When surfaces are in contact they usually transmit shear as well as normal
forces across their interface. There is generally a relationship between these
two force components. The relationship, known as the friction between the
contacting bodies, is usually expressed in terms of the stresses at the
interface of the bodies. The friction models available in
Abaqus:
include the classical isotropic Coulomb friction model (see
Coulomb friction),
which in
Abaqus:
allows the friction coefficient to be defined in terms of slip
rate, contact pressure, average surface temperature at the contact point, and
field variables; and
provides the option for you to define a static and a kinetic
friction coefficient with a smooth transition zone defined by an exponential
curve;
allow the introduction of a shear stress limit,
,
which is the maximum value of shear stress that can be carried by the interface
before the surfaces begin to slide;
include anisotropic extensions of the basic Coulomb friction model;
include an option in
Abaqus/Explicit
in which the nominal friction coefficient for a contact interaction is derived
from coefficients specified as surface properties;
include a model that eliminates frictional slip when surfaces are in
contact;
include a “softened” interface model for sticking friction in
Abaqus/Explicit
in which the shear stress is a function of elastic slip;
can be implemented with a stiffness (penalty) method, a kinematic
method (in
Abaqus/Explicit),
or a Lagrange multiplier method (in
Abaqus/Standard),
depending on the contact algorithm used; and
In
Abaqus/Standard
tangential damping forces can be introduced proportional to the relative
tangential velocity, while in
Abaqus/Explicit
tangential damping forces can be introduced proportional to the rate of
relative elastic slip between the contacting surfaces (see
Contact Damping
for more information).
Including Friction Properties in a Contact Property Definition
Abaqus
assumes by default that the interaction between contacting bodies is
frictionless. You can include a friction model in a contact property definition
for both surface-based contact and element-based contact.
Changing Friction Properties during an Analysis
The methods used to change friction properties during an analysis differ
between
Abaqus/Standard
and
Abaqus/Explicit.
Changing Friction Properties during an Abaqus/Standard Analysis
It is possible to remove, to modify, or to add a friction model that does
not involve a user subroutine to a contact property definition in any
particular step of an
Abaqus/Standard
simulation. In some models, such as shrink-fit contact interference problems,
friction should not be added until after the first steps have been completed.
In other models friction might be removed or lowered to represent the
introduction of a lubricant between the bodies.
You must identify which contact property definition or contact element set
is being changed.
Specifying the Time Variation of the Change in Friction Properties
You can specify an amplitude curve (see
Amplitude Curves)
to define the time variation of changes in friction coefficients and, if
applicable, allowable elastic slip (see
Stiffness Method for Imposing Frictional Constraints in Abaqus/Standard
below) throughout the step. If you do not specify an amplitude curve, changes
in these friction properties are either applied immediately at the beginning of
the step or ramped up linearly over the step, depending on the default
amplitude variation assigned to the step (see
Defining an Analysis),
with some exceptions as described below. For many step types the default
transition type is a linear ramping from old to new values, which helps avoid
convergence problems that can occur upon sudden changes in friction properties.
Amplitude curves used to control variations in friction properties are
subjected to the following restrictions:
a tabular or smooth step amplitude definition must be used,
only amplitudes with monotonically increasing values between 0.0 and
1.0 are accepted, and
the amplitude must be defined in terms of step time and using relative
magnitudes.
The value of a friction coefficient or allowable elastic slip in effect at
a given time is typically equal to the value of the property at the start of
the step plus the current amplitude value times the anticipated change in
property value over the step. Variations in friction properties must consider
the following:
Changes in the type of frictional constraint enforcement method
(penalty or Lagrange multiplier methods), changes between a “rough” friction
model and a finite friction coefficient, and changes to friction properties
other than the friction coefficient or allowable elastic slip always occur at
the beginning of a step.
If a friction coefficient is dependent on slip rate, contact pressure,
average surface temperature at the contact point, or field variables, the
estimate of the final value of the friction coefficient for the step (which is
used in calculating the anticipated change in the friction coefficient over the
step) assumes that the current slip rate, contact pressure, etc. will remain in
effect at the end of the step.
If a friction coefficient is changed during the first step of an
analysis, its value at the start of the step is equal to zero for this
calculation, regardless of the original friction definition in the model.
Changes in allowable elastic slip always occur at the beginning of a
step when an exponential-decay friction model is used or when frictional
properties are changed during the first general step or during a steady-state
transport step that is preceded by a step type other than steady-state
transport.
Resetting the Frictional Properties to Their Default Values
You can reset the frictional properties of the specified contact property
definition or element set to their original values.
Changing Friction Properties during an Abaqus/Explicit Analysis
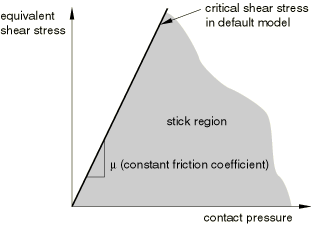
The basic concept of the Coulomb friction model is to relate the maximum
allowable frictional (shear) stress across an interface to the contact pressure
between the contacting bodies. In the basic form of the Coulomb friction model,
two contacting surfaces can carry shear stresses up to a certain magnitude
across their interface before they start sliding relative to one another; this
state is known as sticking. The Coulomb friction model defines this critical
shear stress, ,
at which sliding of the surfaces starts as a fraction of the contact pressure,
p, between the surfaces ().
