*INSTANCE | |
| |
Required parameters if the instance is not imported from a previous analysis
- NAME
-
Set this parameter equal to a label that will be used to refer to the instance.
- PART
-
Set this parameter equal to the name of the part being instanced.
Required parameter if the instance is to be imported once from a previous analysis
- INSTANCE
-
Set this parameter equal to the name of the instance to be imported from the previous analysis.
Required parameters if the instance is to be imported more than once from a previous analysis
- NAME
-
Set this parameter equal to a new label that will be used to refer to the instance.
- INSTANCE
-
Set this parameter equal to the old name of the instance to be imported from the previous analysis.
Required parameter if importing instances from multiple previous analyses (Abaqus/Explicit only); optional parameter if importing instances from a single previous analysis
- LIBRARY
-
Set this parameter equal to a value that specifies the previous analysis from which to import the instance. You can specify the name of the previous analysis or the name including a full path. If no path is specified, all input files and result files from the previous analyses must reside in the current (working) directory.
When importing from a single previous analysis, if the LIBRARY parameter is omitted, you must specify the job name of the previous analysis on the command line using the oldjob option (see ). If both methods are used, the LIBRARY parameter takes precedence over the command line specification.
When importing from multiple previous analyses, set this parameter equal to the job name. You should not use the oldjob option on the command line.
Data line to translate an instance
- First (and only) line
-
-
Value of the translation to be applied in the X-direction.
-
Value of the translation to be applied in the Y-direction.
-
Value of the translation to be applied in the Z-direction.
-
Data lines to translate and/or rotate an instance
- First line
-
-
Value of the translation to be applied in the X-direction.
-
Value of the translation to be applied in the Y-direction.
-
Value of the translation to be applied in the Z-direction.
Enter values of zero to apply a pure rotation.
-
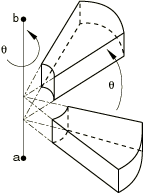
- Second line
-
-
X-coordinate of point a on the axis of rotation (see Figure 1).
-
Y-coordinate of point a on the axis of rotation.
-
Z-coordinate of point a on the axis of rotation.
-
X-coordinate of point b on the axis of rotation.
-
Y-coordinate of point b on the axis of rotation.
-
Z-coordinate of point b on the axis of rotation.
-
Angle of rotation about the axis a–b, in degrees.
If both translation and rotation are specified, translation is applied before rotation.
-