Abaqus/Explicit
provides two algorithms for modeling contact and interaction problems: the
general contact algorithm and the contact pair algorithm. See
About Contact Interactions
for a comparison of the two algorithms. This section describes how to define
contact pairs with surfaces for contact simulations in
Abaqus/Explicit.
Contact pairs in
Abaqus/Explicit:
are part of the history definition of the model and can be created,
modified, and removed from step to step (unlike
Abaqus/Standard,
where contact pairs are model data);
use sophisticated tracking algorithms to ensure that proper contact
conditions are enforced efficiently;
can be used simultaneously with the general contact algorithm (that is, some interactions can
be modeled with contact pairs, while others are modeled with the general contact
algorithm);
can be formed using a pair of rigid or deformable surfaces or a single
deformable surface;
do not require surfaces with matching meshes;
cannot be formed with one two-dimensional surface and one
three-dimensional surface; and
cannot be used for self-contact where the surface is composed of both
first-order elements and second-order elements.
Define contact between a single surface and itself by specifying only a
single surface or by specifying the same surface twice.
Limitations with Self-Contact
The following limitations are enforced for a contact pair with self-contact:
The balanced main-secondary contact algorithm will always be used for the contact pair (a
nondefault weighting factor cannot be specified for the contact pair).
A contact thickness must be considered for self-contact surfaces on shell or membrane elements
(see Element-Based Surface Definition); that is,
a zero surface thickness (see Forcing Zero Surface Thickness and Offset)
causes Abaqus/Explicit to issue an error message. By default, the contact thickness is equal to the
current thickness.
A specialized finite-sliding tracking algorithm must be used. The use of
the small-sliding contact formulation is not supported and causes
Abaqus/Explicit
to issue an error message.
Contact will be recognized between any node on a self-contact surface and any other point on
the same surface, including either side of shells or membranes (that is, self-contact
on shells and membranes is independent of the face identifier specified in the surface
definition).
Removing and Adding Contact Pairs
Removal and addition of contact pairs:
can be used to simulate complicated forming processes where multiple
tools need to interact with the workpiece at different stages;
can be used to extend surfaces to prevent one surface from sliding off
another;
can result in significant computational savings by eliminating
unnecessary contact searches; and
can be used to change the definition of a contact pair.
Adding Contact Pairs
By default, the contact pairs specified are added to the list of active
contact pairs in the model.
Initial penetrations should be avoided for contact pairs introduced after the first step, as
large nodal accelerations and severe element distortions can result (see Contact Initialization for Contact Pairs in Abaqus/Explicit). Redefining a contact pair by deleting it and
adding it in the same step can also lead to problems, because the “state” information
associated with the secondary nodes in contact will be reinitialized. For example, a
penalty contact secondary node with a penetration past the midsurface of a double-sided
main surface would be allowed to pass through the main surface if the contact state were
reinitialized.
Removing Contact Pairs
Removal of contact pairs is a useful technique for simulating complicated
forming processes where multiple tools will contact the same workpiece.
Removing a contact pair once it is no longer needed eliminates the need to
monitor the contact conditions and reduces the cost of the simulation.
General Restrictions on Surfaces Used in Contact Pairs
The following general restrictions (in addition to those discussed in
Element-Based Surface Definition)
apply to all surfaces used in contact pairs:
The surface normals of a surface must point toward the other surface
that it may contact except when the surface is double-sided, as discussed
below.
The following restrictions apply to the surfaces forming a kinematic contact
pair:
Rigid surfaces must always be the main surface.
Secondary surfaces must be part of a deformable body.
A node-based surface can be used only as a secondary surface.
The following restrictions apply to the surfaces forming a penalty contact
pair:
Analytical rigid surfaces must always be the main surface.
A node-based surface can be used only as a secondary surface.
Orienting the Surface's Normal
The orientation of a surface's normal can be critical for the proper detection of contact between
two contacting surfaces. At the point of closest proximity the normals of a single-sided
main surface forming the contact pair should always point toward the secondary surface.