The stick/slip calculations determine when a point transitions from sticking to
slipping or from slipping to sticking. The fraction, ,
is known as the coefficient of friction.
For the case when the secondary surface consists of a node-based surface, the contact pressure is
equal to the normal contact force divided by the cross-sectional area at the contact node.
In Abaqus/Standard the default cross-sectional area is 1.0; you can specify a cross-sectional area
associated with every node in the node-based surface when the surface is defined or,
alternatively, assign the same area to every node through the contact property definition.
In Abaqus/Explicit the cross-sectional area is always 1.0, and you cannot change it.
The basic friction model assumes that
is the same in all directions (isotropic friction). For a three-dimensional
simulation there are two orthogonal components of shear stress,
and ,
along the interface between the two bodies. These components act in the local
tangent directions for the contact surfaces or contact elements. The local
tangent directions for contact surfaces are defined in
Contact Formulations in Abaqus/Standard,
and those for contact elements are defined in the sections describing contact
modeling with those elements.
Abaqus
combines the two shear stress components into an “equivalent shear stress,”
,
for the stick/slip calculations, where .
In addition,
Abaqus
combines the two slip velocity components into an equivalent slip rate,
.
The stick/slip calculations define a surface (see
Figure 1
for a two-dimensional representation) in the contact pressure–shear stress
space along which a point transitions from sticking to slipping.
Slip regions for the basic Coulomb friction model.
There are two ways to define the basic Coulomb friction model in
Abaqus.
In the default model the friction coefficient is defined as a function of the
equivalent slip rate and contact pressure. Alternatively, you can specify the
static and kinetic friction coefficients directly.
Using the Default Model
In the default model you define the coefficient of friction directly as
where is the equivalent slip rate, p is the contact
pressure, is the average temperature at the contact point, and is the average predefined field variable at the contact point. , , , and are the temperature and predefined field variables at points
A and B on the surfaces. Point
A is a node on the secondary surface, and point
B corresponds to the nearest point on the opposing main surface.
The temperature and field variables are interpolated along the surface at location
B. If the main surface consists of a rigid body, the temperature
and field variable at the reference node are used.
The friction coefficient can depend on slip rate, contact pressure,
temperature, and field variables. By default, it is assumed that the friction
coefficients do not depend on field variables.
The coefficient of friction can be set to any nonnegative value. A zero
friction coefficient means that no shear forces will develop and the contact
surfaces are free to slide. You do not need to define a friction model for such
a case.
Specifying Static and Kinetic Friction Coefficients
Experimental data show that the friction coefficient that opposes the
initiation of slipping from a sticking condition is different from the friction
coefficient that opposes established slipping. The former is typically referred
to as the “static” friction coefficient, and the latter is referred to as the
“kinetic” friction coefficient. Typically, the static friction coefficient is
higher than the kinetic friction coefficient.
In the default model the static friction coefficient corresponds to the
value given at zero slip rate, and the kinetic friction coefficient corresponds
to the value given at the highest slip rate. The transition between static and
kinetic friction is defined by the values given at intermediate slip rates. In
this model the static and kinetic friction coefficients can be functions of
contact pressure, temperature, and field variables.
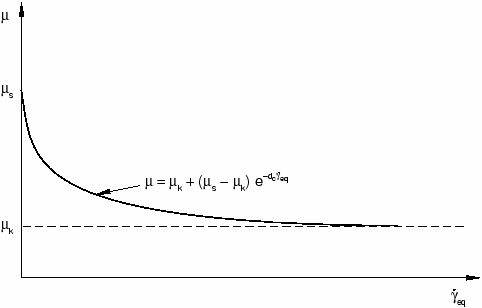
Abaqus
also provides a model to specify a static and a kinetic friction coefficient
directly. In this model it is assumed that the friction coefficient decays
exponentially from the static value to the kinetic value according to the
formula:
where
is the kinetic friction coefficient,
is the static friction coefficient,
is a user-defined decay coefficient, and
is the slip rate (see Oden, J. T. and J. A. C. Martins, 1985). This model can
be used only with isotropic friction and does not allow dependence on contact
pressure, temperature, or field variables. There are two ways of defining this
model.
Providing the Static, Kinetic, and Decay Coefficients Directly
You can provide the static friction coefficient, the kinetic friction
coefficient, and the decay coefficient directly (see
Figure 2).
Exponential decay friction model.
Using Test Data to Fit the Exponential Model
Alternatively, you can provide test data points to fit the exponential
model. At least two data points must be provided. The first point represents
the static coefficient of friction specified at ,
and the second point, (,
)
(shown in
Figure 3),
corresponds to an experimental measurement taken at a reference slip rate
.
An additional data point can be specified to characterize the exponential
decay. If this additional data point is omitted,
Abaqus
will automatically provide a third data point, (,
), to
model the assumed asymptotic value of the friction coefficient at infinite
velocity. In such a case is
chosen such that .
