Contact Controls for General Contact in Abaqus/Explicit
Contact controls for the general contact algorithm:
can be used to selectively scale the default penalty stiffness for
particular regions within a general contact domain;
can be used to control whether nodes are removed from the general
contact domain once all of the faces and edges to which they are attached have
eroded;
can be used to activate a nondefault tracking algorithm for
node-to-face contact in particular regions within a general contact domain;
can be used to control whether checks need to be performed to prevent
folds in general contact surfaces from inverting on themselves;
can be used to modify the default initial overclosure resolution
method for one or more pairs of surfaces in the general contact domain; and
can be used to modify the default contact thickness reduction checks.
The general contact algorithm uses a penalty method to enforce the contact
constraints (see
Contact Constraint Enforcement Methods in Abaqus/Explicit
for more information). The “spring” stiffness that relates the contact force to
the penetration distance is chosen automatically by
Abaqus/Explicit,
such that the effect on the time increment is minimal yet the allowed
penetration is not significant in most analyses. Significant penetrations may
develop in an analysis if any of the following factors are present:
Displacement-controlled loading
Materials at the contact interface that are purely elastic or stiffen
with deformation
Deformable elements (especially membrane and surface elements) that have
relatively little mass of their own and are constrained via methods other than
boundary conditions (for example, connectors) involved in contact
Rigid bodies that have relatively little mass or rotary inertia of their
own and are constrained via methods other than boundary conditions (for
example, connectors) involved in contact
See
The Hertz contact problem
for an example in which the first two of these factors combine such that the
contact penetrations with the default penalty stiffness are significant.
You can specify a scale factor by which to modify penalty stiffnesses for
specified interactions within the general contact domain. This scaling may
affect the automatic time incrementation. Use of a large scale factor is likely
to increase the computational time required for an analysis because of the
reduction in the time increment that is necessary to maintain numerical
stability (see
Contact Constraint Enforcement Methods in Abaqus/Explicit
for further discussion).
The user-specified (variable) mass scaling does not take into account the
effect of contact when it computes the necessary increase of mass. In general,
this effect is not significant as the default penalty stiffness will decrease
the stable time increment only by very small amounts. However, if high penalty
scale factors are specified, the stable time increment could be reduced
significantly despite the specified mass scaling.
The surface names used to specify the regions where nondefault penalty
stiffness should be assigned do not have to correspond to the surface names
used to specify the general contact domain. In many cases the contact
interaction will be defined for a large domain, while a nondefault penalty
stiffness will be assigned to a subset of this domain. If the surfaces to which
a nondefault penalty stiffness is assigned fall outside the general contact
domain, the controls assignment will be ignored. The last assignment will take
precedence if the specified regions overlap.
Control of Nodal Erosion
You can control whether contact nodes remain in the contact domain after all
the surrounding faces and edges have eroded due to element failure. By default,
these nodes remain in the contact domain and act as free-floating point masses
that can experience contact with faces that are still part of the contact
domain. You can specify that nodes of element-based surfaces should erode
(i.e., be removed from the contact domain) once all contact faces and contact
edges to which they are attached have eroded. Nodes that you include in the
contact domain only with node-based surfaces are never removed from the contact
domain.
Computational cost can increase as a result of free-flying nodes if nodal
erosion is not specified, particularly for analyses conducted in parallel. The
increased computational cost is related to the likelihood of free-flying nodes
moving far away from the elements that remain active, which stretches the
volume of the contact domain and thereby tends to increase contact search costs
as well as the cost of communication between processors in parallel analysis.
However, contact involving free-flying nodes can contribute significant
momentum transfer in some cases, which will not be accounted for if nodal
erosion is specified.
Activating the Nondefault Tracking Algorithm for Node-to-Face Contact
A nondefault contact tracking algorithm is available that utilizes more
local topological and geometric information in tracking contact between nodes
and faces. This algorithm may lead to more robust contact tracking in certain
modeling situations, for instance during the inflation event of a folded
air-bag.
