uses mesh-independent measures (either plastic displacement or
physical energy dissipation) to drive the evolution of damage after damage
initiation;
takes into account the combined effect of different damage mechanisms
acting simultaneously on the same material and includes options to specify how
each mechanism contributes to the overall material degradation; and
offers options for what occurs upon failure, including the removal of
elements from the mesh.
Figure 1
illustrates the characteristic stress-strain behavior of a material undergoing
damage. In the context of an elastic-plastic material with isotropic hardening,
the damage manifests itself in two forms: softening of the yield stress and
degradation of the elasticity. The solid curve in the figure represents the
damaged stress-strain response, while the dashed curve is the response in the
absence of damage. As discussed later, the damaged response depends on the
element dimensions such that mesh dependency of the results is minimized.
Stress-strain curve with progressive damage degradation.
In the figure
and
are the yield stress and equivalent plastic strain at the onset of damage, and
is the equivalent plastic strain at failure; that is, when the overall damage
variable reaches the value .
The overall damage variable, D, captures the combined
effect of all active damage mechanisms and is computed in terms of the
individual damage variables, ,
as discussed later in this section (see
Evaluating Overall Damage When Multiple Criteria Are Active).
The value of the equivalent plastic strain at failure,
,
depends on the characteristic length of the element and cannot be used as a
material parameter for the specification of the damage evolution law. Instead,
the damage evolution law is specified in terms of equivalent plastic
displacement, ,
or in terms of fracture energy dissipation, ;
these concepts are defined next.
Mesh Dependency and Characteristic Length
When material damage occurs, the stress-strain relationship no longer
accurately represents the material's behavior. Continuing to use the
stress-strain relation introduces a strong mesh dependency based on strain
localization, such that the energy dissipated decreases as the mesh is refined.
A different approach is required to follow the strain-softening branch of the
stress-strain response curve. Hillerborg's (1976) fracture energy proposal is
used to reduce mesh dependency by creating a stress-displacement response after
damage is initiated. Using brittle fracture concepts, Hillerborg defines the
energy required to open a unit area of crack, ,
as a material parameter. With this approach, the softening response after
damage initiation is characterized by a stress-displacement response rather
than a stress-strain response.
The implementation of this stress-displacement concept in a finite element
model requires the definition of a characteristic length,
L, associated with an integration point. The fracture
energy is then given as
This expression introduces the definition of the equivalent plastic
displacement, ,
as the fracture work conjugate of the yield stress after the onset of damage
(work per unit area of the crack). Before damage initiation
;
after damage initiation .
The definition of the characteristic length depends on the element geometry
and formulation: it is a typical length of a line across an element for a
first-order element; it is half of the same typical length for a second-order
element. For beams and trusses it is a characteristic length along the element
axis. For membranes and shells it is a characteristic length in the reference
surface. For axisymmetric elements it is a characteristic length in the
r–z plane only. For cohesive elements
it is equal to the constitutive thickness. This definition of the
characteristic length is used because the direction in which fracture occurs is
not known in advance. Therefore, elements with large aspect ratios will have
rather different behavior depending on the direction in which they crack: some
mesh sensitivity remains because of this effect, and elements that have aspect
ratios close to unity are recommended. Alternatively, this mesh dependency
could be reduced by directly specifying the characteristic length as a function
of the element topology and material orientation in user subroutine
VUCHARLENGTH (see
Defining the Characteristic Element Length at a Material Point in Abaqus/Explicit).
Each damage initiation criterion described in
Damage Initiation for Ductile Metals
may have an associated damage evolution law. The damage evolution law can be
specified in terms of equivalent plastic displacement,
,
or in terms of fracture energy dissipation, .
Both of these options take into account the characteristic length of the
element to alleviate mesh dependency of the results.
Evaluating Overall Damage When Multiple Criteria Are Active
The overall damage variable, D, captures the combined
effect of all active mechanisms and is computed in terms of individual damage
variables, ,
for each mechanism. You can choose to combine some of the damage variables in a
multiplicative sense to form an intermediate variable,
,
as follows:
Then, the overall damage variable is computed as the maximum of
and the remaining damage variables:
In the above expressions
and
represent the sets of active mechanisms that contribute to the overall damage
in a multiplicative and a maximum sense, respectively, with
.
Defining Damage Evolution Based on Effective Plastic Displacement
As discussed previously, once the damage initiation criterion has been
reached, the effective plastic displacement, ,
is defined with the evolution equation
where L is the characteristic length of the element.