Exponential decay friction model specified with test data
points.
Deriving Friction Coefficients from Quantities Specified as Surface Properties
In
Abaqus/Explicit
you can establish friction coefficients as mathematical combinations of
coefficients specified as surface properties. For example, you can assign a
particular friction coefficient to a surface associated with all steel parts,
you can assign a second friction coefficient to a surface associated with all
rubber parts, and likewise for other materials. These surface-based friction
coefficients apply to interactions between the same material. A combinatorial
rule is used to determine friction coefficients for interactions between
different materials. You can override approximate friction coefficients
computed in this manner by the traditional approach of assigning friction
coefficients as contact property assignments based on combinations of surfaces.
The combinatorial approach reduces the required user input. For example, a
simulation involving six materials could involve contact interactions with 21
unique material combinations, as shown in
Figure 4.
For simulations involving many materials, it may suffice to
determine approximate friction
coefficients for contact between like surfaces (corresponding to entries 1
through 6 of the table of
Figure 4)
and a subset of other surface combinations from experiments or available
references; and
allow a combinatorial rule to
determine friction coefficients for the remaining surface combinations, at
least for early stages of a design.
Example with six materials and 21 unique combinations of two
materials in contact.
Abaqus/Explicit
uses the equation
where
to compute the friction coefficient, ,
for an interaction between surfaces A and
B if
and are assigned as surface properties to the respective
surfaces. With this combinatorial rule,
is at most
times greater than the smaller of the two surface-based friction coefficients.
The default value of
is 0.3.
Consider an example with ,
,
and .
The default combinatorial rule gives ,
,
and .
For example, you may choose to override the value of
using the traditional contact property assignment approach.
You can specify an optional equivalent shear stress limit,
,
so that, regardless of the magnitude of the contact pressure stress, sliding
will occur if the magnitude of the equivalent shear stress,
,
reaches this value (see
Figure 5).
A value of zero is not allowed.
Slip regions for the friction model with a limit on the critical shear
stress.
This shear stress limit is typically introduced in cases when the contact
pressure stress may become very large (as can happen in some manufacturing
processes), causing the Coulomb theory to provide a critical shear stress at
the interface that exceeds the yield stress in the material beneath the contact
surface. A reasonable upper bound estimate for
is ,
where
is the Mises yield stress of the material adjacent to the surface; however,
empirical data are the best source for .
Limitations with the Shear Stress Limit
In
Abaqus/Explicit
a shear stress limit cannot be used when a contact pair uses a node-based
surface as one of the surfaces.
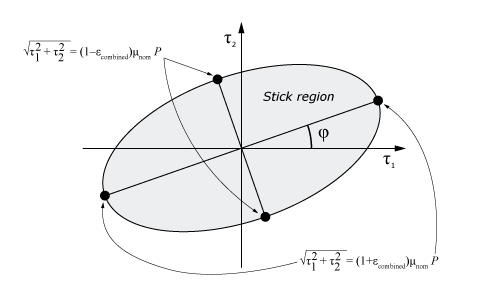
Anisotropic Friction with Directional Preference as a Surface Property
You can specify an anisotropic friction model in
Abaqus/Explicit
for which directional preferences are specified as surface properties, while
the nominal, or average, friction coefficient is specified as a contact
interaction property in the same manner as for isotropic friction. The
resulting critical contact shear stress surface is elliptical in the
–
plane, as shown in
Figure 6.
Points on the critical shear stress surface satisfy the equation:
where
represents the combined effects of surface-based directional preferences (and
these combined effects evolve as the relative surface orientations change),
is the specified nominal (average) friction coefficient, and
is the contact pressure. Maximum and minimum values of
,
corresponding to directions along the major and minor axes of the critical
shear stress surface, are
and .
Critical shear stress surface for anisotropic friction.
is the frictional directional preference factor. It is a unitless parameter
that can range from –1.0 to 1.0 and is a measure of the eccentricity of the
scaling ellipse. The most commonly used eccentricity measure for ellipses is
(see
Figure 7).
The relationship between
and
is:
Geometrical quantities for an ellipse.
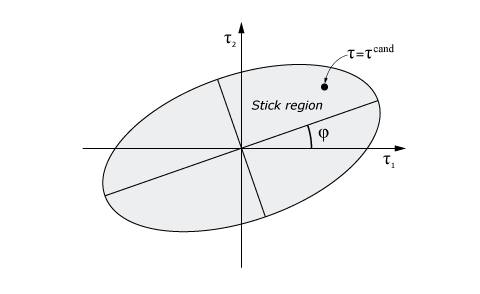
The critical contact shear stress surface influences the friction algorithm
as follows:
Abaqus/Explicit
computes a candidate contact shear stress necessary to enforce stick
conditions:
If
lies on or within the critical shear stress surface, as shown in
Figure 8,
Abaqus/Explicit
accepts the candidate contact shear stress as the current contact shear stress,
such that stick conditions are in effect.
Example of candidate contact shear stress within the sticking
region for anisotropic friction.
