Contact Initialization for General Contact in Abaqus/Standard
You can specify whether initial overclosures should be resolved without generating
stresses and strains or treated as interference fits that are gradually resolved over multiple
increments. You can also specify nondefault search zones that determine which nodes are
affected in the case of strain-free adjustments or interference fits.
Abaqus/Standard
initializes the contact state based on the gap or penetration state observed in
the initial geometry. Small initial contact overclosures are resolved by
default using strain-free adjustments to the positions of surface nodes. You
can define alternative contact initialization methods and then assign them to
contact interactions. For example, you can choose to have initial overclosures
for certain interactions treated as interference fits.
By default, the general contact algorithm adjusts the initial positions of surface nodes during
preprocessing to remove small initial surface overclosures without generating strains or
stresses in the model, as shown in Figure 1. These adjustments are intended to correct only minor mismatches associated with mesh
generation. Nodal adjustments are not allowed for any new contact activations at the step
level. In such cases, initial overclosures are either avoided before activation or allowed
to resolve by contact resulting in contact stresses.
Configuration of contact surfaces after strain-free adjustments to
resolve overclosure.
General contact automatically assigns main and secondary roles for contact interactions, as
discussed in Numerical Controls for General Contact in Abaqus/Standard. Abaqus/Standard calculates an overclosure tolerance based on the size of the underlying element facets on
a secondary surface. Secondary surfaces in a particular interaction are repositioned onto
the associated main surface (using strain-free adjustments) if the two surfaces are
initially overclosed by a distance smaller than the calculated tolerance. Initial gaps
between surfaces remain unchanged by default adjustments. If a portion of a secondary
surface is initially overclosed by a distance greater than the calculated tolerance, Abaqus/Standard automatically generates a contact exclusion for this surface portion and its associated
main surface. Therefore, general contact does not create interactions between surfaces (or
portions of surfaces) that are severely overclosed in the initial configuration of the
model, and these surfaces can freely penetrate each other throughout the analysis.
General contact uses the surface-to-surface contact formulation, so
penetration/gap calculations are computed as averages over finite regions;
therefore, it is possible for penetrations and gaps to be present at individual
surface nodes after the adjustments. The default adjustments will not resolve
initial crossings of two reference surfaces associated with shells or
membranes, although techniques to resolve such cases are discussed in
Assigning Contact Initializations to Shell Surfaces.
Defining Alternative Contact Initialization Methods
You can define alternative contact initialization methods if the default
behavior is not desired. For example, you may want to increase the tolerance
for deep penetrations or specify that certain openings should be adjusted to a
“just touching” status. Furthermore, some analyses call for initial
overclosures to be treated as interference fits rather than resolved with
strain-free adjustments. To modify the contact initialization behavior, you
must define one or more alternate contact initialization methods and then
identify which surface pairings are to use which methods.
You assign a name to each contact initialization method. This name is used
in the assignment of a contact initialization method to specific surface
pairings (see
Assigning Contact Initialization Methods
below).
Increasing the Search Zones for Strain-Free Adjustments
As discussed above in Default Contact Initialization Method, initial gaps and large initial overclosures between surfaces are not adjusted by the
default contact initialization methods. You can optionally specify nondefault search
distances both above and below the surfaces in an interaction; secondary surfaces that lie
within these search distances are repositioned directly onto their associated main surface
using strain-free nodal adjustments. Abaqus/Standard takes shell thickness into account when calculating these search distances.
For new activations at the step level, strain-free nodal adjustments are not allowed and
nodes on secondary surfaces are not repositioned. Instead, initial overclosures might have
to be reconciled by precise positioning before activation while initial gaps might be
resolved by establishing contact on activation with boundary motions to avoid rigid body
modes. The subsequent discussion involving strain-free nodal adjustments applies only to
the initial configuration.
Specifying a search distance above a surface is used to close small initial
gaps between surfaces. Specifying a search distance below a surface is used to
increase the default overclosure tolerance that
Abaqus/Standard
uses when performing strain-free adjustments; if you specify a search distance
smaller than the default overclosure tolerance,
Abaqus/Standard
uses the default tolerance instead. As with the default initialization
behavior, contact exclusions are created for initial overclosures that are
larger than the specified search zone.
Increasing the extent of the search zones for strain-free adjustments can
potentially increase the computational cost of an analysis. It is not generally
recommended that you specify a large search zone since this may cause mesh
distortion when nodes are repositioned over large distances.