The evolution of the damage variable with the relative plastic displacement
can be specified in tabular, linear, or exponential form. Instantaneous failure
will occur if the plastic displacement at failure, ,
is specified as 0; however, this choice is not recommended and should be used
with care because it causes a sudden drop of the stress at the material point
that can lead to dynamic instabilities.
Tabular Form
You can specify the damage variable directly as a tabular function of
equivalent plastic displacement, ,
as shown in
Figure 2(a).
Different definitions of damage evolution based on plastic
displacement: (a) tabular, (b) linear, and (c) exponential.
Linear Form
Assume a linear evolution of the damage variable with effective plastic
displacement, as shown in
Figure 2(b).
You can specify the effective plastic displacement, ,
at the point of failure (full degradation). Then, the damage variable increases
according to
This definition ensures that when the effective plastic displacement reaches
the value ,
the material stiffness will be fully degraded ().
The linear damage evolution law defines a truly linear stress-strain softening
response only if the effective response of the material is perfectly plastic
(constant yield stress) after damage initiation.
Exponential Form
Assume an exponential evolution of the damage variable with plastic
displacement, as shown in
Figure 2(c).
You can specify the relative plastic displacement at failure,
,
and the exponent .
The damage variable is given as
Defining Damage Evolution Based on Energy Dissipated during the Damage Process
You can specify the fracture energy per unit area, ,
to be dissipated during the damage process directly. Instantaneous failure will
occur if
is specified as 0. However, this choice is not recommended and should be used
with care because it causes a sudden drop in the stress at the material point
that can lead to dynamic instabilities.
The evolution in the damage can be specified in linear or exponential form.
Linear Form
Assume a linear evolution of the damage variable with plastic displacement.
You can specify the fracture energy per unit area, .
Then, once the damage initiation criterion is met, the damage variable
increases according to
where the equivalent plastic displacement at failure is computed as
and
is the value of the yield stress at the time when the failure criterion is
reached. Therefore, the model becomes equivalent to that shown in
Figure 2(b).
The model ensures that the energy dissipated during the damage evolution
process is equal to
only if the effective response of the material is perfectly plastic (constant
yield stress) beyond the onset of damage.
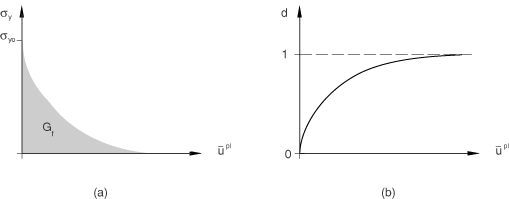
Exponential Form
Assume an exponential evolution of the damage variable given as
The formulation of the model ensures that the energy dissipated during the
damage evolution process is equal to ,
as shown in
Figure 3(a).
In theory, the damage variable reaches a value of 1 only asymptotically at
infinite equivalent plastic displacement (Figure 3(b)).
In practice,
Abaqus/Explicit
will set d equal to one when the dissipated energy reaches
a value of .
Energy-based damage evolution with exponential law: evolution of (a)
yield stress and (b) damage variable.
Maximum Degradation and Choice of Element Removal
You have control over how
Abaqus
treats elements with severe damage. You can specify an upper bound,
,
to the overall damage variable,
and you can choose whether to delete an element once maximum degradation is
reached. The latter choice also affects which stiffness components are damaged.
Specifying the Value of Maximum Degradation
The default setting of
depends on whether elements are to be deleted upon material failure. For the
default case of element deletion and in all cases for cohesive elements,
;
otherwise, .
Output variable SDEG contains the value of
No further damage is accumulated at an integration point once
reaches
(except, of course, any remaining stiffness is lost upon element deletion).
Removing the Element from the Mesh
A material point is assumed to fail upon reaching maximum degradation.
Except for cohesive elements with traction-separation response (see
Defining the Constitutive Response of Cohesive Elements Using a Traction-Separation Description),
Abaqus
applies damage to all stiffness components equally at material points during
the progressive damage process. At any given time during the analysis, the
stress tensor in the material is given by the scalar damage equation
where
is the effective (or undamaged) stress tensor computed in the current
increment. By default, an element is deleted (or removed) from a mesh upon
material failure. Details for element deletion driven by material failure are
described in
Material Failure and Element Deletion.
The status of a material point and an element can be determined by requesting
output variables STATUSMP and STATUS, respectively.
In a heat transfer analysis the thermal properties of the material are not
affected by the damage status of the material stiffness until the element
deletion condition is reached; at this point, the thermal contribution of the
element is also removed.