Otherwise, if
lies outside the critical shear stress surface,
Abaqus/Explicit
sets the contact shear stress equal to
on the critical shear stress surface where the normal to the critical shear
stress surface passes through ,
as shown in
Figure 9,
and sets the direction of incremental slip to be normal to the critical shear
stress surface.
Example of candidate contact shear stress outside of the sticking
region for anisotropic friction.
can be thought of as a scaling ellipse calculated as a weighted average of
surface-based scaling ellipses:
where the weight factors sum to unity ().
and
are scaling ellipses representing directional preferences of respective
surfaces at a contact location. The maximum and minimum principal values of
each scaling ellipse are of the form
and ,
respectively. A lack of directional preference corresponds to
.
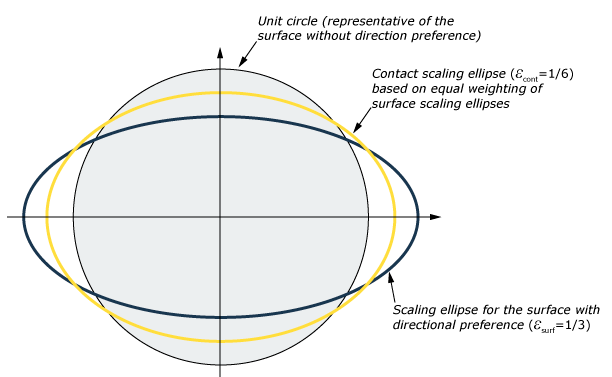
If both surfaces of a contact interaction contribute directional preference
to the frictional behavior, the shape of the
scaling ellipse evolves as the (relative) orientations of the contacting
surfaces change. For example, for contact between like surfaces with equal
weighting factors ():
where
and
is the angle between major axes of the surface scaling ellipses across the
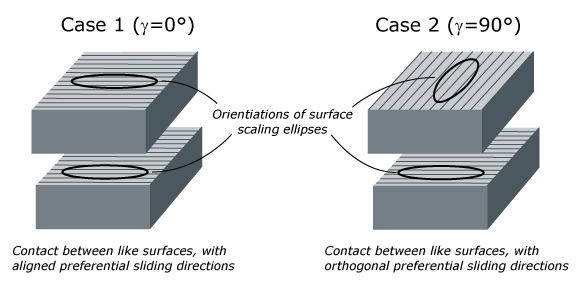
contact interface. Consider the following specific cases for contact between
like surfaces:
:
This corresponds to aligned directional preferences of contacting surfaces, as
shown in Case 1 of
Figure 10
and
Figure 11.
In this situation
and .
:
This corresponds to orthogonal directional preferences of contacting surfaces,
as shown in Case 2 of
Figure 10
and
Figure 11.
In this situation opposing direction preferences of the surfaces cancel each
other, such that
and
corresponds to a unit circle.
:
and the major axis of
bisects the major axes of the respective surface scaling ellipses).
Examples of contact between like surfaces with directional preferences
aligned (Case 1) and orthogonal (Case 2). Scaling ellipse combinations when directional preferences of like
surfaces are aligned (Case 1) and orthogonal (Case 2).
Weighting Methods for Combining Preferential Direction Effects of Surfaces for Anisotropic Friction
Abaqus/Explicit
provides three options for computing weight factors for determination of
.
for all cases with .
For cases with ,
is established according to one of the following three weighting methods (and
):
Balanced weighting, in which
.
-proportional
weighting, in which .
Maximum--dominant
weighting, in which
if
and
if .
Consider a contact interaction in which only one surface introduces
directional preference, with
and .
In this case balanced weighting leads to ,
as shown in
Figure 12.
The other two weighing methods lead to
and
for this example, in which case the combined scaling ellipse is identical to
the scaling ellipse for the surface with directional preference and
.
Balanced weighting for anisotropic friction with one surface
contributing directional preference.
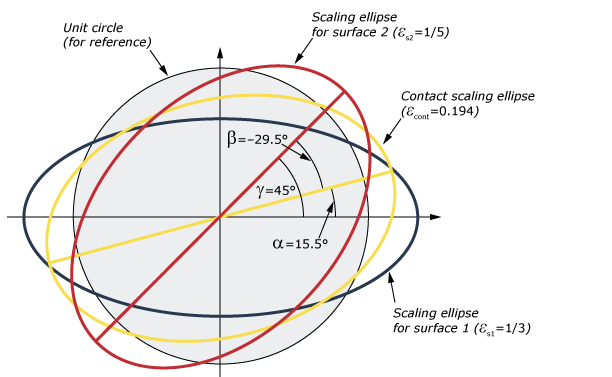
The effect of balanced weighting for a situation with
and
with a
angle between major axes of the surface scaling ellipses is represented in
Figure 13.
Weight factors for this combination of surface scaling ellipses according to
the different weighting methods are:
With balanced weighting:
and .
With -proportional
weighting:
and .
With this weighting, the contact scaling ellipse would be closer to the scaling
ellipse for surface 1 than the contact scaling ellipse for balanced weighting.
With
maximum--dominant
weighting:
and .
With this weighting, the contact scaling ellipse would be identical to the
scaling ellipse for surface 1.
Balanced weighting for anisotropic friction with both surfaces
contributing directional preference.