Specifying an Initial Clearance Distance
By default, the strain-free adjustments discussed above adjust initial nodal positions such that
surfaces are “just-touching” (with zero penetration/separation). Alternatively, Abaqus/Standard can make the adjustments to achieve an initial clearance distance that you specify. The
adjustments occur only for regions that satisfy the search zone tolerances, as discussed
above. Mesh distortion can occur if large strain-free adjustments are required to achieve
the specified initial clearance distance. Because nodal adjustments are not allowed for
new activations in a step, this specification is ignored at the step level.
Alternative General Contact Initialization Methods Based on Storing Offsets
You can specify an initial clearance to apply to general contact interactions in portions of the
model where the small-sliding tracking approach is active or to interactions in heat
transfer and coupled electrical-thermal procedures that have no mechanical degrees of
freedom. Abaqus/Standard stores the difference between the specified clearance and the actual clearance (with or
without nodal adjustments) as offsets. In addition, for small sliding you can also specify
applicable contact directions during initialization.
Storing Offsets Instead of the Default Strain-Free Adjustments
By default, Abaqus/Standard resolves clearances and overclosures in general contact by adjusting the nodal
coordinates without creating strain in the model. Alternatively, you can specify
unresolved gaps and overclosures at the beginning of an analysis to store as offsets. In
this case, all gaps within the search distance above the secondary surface and
overclosures within the search distance below the secondary surface start out as a
specified zero clearance. Abaqus/Standard ignores the nondefault specification for contact interactions with the finite-sliding
tracking approach.
In situations where you specify an interference distance or an initial clearance distance,
nodal adjustments are necessary to satisfy these specified initial gap or overclosure
distances. In these situations, the specification to store additional offsets is
ignored.
Specifying Initial Clearance and/or Contact Directions Using Clearance Definitions for Small-Sliding Contact
You can refer to a named clearance definition to precisely specify initial clearances and/or
contact directions. The different modes of specifying initial clearance using a named
clearance definition carry over to defining contact initialization for general contact
interactions in portions of the model where the small-sliding tracking approach is
active or for interactions in heat transfer and coupled electrical-thermal procedures
that have no mechanical degrees of freedom. However, such a specification is ignored for
finite-sliding contact. When node numbers or node sets are specified in a named
clearance definition and they are not associated with surfaces to which the contact
initialization is eventually assigned, an error message is issued. A typical use case
involves referring to a named clearance and specifying that nodal adjustments should be
avoided.
Modeling Interference Fits
Optionally, the general contact algorithm in Abaqus/Standard can treat overclosures as interference fits. The general contact algorithm uses a
shrink-fit method to gradually resolve the interference distance over the step of the
analysis (if multiple load increments are used for the step) as shown in Figure 2, such that the fraction of the interference resolved up to and including a particular
increment approximately corresponds to the fraction of the step completed. Stresses and
strains are generated as the interference is resolved. Gradually resolving interference
over several increments improves robustness (compared to always resolving the full
interference in the first increment, which is the default for contact pairs) for cases in
which a nonlinear response occurs for “interference-fit loading.” It is generally
recommended that you do not apply other loads while the interference fit is being
resolved.
Gradual resolution of contact interference fit.
Because contact conditions are enforced in an average sense in a region around each constraint
location for the surface-to-surface contact formulation used by general contact in Abaqus/Standard, penetrations or gaps may be observed at secondary nodes when surface-to-surface
constraints are in a zero-penetration state.
Increasing the Tolerance for Interference Fits
Abaqus/Standard calculates an overclosure tolerance based on the size of the underlying element
facets on a secondary surface (see Default Contact Initialization Method above). An interference fit between two surfaces affects only those secondary
surfaces that are overclosed by a distance smaller than the calculated tolerance;
contact is ignored entirely for surfaces that are overclosed by a distance greater than
the calculated tolerance.
Optionally, you can redefine the overclosure tolerance to include larger
overclosures in the interference fit. If you specify a tolerance that is
smaller than the default calculated tolerance,
Abaqus/Standard
uses the default calculated tolerance instead.
Specifying the Interference Distance
By default, the interference distance is implied by the initial overclosure of the mesh in the
initial configuration or when surfaces are newly activated in a step; alternatively, you
can specify the interference distance in the initial configuration. In this case Abaqus/Standard first makes strain-free adjustments of nodal positions such that the initial
overclosure in the adjusted configuration corresponds to the specified interference
distance and then invokes the shrink fit method discussed above, as depicted in Figure 3. Mesh distortion can occur if large strain-free adjustments are required to achieve
the specified interference distance. Because strain-free nodal adjustments are not
allowed for new contact activations at the step level, the interference distance
specification is ignored; instead, the physical overclosure is resolved.