The tracking algorithm is activated on a surface-by-surface basis. You must
specify the surface name for which the tracking algorithm needs to be
activated. All contact interactions in the contact domain in which nodes of the
specified surface contact faces belonging to either the surface itself
(self-contact) or faces belonging to any other surface (for which node-to-face
contact has not been excluded) will be tracked using the nondefault
node-to-face tracking scheme.
The surface names used to specify the regions where the nondefault tracking
algorithm should be used do not have to correspond to the surface names used to
specify the general contact domain. In many cases the contact interaction will
be defined for a large domain, while the nondefault tracking algorithm will be
assigned to a subset of this domain. If the surfaces for which the nondefault
tracking algorithm needs to be activated fall outside the general contact
domain, the controls assignment is ignored.
Activating the Fold Inversion Check
If a general contact surface contains sharp folds, significant loading
events (for example, those encountered during the inflation of a folded airbag)
may cause one or more of the folds to invert. Inversion is most likely to occur
at a fold where edge-to-edge contact has not been activated on the edges of the
faces forming the fold. The presence of edge-to-edge constraints usually
prevents a fold from inverting. Inversion of a fold, in the absence of
edge-to-edge contact constraints, may induce errors in the node-to-face contact
tracking algorithm and may result in a node that was being tracked on a face
that forms part of an inverted fold getting “snagged” on the wrong side of the
tracked face. To avoid such situations, it may be desirable to activate the
fold inversion check for models containing sharp folds. The fold inversion
check detects situations where a fold is about to invert and applies a force
field to the faces forming the fold to prevent the fold from inverting.
The fold inversion check is activated on a surface-by-surface basis. You
must specify the surface name for which the fold inversion check needs to be
activated. If activated for a particular surface, the fold inversion check
applies to all folds within that surface.
The surface names used to specify the regions where the fold inversion check
should be activated do not have to correspond to the surface names used to
specify the general contact domain. In many cases the contact interaction will
be defined for a large domain, while the fold inversion check will be activated
in a subset of this domain. If the surfaces for which the fold inversion check
needs to be activated fall outside the general contact domain, the controls
assignment is ignored.
Control of Initial Overclosure Resolution
By default,
Abaqus/Explicit
automatically adjusts the positions of surfaces to remove small initial
overclosures that exist in the general contact domain in the first step of a
simulation. Conflicting adjustments from separate contact definitions, boundary
conditions, tie constraints, and rigid body constraints can cause incomplete
resolution of initial overclosures. Initial overclosures that are not resolved
by repositioning nodes are stored as initial contact offsets to avoid large
contact forces at the beginning of an analysis.
Alternatively, in certain situations it may be desirable to avoid nodal
adjustments altogether between a pair of surfaces and to treat all initial
overclosures between the surfaces as temporary contact offsets. You can then
specify the surfaces for which the initial overclosures should not be resolved
by nodal adjustments and which should instead be stored as offsets.
Effect of Control of Initial Overclosure Resolution with Edge-to-Edge Interactions
Contact offsets are associated with individual node-facet and edge-edge combinations. Upon
sliding, Abaqus/Explicit attempts to transfer contact offsets to different node-facet or edge-edge pairings, as
appropriate. However, a contact offset may not be maintained (that is, may become zero)
upon sliding for some cases involving multiple contacts for individual nodes or edges or
surfaces with corners. Limitations causing discontinuities in the value of a contact
offset across increments, which are more likely for edge-to-edge contact than
node-to-surface contact, can locally degrade a solution, cause a solution to depend on the
number of processors used, or cause an analysis to exit. These limitations can be avoided
by more careful positioning of surface nodes by your preprocessor or, in many cases,
allowing strain-free adjustments to occur.
Control of Contact Thickness Reduction Checks
By default, the general contact algorithm requires that the contact
thickness does not exceed a certain fraction of the surface facet edge lengths
or diagonal lengths. This fraction generally varies from 20% to 60% based on
the geometry of the element and whether the element is near a shell perimeter.
The general contact algorithm will scale back the contact thickness
automatically where necessary without affecting the thickness used in the
element computations for the underlying elements.