If, in the initial configuration of the model, a single-sided main surface's normal points
away from its secondary surface, Abaqus/Explicit will detect that the secondary surface penetrates the main surface. Abaqus/Explicit will attempt to resolve this initial overclosure of the contact pair with strain-free
displacements before the start of the simulation (see Contact Initialization for Contact Pairs in Abaqus/Explicit). Abaqus/Explicit may have difficulty with the simulation if the overclosure is too severe. In most of
these cases the analysis will terminate immediately, and an error message about severely
distorted elements will be issued.
You must give particular attention to checking that analytical rigid
surfaces or single-sided surfaces created on shell, membrane, or rigid elements
have the proper orientation.
The proper and improper orientation of a rigid and deformable surface is
shown in
Figure 1.
Example of proper and improper surface orientation with a rigid
surface.
It is not necessary for the normals of all of the underlying shell or
membrane elements to have a consistent positive orientation for a double-sided
surface: if possible,
Abaqus/Explicit
will define the surface such that its facets have consistent normals, even if
the underlying elements do not have consistent normals. The facet normals will
be the same as the element normals if the element normals are all consistent;
otherwise, an arbitrary positive orientation is chosen for the surface. For
double-sided surfaces the positive orientation is significant only with respect
to the sign of the contact pressure output variable, CPRESS, as discussed in
Element-Based Surface Definition.
Defining a Continuous Surface
A contact pair surface cannot be made up of two or more disconnected
regions. The definition of analytical rigid surfaces automatically ensures that
these surfaces are continuous. However, care must be taken to define surfaces
formed with elements so that they are continuous across element edges in
three-dimensional models or through nodes in two-dimensional models. This
continuity requirement has several implications for what constitutes a valid or
invalid surface definition. In two dimensions the surface must be either a
simple, nonintersecting curve with two terminal ends or a closed loop.
Figure 2
shows examples of valid and invalid two-dimensional surfaces for use in contact
pairs.
Valid and invalid 2D surfaces.
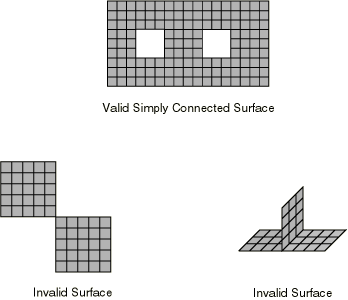
In three dimensions an edge of an element face belonging to a valid surface
may be either on the perimeter of the surface or shared by one other face. Two
element faces forming a contact pair surface cannot be joined just at a shared
node; they must be joined across a common element edge. An element edge cannot
be shared by more than two surface facets.
Figure 3
illustrates valid and invalid three-dimensional surfaces for use in contact
pairs.
Valid and invalid 3D surfaces.
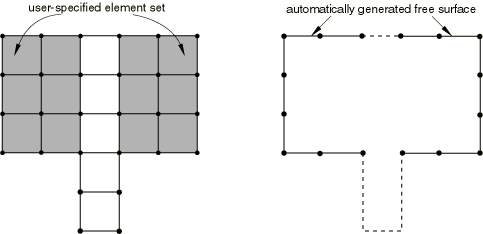
The continuity requirement applies to both automatically generated free
surfaces and surfaces defined with element face identifiers (see
Element-Based Surface Definition).
Figure 4
shows an automatically generated free surface resulting from the specification
of an element set consisting of two disjointed groups of elements. The
resulting surface is not continuous since it is composed of two disjoint open
curves.
Automatic free surface generation.
Restrictions for Two-Dimensional Contact Simulations
The following restrictions apply when defining a contact simulation for
two-dimensional (planar) or axisymmetric problems:
A contact pair cannot involve a planar surface and an axisymmetric
surface. This restriction applies only to deformable and element-based rigid
surfaces.
Defining a contact pair that contains two surfaces formed by planar
elements of different sizes in the out-of-plane direction (“depth”) is not
recommended and will result in a warning message. In such a case frictional
stresses are calculated based on a weighted average depth, with the weighting
for the first surface equal to the user-specified contact surface weighting
factor. The out-of-plane thickness for two-dimensional beam element-based
surfaces is always assumed to be one. As a result, the contact pressure acting
on such a surface can be considered as a line force as well.