Defining the Friction Coefficient
As explained, the critical shear stress surface is proportional to the
average, or nominal, friction coefficient. For convenience, you can also
specify the minimum or maximum friction coefficient rather than the average
one. Internally the value will be converted to the average friction coefficient
using the following formulas:
Measure of the Eccentricity of the Scaling Ellipse
The measure of eccentricity of the scaling ellipse for each surface is
defined using the frictional directional preference factor
.
Sometimes it is useful to specify the scaling ellipse using the ratio of the
friction coefficients:
The relationship between
and
is given by the following formula:
Output of the Preferred Directions
The preferred local directions for each surface in contact can be output by
requesting the generic output variable CORIENT (with the respective vector
components CORIENT1 and CORIENT2).
Anisotropic Friction with Directional Preference Associated with Contact Orientation
Directional preference for this anisotropic friction model is specified as a
contact property and is implicitly associated with one surface of a contact
interaction. This friction model is available in
Abaqus/Standard
and is less general than the anisotropic friction model discussed in
Anisotropic Friction with Directional Preference as a Surface Property,
which allows both surfaces of a contact interaction to contribute directional
preference characteristics.
If you indicate that this anisotropic friction model should be used, you
must specify two friction coefficients, where
is the coefficient of friction in the first local tangent direction and
is the coefficient of friction in the second local tangent direction. The
critical contact shear stress surface for this friction model (see
Figure 14)
is elliptical in the –
plane, like the anisotropic friction model discussed in
Anisotropic Friction with Directional Preference as a Surface Property.
The shape of the critical contact shear stress surface remains constant in this
case, with the extreme points being
and .
The orientation of the critical contact shear stress for this friction model evolves with the
local tangent directions of the contact interaction, which are discussed in Local Tangent Directions on a Surface. For example, local tangent directions for the finite-sliding,
surface-to-surface contact formulation are established from, and evolve with, the secondary
surface of the contact interaction, so, in this example, directional preference for this
anisotropic friction model would evolve with the orientation of the secondary surface (and
would be independent of the main surface).
The size of the critical-shear-stress ellipse will change with the change in
contact pressure between the surfaces. The direction of slip,
,
is orthogonal to the critical shear stress surface.
The optional equivalent shear stress limit,
is applied to the scaled equivalent shear stress,
,
for anisotropic friction. See
Anisotropic friction
for the definition and discussion of .
Critical shear stress surface for the anisotropic friction
model.
The friction coefficients can depend on slip rate, contact pressure,
temperature, and field variables. By default, it is assumed that the friction
coefficients do not depend on field variables.
Preventing Slipping regardless of Contact Pressure
Abaqus
offers the option of specifying an infinite coefficient of friction
().
This type of surface interaction is called “rough” friction, and with it all
relative sliding motion between two contacting surfaces is prevented (except
for the possibility of “elastic slip” associated with penalty enforcement) as
long as the corresponding normal-direction contact constraints are active. In
most cases
Abaqus/Standard
uses a penalty method to enforce these tangential constraints; however, a
Lagrange multiplier method is used during general (non-perturbation) analysis
steps if the corresponding normal-direction constraints have directly enforced
“hard contact” or exponential pressure-overclosure behavior.
Abaqus/Explicit
uses either a kinematic or penalty method, depending on the contact formulation
chosen.
Rough friction is intended for nonintermittent contact; once surfaces close
and undergo rough friction, they should remain closed. Convergence difficulties
may arise in
Abaqus/Standard if
a closed contact interface with rough friction opens, especially if large shear
stresses have developed. The rough friction model is typically used in
conjunction with the no separation contact pressure-overclosure relationship
for motions normal to the surfaces (see
Using the No Separation Relationship),
which prohibits separation of the surfaces once they are closed.
When rough friction is used with the no separation relationship for hard
contact in
Abaqus/Explicit
specified with the kinematic contact method, no relative motions of the
surfaces will occur. For hard contact in
Abaqus/Explicit
specified with the penalty contact method, relative motions will be limited to
the elastic slip and penetration corresponding to the inexact satisfaction of
the contact constraints by the applied penalty forces. When softened tangential
behavior is specified in
Abaqus/Explicit
(see
Defining Tangential Softening in Abaqus/Explicit
below), the relative surface motions will be governed by the specified
softening behavior.
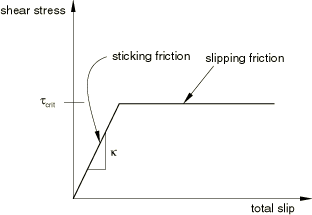
Shear Stress Versus Elastic Slip While Sticking
In some cases some incremental slip may occur even though the friction model
determines that the current frictional state is “sticking.” In other words, the
slope of the shear (frictional) stress versus total slip relationship may be
finite while in the “sticking” state, as shown in
Figure 15.
Elastic slip versus shear traction relationship for sticking and
slipping friction.
The relationship shown in this figure is analogous to elastic-plastic
material behavior without hardening:
corresponds to Young's modulus, and
corresponds to yield stress; sticking friction corresponds to the elastic
regime, and slipping friction corresponds to the plastic regime. A finite value
of the sticking stiffness may reflect a user-specified physical behavior or may
be characteristic of the constraint enforcement method.