Keeping the Element in the Computations
Optionally, you may choose not to remove the element from the mesh, except
in the case of three-dimensional beam elements. With element deletion turned
off, the overall damage variable is enforced to be .
The default value is
if element deletion is turned off, which ensures that elements will remain
active in the simulation with a residual stiffness of at least 1% of the
original stiffness. The dimensionality of the stress state of the element
affects which stiffness components can become damaged, as discussed below.
In a heat transfer analysis the thermal properties of the material are not
affected by damage of the material stiffness.
Elements with Three-Dimensional Stress States in Abaqus/Explicit
For elements with three-dimensional stress states (including generalized
plane strain elements) the shear stiffness will be degraded up to a maximum
value, ,
leading to softening of the deviatoric stress components. The bulk stiffness,
however, will be degraded only while the material is subjected to negative
pressures (i.e., hydrostatic tension); there is no bulk degradation under
positive pressures. This corresponds to a fluid-like behavior. Therefore, the
degraded deviatoric, , and pressure,
p, stresses are computed as
where the deviatoric and volumetric damage variables are given as
In this case the output variable SDEG contains the value of .
Elements with Three-Dimensional Stress States in Abaqus/Standard
For elements with three-dimensional stress states (including generalized
plane strain elements) the stiffness will be degraded uniformly until the
maximum degradation, ,
is reached. Output variable SDEG contains the value of D.
Elements with Plane Stress States
For elements with a plane stress formulation (plane stress, shell,
continuum shell, and membrane elements) the stiffness will be degraded
uniformly until the maximum degradation, ,
is reached. Output variable SDEG contains the value of D.
Elements with One-Dimensional Stress States
For elements with a one-dimensional stress state (i.e., truss elements,
rebar, and cohesive elements with gasket behavior) their only stress component
will be degraded if it is positive (tension). The material stiffness will
remain unaffected under compression loading. The stress is, therefore, given by
,
where the uniaxial damage variable is computed as
In this case
determines the maximum allowed degradation in uniaxial tension
().
Output variable SDEG contains the value of .
Convergence Difficulties in Abaqus/Standard
Material models exhibiting softening behavior and stiffness degradation
often lead to severe convergence difficulties in implicit analysis programs,
such as
Abaqus/Standard.
Some techniques are available in
Abaqus/Standard
to improve convergence for analyses involving these materials.
Viscous Regularization in Abaqus/Standard
You can overcome some of the convergence difficulties associated with
softening and stiffness degradation by using the viscous regularization scheme,
which causes the tangent stiffness matrix of the softening material to be
positive for sufficiently small time increments.
In this regularization scheme a viscous damage variable is defined by the
evolution equation:
where
is the viscosity coefficient representing the relaxation time of the viscous
system and d is the damage variable evaluated in the
inviscid base model. The damaged response of the viscous material is computed
using the viscous value of the damage variable. Using viscous regularization
with a small value of the viscosity parameter (small compared to the
characteristic time increment) usually helps improve the rate of convergence of
the model in the softening regime, without compromising results. The basic idea
is that the solution of the viscous system relaxes to that of the inviscid case
as , where
t represents time.
In general, if any of the ductile evolution models is used, the material
Jacobian matrix will be nonsymmetric. To improve convergence, it is recommended
that the unsymmetric equation solver is used in this case.
Using the Damage Models with Rebar
It is possible to use material damage models in elements for which rebar are
also defined. The base material contribution to the element stress-carrying
capacity diminishes according to the behavior described previously in this
section. The rebar contribution to the element stress-carrying capacity will
not be affected unless damage is also included in the rebar material
definition; in that case the rebar contribution to the element stress-carrying
capacity will also be degraded after the damage initiation criterion specified
for the rebar is met. For the default choice of element deletion, the element
is removed from the mesh when at any one integration location all section
points in the base material and rebar are fully degraded.
Elements
Damage evolution for ductile metals can be defined for any element that can
be used with the damage initiation criteria for ductile metals in
Abaqus
(Damage Initiation for Ductile Metals).
Status of element (the status of an element is 1.0 if the element is active,
0.0 if the element is not).
STATUSMP
Status of each material point in the element (1.0 if a material point is
active, 0.0 if it is not).
Abaqus/Explicit
only.
SDEG
Overall scalar stiffness degradation, D.
References
Hillerborg, A., M. Modeer, and P. E. Petersson, “Analysis
of Crack Formation and Crack Growth in Concrete by Means of Fracture Mechanics
and Finite Elements,” Cement and Concrete
Research, vol. 6, pp. 773–782, 1976.