integrated radiation over a facet.
VFTOT
Total view factor for a facet (sum of the view factor values in the row of
the view factor matrix corresponding to the facet).
Writing the View Factor Matrices to the Results File
You can write the view factor matrices for cavity radiation interactions in
heat transfer or coupled thermal-electrical analyses to the results
(.fil) file if parallel decomposition for the cavity is
not enabled.. The entire radiation view factor matrix is written for each
cavity radiation element in the specified cavity.
You can control the frequency of view factor matrix output by specifying the
required output frequency in increments. The default output frequency is 1.
Specify an output frequency of 0 to suppress output. The output will always be
written at the last increment of each step unless you specify an output
frequency of 0.
For the cavity radiation interaction, you can request cavity-, element-, or
surface-based radiation output such as radiation fluxes, view factor totals for
a facet, and facet temperatures to the data, results, and/or output database
files. The output requests can be repeated as often as necessary to request
output for different variables, different cavities, different surfaces,
different element sets, etc. The surface variables that can be requested are
listed above.
You can specify the particular cavity, element set, or surface for which
output is being requested. If you do not specify a cavity, element set, or
surface, output will be provided for all cavities in the model. The same
cavity, element set, or surface can appear in several radiation output
requests.
By default, no cavity radiation data output will be provided. If you define
a radiation output request without specifying the desired output variables, all
six cavity radiation surface variables will be output.
You can control the frequency of radiation output by specifying the required
output frequency in increments. The default output frequency is 1. Specify an
output frequency of 0 to suppress output. The output will always be written at
the last increment of each step unless you specify an output frequency of 0.
Printed Output
The output tables generated by a radiation output request to the data file
are organized on a surface-by-surface basis. The rows that will appear in a
particular table are defined by choosing a cavity, surface, or element set:
each row of a table corresponds to an individual element face that is part of
the cavity, surface, or element set chosen. If all of the variables in a row of
a table are zero, the row is not printed.
The first column of each table is the element number, and the second
column is the element face identifier. You choose the variables to appear in
the remaining columns. There is no limit to the number of tables that can be
defined.
As an example, consider a heat transfer model containing a cavity named
CAV1, which, in turn, is composed of surfaces
SURF1 and
SURF2. If you request output of radiation flux
(RADFL) and facet temperature (FTEMP) to the data file for this model, two tables will appear in the
data file. One table will contain RADFL and FTEMP output for all element faces composing surface
SURF1, and the other table will contain the
same output variables for all element faces making up surface
SURF2.
By default,
Abaqus/Standard
writes a summary of the maximum and minimum values in each column of the table.
You can choose to suppress this summary. In addition, you can choose to print
the total of each column in the table, which is useful, for example, to sum
radiation fluxes over all facets composing a radiation surface. By default,
these totals are not printed.
Input File Template
The following template shows the options required for a
transient, cavity radiation analysis of a closed two-dimensional symmetric
cavity. All surfaces within the cavity topcav
have the same emissivity. The surface surf2
moves (translation only) during the analysis. In the second step surface
surf2 stops moving, cavity radiation is turned
off, all thermal loads except the surface convection are removed, and a
steady-state heat transfer analysis is conducted to determine the final
temperature of the system.
HEADING
…
PHYSICAL CONSTANTS, ABSOLUTE ZERO=, STEFAN BOLTZMANN=
SURFACE, NAME=surf1, PROPERTY=surfp
elset1, S1
elset2, S2
SURFACE, NAME=surf2, PROPERTY=surfp
elset3,
SURFACE PROPERTY, NAME=surfp
EMISSIVITYData lines to define the emissivity of the surfaces in the modelCAVITY DEFINITION, NAME=topcav
surf1, surf2
INITIAL CONDITIONS, TYPE=TEMPERATUREData lines to prescribe initial temperatures at the nodesAMPLITUDE, NAME=motion
Data lines to define amplitude curve to be used for motion of surface surf2
AMPLITUDE, NAME=film
Data lines to define amplitude curve to be used for the convection film coefficient, h
*************
** Step 1
*************
STEPHEAT TRANSFER, MXDEM=, DELTMX=
Data line to define incrementationRADIATION VIEW FACTOR, CAVITY=topcav, VTOL=tol, SYMMETRY=outer,
NSET=nset, MDISP=maxRADIATION SYMMETRY, NAME=outer
REFLECTION, TYPE=LINEData line to define line of symmetryMOTION, TRANSLATION, TYPE=DISPLACEMENT, AMPLITUDE=motion
Data line to define motion of nodes on surface surf2
CFLUX and/or DFLUXData lines to define concentrated and/or distributed fluxesBOUNDARYData lines to prescribe temperatures at selected nodesFILM, FILM AMPLITUDE=film
Data lines to define surface convection
**
RADIATION PRINT, CAVITY=topcav, SUMMARY=YES, TOTALS=YESData lines requesting cavity radiation surface variable outputRADIATION FILE, CAVITY=topcav, FREQUENCY=4
Data lines requesting cavity radiation surface variable outputNODE PRINTData lines requesting nodal output such as temperaturesEL PRINTData lines requesting element output such as heat fluxEND STEP
*************
** Step 2
*************
STEPHEAT TRANSFER, STEADY STATEData line to define incrementationRADIATION VIEW FACTOR, OFFCFLUX, OP=NEWDFLUX, OP=NEWEND STEP