Frictional constraints are enforced with a stiffness (penalty method) by
default in
Abaqus/Standard
and for the general contact algorithm in
Abaqus/Explicit;
in this case the sticking stiffness will have a finite value. An infinite
sticking stiffness, in which case the elastic slip is always zero, can be
achieved with the optional Lagrange multiplier method for imposing frictional
constraints in
Abaqus/Standard
or with the kinematic constraint method (available only for contact pairs) in
Abaqus/Explicit.
In
Abaqus/Explicit
some tangential contact damping acts on the elastic slip rate by default, as
discussed in
Contact Damping.
Tangential softening to reflect a physical behavior is available only in
Abaqus/Explicit.
Defining Tangential Softening in Abaqus/Explicit
To activate softened tangential behavior in
Abaqus/Explicit,
specify the slope of the shear stress versus elastic slip relationship
(
in
Figure 15).
User subroutine
VFRIC cannot be used in conjunction with softened tangential
behavior.
Stiffness Method for Imposing Frictional Constraints in Abaqus/Standard
The stiffness method used for friction in
Abaqus/Standard
is a penalty method that permits some relative motion of the surfaces (an
“elastic slip”) when they should be sticking (similar to the allowable elastic
slip defined with softened tangential behavior in
Abaqus/Explicit).
While the surfaces are sticking (i.e.,
for the basic isotropic Coulomb friction), the magnitude of sliding is limited
to this elastic slip.
Abaqus
continually adjusts the magnitude of the penalty constraint to enforce this
condition.
The stiffness method in
Abaqus/Standard
requires the selection of an allowable elastic slip, .
Using a large
in the simulation makes convergence of the solution more rapid at the expense
of solution accuracy (there is greater relative motion of the surfaces when
they should be sticking). Behavior in which no slip is permitted in the
sticking state is approximated more accurately by allowing only a small
.
If
is chosen very small, convergence problems may occur; in that case, it may be
better to use the Lagrange multiplier method to apply the sticking constraint
(see
Lagrange Multiplier Method for Imposing Frictional Constraints in Abaqus/Standard
later in this section).
The default value of allowable elastic slip used by Abaqus/Standard generally works very well, providing a conservative balance between efficiency and
accuracy. Abaqus/Standard calculates as a small fraction of the “characteristic contact surface length,” , and scans all of the facets of all the secondary surfaces when
calculating . Abaqus/Standard reports the value of used for each contact pair in the data (.dat) file
if you request detailed printout of contact constraint information (see Controlling the Amount of analysis input file processor Information Written to the Data File). The
allowable elastic slip is given as , where is the slip tolerance; the default value of is 0.005.
This method of calculating the allowable elastic slip is used for all
analysis procedures in
Abaqus/Standard
except steady-state transport analysis (Steady-State Transport Analysis),
in which the penalty constraint is based on a maximum allowable slip rate,
.
The maximum slip rate is calculated as
where
is the angular spinning rate and R is the radius of the
rolling structure.
If the stiffness method is used for an anisotropic friction model,
is a nominal allowable elastic slip (or slip rate). If
and
represent components of elastic slip in the
and
tangent directions, respectively, the transition from stick to slip will occur
when ,
where
is computed as
For example, if ,
the stick/slip transition will occur at .
Depending on values of
and ,
this
can be greater or smaller than .
As another example, if the “1” and “2” components of elastic slip are equal,
the stick/slip transition will occur at ,
such that the magnitude of the elastic slip, .
Cases in Which the Default Elastic Slip Value May Not Be Suitable
In certain situations the default value for the allowable elastic slip may not be suitable. For
example, secondary surfaces defined by node-based surfaces or some contact element
types, such as GAPUNI elements, have no
physical dimensions and Abaqus/Standard cannot estimate a value of . For models containing only node-based surfaces or these types of
contact elements, Abaqus/Standard first tries to use the “characteristic contact surface length” of the other contact
pairs in the model. If there are none, it calculates using all of the elements in the model and issues a warning message.
If a model contains no elements for which a characteristic length can be determined (for
example, if it contains only substructures), Abaqus/Standard has no information with which to calculate . As a result, it uses a value of 1.0 and issues a warning message. If
the contact surface face dimensions vary greatly, the average value of may be unreasonable for some contact surfaces. The elastic slip should
then be specified directly for the surfaces with a much smaller “characteristic face
dimension.”
There are two methods for modifying the allowable elastic slip. One method
is to specify
directly; the other is to specify the slip tolerance, .
Some analyses call for nondefault
or
only in specific steps (see
Changing Friction Properties during an Abaqus/Standard Analysis
above).
Specifying the Allowable Elastic Slip Directly
You can provide the absolute magnitude of
directly. Specify a reasonable value for the relative displacement that may
occur before surfaces actually begin to slip. Typically, the allowable elastic
slip is set to a small fraction (10−2–10−4) of a
“characteristic contact surface face dimension.” In a steady-state transport
analysis you can define the maximum allowable viscous slip rate,
.