Treatment of a specified interference distance that differs from the
interference implied by the original mesh.
The search region for the strain-free adjustments and subsequent shrink
fit resolution is at least as large as the search region for the case discussed
previously in which the interference distance is not specified. The search
region will include overclosures at least as large as the specified
interference fit and openings at least as large as the optionally specified
search distance above a surface.
Deactivating Friction While Resolving Interference Fits
The presence of a friction model can degrade the robustness of resolving interference fits. It
is generally recommended that you temporarily deactivate friction models while Abaqus/Standard resolves interference fits. You can deactivate the friction model in the step while
interference fits are resolved using the “change friction” method discussed in Changing Friction Properties during an Abaqus/Standard Analysis.
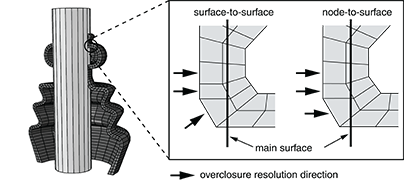
Cases in Which Interference Fit Resolution with Contact Pairs Is Preferred
Large interferences may be difficult to resolve with the surface-to-surface formulation. Using
this formulation, overclosures tend to be resolved along the secondary facet normal
directions; using the node-to-surface formulation, which is available only with the
contact pair algorithm, overclosures tend to be resolved along the main surface normal
directions. Figure 4 illustrates a case where differing normal directions lead to undesirable tangential
motion during an interference fit. In some cases it may be preferable to resolve large
initial overclosures with node-to-surface discretization using the contact pair
algorithm (see Modeling Contact Interference Fits in Abaqus/Standard).
Comparison of contact formulations in an example with a large
interference fit.
Assigning Contact Initialization Methods
You can assign contact initialization methods to selected surface pairings.
The surface names used in the assignment of contact initialization methods do not have to
correspond to the surface names used to specify the general contact domain. In many cases
nondefault contact initialization methods are assigned to a subset of the overall general
contact domain. Any contact initialization assignments for regions that fall outside of the
general contact domain are ignored. The last assignment takes precedence if the specified
interactions overlap. In the case of step-dependent contact activation, contact
initialization specified in a new step takes precedence over the methods specified in
previous steps or at the model level.
Assigning Contact Initializations to Shell Surfaces
The surfaces in a contact initialization assignment can be either single- or
double-sided. Single-sided surfaces must have consistent surface normal
orientations for adjacent faces. Strain-free adjustments will not move surface
nodes past the reference surface of the opposing surface if the assignment of a
contact initialization method is made with double-sided surfaces.
Using single-sided surfaces in the assignment of a contact initialization method for shells or
membranes provides enhanced control over contact initialization for cases in which shell
or membrane reference surfaces are initially crossed or are initially on the wrong side of
each other. Figure 5 shows examples of adjustments for nearby segments of shell surfaces. For the case shown
on the left it is assumed that single-sided surfaces with normal directions pointing away
from each other are used in the assignment of the contact initialization method. In this
case nodes are moved across the opposing reference surface during the strain-free
adjustments.
For the case shown on the right in
Figure 5
it is assumed that single-sided surfaces with normal directions pointing toward
each other are used in the assignment of the contact initialization method. In
this case an initial gap is observed between the single-sided surfaces (which
is also the case if double-sided surfaces are used in the contact
initialization assignment). No strain-free adjustments will be made by default
for openings such as this; however, if a nondefault contact initialization
method is specified with an initial opening search tolerance set to a value
exceeding the initial separation distance, strain-free adjustments will close
the gap as shown in the figure (without moving nodes past the opposing
reference surface).
Examples
The following contact initialization assignments are specified below as model or step data in a
general contact analysis with the corresponding contact initialization data specified once
at the model level:
a global assignment of shrink_fit to the
entire general contact domain;
a local assignment of shrink_fit_local to
contact between surfaces surface_A and
surface_B—the search zone is specified
explicitly to increase the default overclosure tolerance;
a local assignment of the default
Abaqus
contact initialization method to contact between
surface_C and
surface_D; and
a local assignment of sfa_pickside to
contact between double-sided surfaces surface_1
and surface_2 by specifying one side of each
surface, surface_1_TOP and
surface_2_BOTTOM, in the data lines (see bottom
left of
Figure 5).
Strain-free adjustments during contact initialization for
single-sided shell surfaces.