When more than one contact pair involves contact between the same rigid
surface formed by planar elements and different planar deforming surfaces, the
deforming surfaces must all have the same depth; otherwise, a warning message
will be issued. The depth value used for calculating contact stresses will then
be taken from one of these deforming surfaces, but this choice cannot be
predicted.
Limitations in Contact Simulations with Three-Dimensional Beam and Truss Elements
Element-based surfaces cannot be formed on three-dimensional beam or truss elements, so
node-based surfaces must be used to define a surface on these elements. Because a node-based
surface must be used, a surface on three-dimensional beam or truss elements must always form
the secondary surface in a pure main-secondary contact pair. Therefore, it is not possible
to have two three-dimensional beam or truss structures contact each other.
Output
You can write the contact surface variables associated with the interaction of contact pairs to
the Abaqus output database (.odb) file. The surface variables for a mechanical
contact analysis include contact pressure and force, frictional shear stress and force,
relative tangential motion (slip) of the surfaces during contact, whole surface resultant
quantities (that is, force, moment, center of pressure, and total area in contact), the
status of bonded nodes, and the maximum torque transmitted about the
z-axis of axisymmetric elements.
The generic variables CSTRESS,
CFORCE,
FSLIP, and
FSLIPR are valid field output requests
for Abaqus/Explicit.
The algorithm used to establish and evolve local tangent directions for
contact pairs is described in
Local Tangent Directions for Contact.
Unlike general contact, previously accumulated slip components for contact
pairs, FSLIP1 and FSLIP2, are not resolved into the new local system before incremental
contributions are added to them.
Displacement field output (U) for the entire model is written to the output database
automatically when any of the contact field output variables are requested.
History Output
Several whole surface contact variables are available as history output.
These variables record the contact state of a surface as a set of force (CFN, CFS, and CFT) and moment (CMN, CMS, and CMT) resultants with respect to the origin. Additional variables
give the center of pressure (XN, XS, and XT) on the surface (defined as the point closest to the centroid
of the surface that lies on the line of action of the resultant force for which
the resultant moment is minimal). The last letter of each variable name (except
the variable CAREA) denotes which contact force distribution on the surface is
used to calculate the resultant: the letter N denotes that the normal contact
forces are used to derive the resultant quantity; the letter S denotes that the
shear contact forces are used to derive the resultant quantity; and the letter
T denotes that the sum of the normal and shear contact forces are used to
derive the resultant quantity. These history output variables will be written
twice to the output database once for each surface involved in the contact
pair.
Each total moment output variable will not necessarily equal the cross
product of the respective center of force vector and resultant force vector.
Forces acting on two different nodes of a surface may have components acting in
opposite directions, such that these nodal force components generate a net
moment but not a net force; therefore, the total moment may not arise entirely
from the resultant force. The center of force output variables tend to be most
meaningful when the surface nodal forces act in approximately the same
direction.
The total area in contact at a given time can be requested using output
variable CAREA, defined as the sum of all the facets where there is contact
force. The contact area reported by CAREA is generally slightly larger than the true contact area for
reasonably meshed contact surfaces; therefore, interpretation of CAREA should be done with care. The discrepancy between the CAREA output and the true contact area decreases as the mesh density
increases. Using contact inclusions or exclusions to limit CAREA output to smaller contact surfaces may also reduce the
discrepancy in some cases. Since the CAREA output is an approximation of the true contact area, deriving
force or stress values using this output may not yield accurate values;
requesting contact force and stress directly is the most appropriate way to
obtain accurate results.
Detailed history output on the status of bonded surfaces is available from
an
Abaqus/Explicit
simulation. Details can be found in
Breakable Bonds.
Obtaining the maximum torque That Can Be Transmitted about the z-Axis in an Axisymmetric Analysis
When modeling surface-based contact with axisymmetric (CAX) elements,
Abaqus/Explicit
can calculate the maximum torque (output variable CTRQ) that can be transmitted about the z-axis.
The maximum torque, T, is defined as
where p is the pressure transmitted across the
interface, r is the radius to a point on the interface,
and s is the current distance along the interface in the
r–z plane. This definition of
“torque” effectively assumes a friction coefficient of unity.