The specified allowable elastic slip will be used only for the contact
pairs referencing the contact property definition that contains the friction
definition. For example, three surfaces ASURF,
BSURF, and
CSURF form two contact pairs that each refer
to their own contact property definition, as shown below.
Contact Pair
Contact Property
ASURF, BSURF
DEFAULT
CSURF, BSURF
NONDEF
0.1
In the DEFAULT contact property definition
no value for
is specified, so the allowable elastic slip used for the friction interaction
between ASURF and
BSURF would be the default value
.
In the NONDEF contact property definition a
value of 0.1 is specified for ,
which will be the allowable elastic slip used for the friction interaction
between CSURF and
BSURF.
Changing the Default Slip Tolerance
You can alter the default value of the slip tolerance,
.
This method of altering the default elastic slip is convenient if the goal is
to increase computational efficiency, in which case a value larger than the
default of 0.005 would be given, or if the goal is to increase accuracy, in
which case a value smaller than the default would be given.
Stiffness Method for Imposing Frictional Constraints in Abaqus/Explicit
The stiffness method used for friction with the general contact algorithm in
Abaqus/Explicit
and, optionally, with the contact pair method in
Abaqus/Explicit
is a penalty method that permits some relative motion of the surfaces (an
“elastic slip”) when they should be sticking (similar to the allowable elastic
slip defined with softened tangential behavior in
Abaqus/Explicit).
While the surfaces are sticking (i.e., ),
the magnitude of sliding is limited to this elastic slip.
Abaqus
continually adjusts the magnitude of the penalty constraint to enforce this
condition.
In
Abaqus/Explicit
you can choose to have contact constraints for the contact pair algorithm
enforced with the penalty method; the general contact algorithm always uses a
penalty method (see
Contact Constraint Enforcement Methods in Abaqus/Explicit).
The default penalty stiffness for frictional constraints is chosen
automatically by
Abaqus/Explicit
and is the same as would be used for normal hard contact constraints. Softening
in the normal direction does not affect the penalty stiffness used to enforce
stick conditions. If tangential softening is specified (see
Defining Tangential Softening in Abaqus/Explicit
above), the penalty stiffness will be equal to the value specified for the
slope of the shear stress versus elastic slip relationship. You can specify a
scale factor to adjust the penalty stiffness, as discussed in
Contact Controls for General Contact in Abaqus/Explicit
and
Contact Controls for Contact Pairs in Abaqus/Explicit.
Lagrange Multiplier Method for Imposing Frictional Constraints in Abaqus/Standard
In
Abaqus/Standard
the sticking constraints at an interface between two surfaces can be enforced
exactly by using the Lagrange multiplier implementation. With this method there
is no relative motion between two closed surfaces until
.
However, the Lagrange multipliers increase the computational cost of the
analysis by adding more degrees of freedom to the model and often by increasing
the number of iterations required to obtain a converged solution. The Lagrange
multiplier formulation may even prevent convergence of the solution, especially
if many points are iterating between sticking and slipping conditions. This
effect can occur particularly if locally there is a strong interaction between
slipping/sticking conditions and contact stresses.
Because of the added cost of using the Lagrange friction formulation, it
should be used only in problems where the resolution of the stick/slip behavior
is of utmost importance, such as modeling fretting between two bodies. In
typical metal forming applications or for contact of rubber components,
accurate resolution of the stick/slip behavior is not important enough to
justify the added costs of the Lagrange multiplier formulation.
Kinematic Method for Imposing Frictional Constraints in Abaqus/Explicit
By default, the contact pair algorithm in Abaqus/Explicit uses a kinematic method for imposing frictional constraints (see Contact Constraint Enforcement Methods in Abaqus/Explicit). The kinematic method applies sticking
constraints in a way similar to the optional Lagrange multiplier method in Abaqus/Standard; however, the algorithm is quite different. The value of the force required to enforce
sticking at a node is first calculated using the mass associated with the node; the
distance the node has slipped; the time increment; and additionally for softened contact,
the current value of the elastic slip and the elastic slip versus shear stress slope. For
hard contact this sticking force is that which is required to maintain the node's position
on the opposite surface in the predicted configuration. For softened contact this force is
consistent with the user-specified value for the slope of the shear stress versus elastic
slip relationship. The sticking force for each node is calculated using the mass
associated with the node, the distance the node has slipped, the shear traction-elastic
slip slope (if softened contact is specified in the tangential direction), and the time
increment. If the shear stress at the node calculated using this force is less than , the node is considered to be sticking and this force is applied to each
surface in opposing directions. If the shear stress exceeds , the surfaces are slipping and the force corresponding to is applied. In either case the forces result in acceleration corrections
tangential to the surface at the secondary node and either the nodes of the main surface
facet or the points on the analytical rigid surface that it contacts.
User-Defined Friction Model
You can define the shear stress between contacting surfaces through a user
subroutine when the friction behavior provided by
Abaqus
is not sufficient. The shear stress can be defined as a function of a number of
variables such as slip, slip rate, temperature, and field variables. You can
also introduce a number of solution-dependent state variables that you can
update and use within the friction user subroutines. You can declare a number
of properties or constants associated with your friction model and use these
values in the user subroutine.