To check whether the thickness needs to be reduced in any particular region
in the model, the contact algorithm first assigns the full thickness to each
contact node, represented by a sphere centered at the node with a diameter
equal to the thickness. Next, the thickness is reduced so that the spheres do
not overlap with any neighboring facets that are not attached directly to the
node, preventing spurious self-contact from developing. Then, the nodes on the
perimeter of shells are moved a maximum of 50% of the facet size in the plane
of the facet away from the perimeter to eliminate the “bull-nose” effect that
occurs with the contact pair algorithm (see
Assigning Surface Properties for Contact Pairs in Abaqus/Explicit).
If the thickness of the shell perimeter nodes is greater than twice the maximum
perimeter offset, a final thickness reduction is performed to eliminate the
remainder of the “bull-nose.”
If the default thickness reductions are unacceptable in particular regions
of the model, you can exclude self-contact for those regions via contact
exclusion definitions (see
About General Contact in Abaqus/Explicit)
and activate a control for the contact thickness reduction checks.
Consideration of Shell and Beam Thickness Offsets
During a contact analysis, the reference surface of shell and beam elements
may be offset from the actual point of contact. Additional accuracy can be
achieved by optionally accounting for offsets in slip computations and
generating nodal contact moments such that the effective point of action of the
contact force is at the desired location, as discussed in
Moment Associated with Frictional Force
and
Moment Associated with Normal Force.
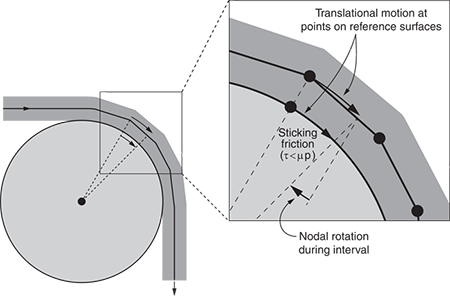
Moment Associated with Frictional Force
Figure 1
shows an example in which the non-default option to consider structural
rotation terms should be activated to improve slip increment calculations (and,
therefore, achieve proper enforcement of the sticking conditions) and to
generate nodal contact moments to account for the fact that nodes are offset
from the point of contact with a roller due to shell thickness.
As shown in
Figure 1,
some difference in tangential motion between the two reference surfaces should
exist due to rotation of the thickness offset. A shell node in the sticking
contact region should have slightly larger incremental displacement than that
of the point of contact on the roller because the shell nodes are farther from
the rotational axis, which will occur only if the non-default option to
consider structural rotation terms in contact calculations is specified.
Effect of shell thickness on slip increment.
In the same example, applying a contact nodal moment together with the
contact nodal forces at the shell node, as shown in
Figure 2,
causes the effective point of action of the contact force on the shell to act
at the point of contact with the roller, such that this force directly opposes
the contact force acting on the roller, as desired. Such contact nodal moments
are generated only if the non-default option to consider structural rotation
terms in contact calculations is specified.
Nodal moment associated with frictional constraint.
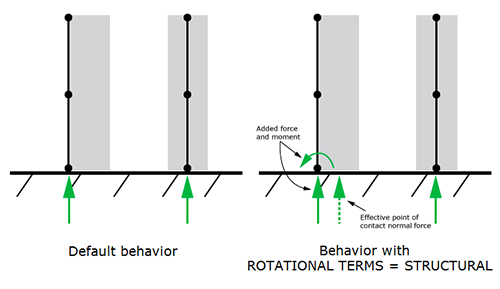
Moment Associated with Normal Force
Figure 3
and
Figure 4
show another example in which it may be important to specify the non-default
option to consider structural rotation terms in contact calculations. The
contact nodal moment is associated with contact normal force and shell offset
in this example. The center of action of the contact force acting on the body
modeled with shell elements should be independent of whether the reference
surface is offset from the center of the shell (see
Figure 3).
By default, the contact algorithm applies a nodal contact force without
applying a nodal contact moment, as shown on the left side of
Figure 4.
However, with structural rotation terms accounted for in contact calculations,
contact nodal moments are generated for the case with the reference surface
offset from the midsurface, as shown on the right side of
Figure 4,
such that the effective point of the contact force acting on the shell (with
combined effects of the nodal force and nodal moment) is at the desired
location.
Ideal effective point of contact force with and without shell
offset. Effect of nodal moment in improving the effective point of contact for
shell offset case.