In Abaqus/Standard, when user-defined friction is specified in procedures with
temperature unknowns, the temperatures passed into the user subroutines correspond to values
at the end of an increment at the secondary node and the corresponding point on the main.
However, there are situations where not all nodes in the contact constraint connectivity
have temperature degrees of freedom, such as in the case where only one of the secondary or
main surfaces is meshed with elements with temperature degrees of freedom while the other
surface is not. In such situations, contact only enforces mechanical constraints, and the
temperature values passed into the user subroutines are not temperature-solution variables
at the end of an increment but rather based on boundary conditions and initial conditions
(if present) in that order of precedence.
In addition to the friction user subroutines, subroutines are available for
defining the complete mechanical interaction between surfaces, including the
interaction in the normal direction as well as the frictional behavior in the
tangential direction; see
User-Defined Interfacial Constitutive Behavior
for more information.
Defining Generic Frictional Behavior
You can define a generic frictional behavior between contacting surfaces
using user subroutine
FRIC in
Abaqus/Standard.
In
Abaqus/Explicit
the generic frictional behavior for contact pairs is defined in user subroutine
VFRIC, while the generic frictional behavior for general contact
is defined in user subroutine
VFRICTION.
Abaqus
provides a simple way to specify complex dependence of friction coefficients
with user subroutines
FRIC_COEF (Abaqus/Standard)
and
VFRIC_COEF (Abaqus/Explicit).
VFRIC_COEF can be used only with general contact. These user
subroutines have a much narrower scope and are much simpler to create than user
subroutines that control all aspects of a friction model (FRIC and
VFRIC, discussed in
Defining Generic Frictional Behavior).
In addition, user subroutine
FRIC_COEF preserves heuristics built into
Abaqus/Standard
friction algorithms to assist convergence behavior; many of these built-in
heuristics are bypassed with user subroutine
FRIC.
FRIC_COEF can be used for
isotropic or anisotropic friction behavior. Friction coefficients can depend on contact
pressure, temperature, and a number of contact slip–related variables at the current time.
VFRIC_COEF is limited to
controlling a single friction coefficient per contact constraint for isotropic friction or
for the anisotropic friction model discussed in Anisotropic Friction with Directional Preference as a Surface Property. In addition to temperature and contact pressure dependence, the
friction coefficient can also depend on equivalent contact slip and contact slip
rates.
Consideration of Incremental Rotation of Shell and Beam Thickness Offsets in Abaqus/Explicit
By default, in
Abaqus/Explicit
slip increment calculations for friction do not account for the incremental
rotation of shell and beam thickness offsets, and frictional constraints do not
apply a moment to nodes offset from the contact interface due to shell or beam
thicknesses. This behavior can be modified for general contact; for details see
Consideration of Shell and Beam Thickness Offsets.
Improving Abaqus/Standard Simulations That Include Friction in the Surface Interactions
Several features of the frictional interaction of surfaces can have a strong
influence on the rate of convergence in an
Abaqus/Standard
simulation.
Unsymmetric Terms in the System of Equations
Friction constraints produce unsymmetric terms when the surfaces are sliding
relative to each other. These terms have a strong effect on the convergence
rate if frictional stresses have a substantial influence on the overall
displacement field and the magnitude of the frictional stresses is highly
solution dependent.
Abaqus/Standard
will automatically use the unsymmetric solution scheme if
or if
is pressure-dependent. If desired, you can turn off the unsymmetric solution
scheme; see
Matrix Storage and Solution Scheme in Abaqus/Standard.
No slip occurs with rough friction; the contribution to the stiffness will
be fully symmetric, and
Abaqus/Standard
will use the symmetric solution scheme by default.
Heat Generated by Frictional Interaction of Surfaces
In fully coupled temperature-displacement analysis and fully coupled
thermal-electrical-structural analysis, all dissipated mechanical (frictional)
energy is converted to heat and distributed equally between the two surfaces by
default. This behavior can be modified; for details about this and other
thermal surface interactions, see
Thermal Contact Properties.
Temperature and Field-Variable Dependence of Friction Properties for Structural Elements
Temperature and field-variable distributions in beam and shell elements can
generally include gradients through the cross-section of the element. Contact
between these elements occurs at the reference surface; therefore, temperature
and field-variable gradients in the element are not considered when determining
friction properties that depend on these variables.
Surface Interaction Variables Related to Friction
Abaqus provides output of the shear stresses at points on the secondary surface that use a
surface interaction model containing frictional properties. The shear stresses,
CSHEAR1 and
CSHEAR2, are given in the two orthogonal
local tangent directions, which are constructed on the main surface (see Contact Formulations in Abaqus/Standard). There is only one local tangent direction in
two-dimensional problems. Details about how to request contact surface variable output are
given in About Contact Pairs in Abaqus/Standard and About Contact Pairs in Abaqus/Explicit.
References
Oden, J.T., and J. A. C. Martins, “Models
and Computational Methods for Dynamic Friction
Phenomena,” Computer Methods in Applied
Mechanics and
Engineering, vol. 52, pp. 527–634, 1985.