can be used with the Hashin damage initiation criterion for unidirectional
fiber-reinforced composites to take into account four different failure modes: fiber
tension, fiber compression, matrix tension, and matrix compression, with four damage
variables to describe damage for each failure mode;
can be used with the ply fabric damage initiation criterion for bidirectional
fabric-reinforced composites to take into account five different failure modes: four modes
of fiber failure and one of matrix shear failure, with five damage variables to describe
damage for each failure mode;
is based on energy dissipation during the damage process;
offers options for what occurs upon failure, including the removal of elements from the
mesh; and
can be used with a viscous regularization of the constitutive equations to improve the
convergence rate in the softening regime if used with the Hashin damage initiation
criterion.
The previous section (Damage Initiation for Fiber-Reinforced Composites) discussed the
damage initiation in plane stress fiber-reinforced composites. This section will discuss the
post-damage initiation behavior for cases in which a damage evolution model has been
specified. Prior to damage initiation the material is linearly elastic, with the stiffness
matrix of a plane stress orthotropic material. Thereafter, the response of the material is
computed from
where is the elastic strain and is the damaged elasticity matrix, which has the form
where , reflects the current state of fiber damage, reflects the current state of matrix damage, reflects the current state of shear damage, is the Young's modulus in the fiber direction, is the Young's modulus in the matrix direction, is the shear modulus, and and are Poisson's ratios.
The damage variables , , and are derived from damage variables , , , and , corresponding to the four failure modes previously discussed, as follows:
and are components of the effective stress tensor. The effective stress tensor
is primarily used to evaluate damage initiation criteria; see Damage Initiation for Fiber-Reinforced Composites for a description of how the effective
stress tensor is computed.
Evolution of Damage Variables for Each Mode
To alleviate mesh dependency during material softening, Abaqus introduces a characteristic length into the formulation, so that the constitutive law
is expressed as a stress-displacement relation. The damage variable evolves such that the
stress-displacement behaves as shown in Figure 1 in each of the four failure modes. The positive slope of the stress-displacement curve
prior to damage initiation corresponds to linear elastic material behavior; the negative
slope after damage initiation is achieved by evolution of the respective damage variables
according to the equations shown below.
Equivalent stress versus equivalent displacement.
Equivalent displacement and stress for each of the four damage modes are defined as
follows:
Fiber tension :
Fiber compression :
Matrix tension :
Matrix compression :
The characteristic length, , is based on the element geometry and formulation: it is a typical
length of a line across an element for a first-order element; it is half of the same
typical length for a second-order element. For membranes and shells it is a characteristic
length in the reference surface, computed as the square root of the area. Alternatively,
this characteristic length could be defined as a function of the element topology and
material orientation in user subroutine VUCHARLENGTH (see Defining the Characteristic Element Length at a Material Point in Abaqus/Explicit). The symbol in the equations above represents the Macaulay bracket operator, which
is defined for every as .
After damage initiation (i.e., ) for the behavior shown in Figure 1, the damage variable for a particular mode is given by the following expression
where is the initial equivalent displacement at which the initiation criterion
for that mode was met and is the displacement at which the material is completely damaged in this
failure mode. The above relation is presented graphically in Figure 2.
Damage variable as a function of equivalent displacement.
The values of for the various modes depend on the elastic stiffness and the strength
parameters specified as part of the damage initiation definition (see Damage Initiation for Fiber-Reinforced Composites). For each failure mode you must specify
the energy dissipated due to failure, , which corresponds to the area of the triangle
OAC in Figure 3.
Linear damage evolution.
The values of for the various modes depend on the respective values.
Unloading from a partially damaged state, such as point
B in Figure 3, occurs along a linear path toward the origin in the plot of equivalent stress versus
equivalent displacement; this same path is followed back to point
B upon reloading as shown in the figure.
Damage Evolution for the Ply Fabric Model
The ply fabric damage initiation criterion for bidirectional fabric-reinforced composites
is described in Damage Initiation for Fiber-Reinforced Composites. This section
discusses the post-damage initiation behavior for cases in which a damage evolution model is
specified.
where is the elastic strain, and is the damaged elasticity matrix. The damaged elasticity matrix has the
form
where , reflects the current state of fiber damage in the local 1-direction, reflects the current state of fiber damage in the local 2-direction, reflects the current state of matrix shear damage, is the Young's modulus in the local 1-direction, is the Young's modulus in the local 2-direction, is the shear modulus, and and are Poisson's ratios.
The model differentiates between tensile and compressive fiber failure modes by activating
the corresponding damage variable depending on the stress state in the fiber directions. Thus:
and
The symbol in the equations above represents the Macaulay bracket operator. For the
four damage variables , are associated with fiber failure. An index is introduced to simplify notation and is used in subsequent
discussions.
To incorporate different initial (undamaged) stiffness in tension and compression, the
values of the elastic constants , , and are interpolated between their tensile values (, , and ) or compressive values (, , and ) depending on the state of the material. You must define these elastic
constants using bilamina elasticity (see Defining Orthotropic Elasticity in Plane Stress with Different Moduli in Tension and Compression).
Evolution of Damage Variables for Each Mode
For the four damage variables , associated with fiber failure, the evolution of these damage variables
is a function of the damage thresholds and the fracture energy per unit area under
uniaxial tensile/compressive loading, . The evolution of the damage variables is given by the equation:
where
Here, is the characteristic length of the element, is the fracture energy per unit area under uniaxial tensile/compressive
loading, and is the elastic energy density (that is. per unit volume) at the point of
damage initiation:
where are the tensile/compressive strengths for uniaxial loading along the
fiber directions. The formulation of the damage evolution law ensures that the damage
variables are monotonically increasing quantities. It also ensures that the correct amount
of energy is dissipated when the lamina is subjected to uniaxial loading conditions along
the fiber directions.
The characteristic length, , is based on the element geometry and formulation. It is a typical
length of a line across an element for a first-order element; it is half of the same
typical length for a second-order element. For membrane and shell elements it is a
characteristic length in the reference surface, computed as the square root of the area.
Alternatively, you can define this characteristic length as a function of the element
topology and material orientation in user subroutine VUCHARLENGTH (see Defining the Characteristic Element Length at a Material Point in Abaqus/Explicit).
It is assumed that the shear damage variable increases with the logarithm of until a maximum value is reached. Thus:
where , and are material properties.
Calibration Procedure
You can measure the elastic constants and the fiber tensile/compressive strengths, , from standard coupon tests in uniaxial tension/compression loading of laminates. The calibration of damage evolution in the fiber failure
modes is based on the fracture energy per unit area of the material, , which can be measured experimentally.
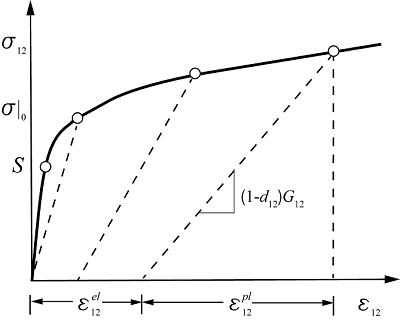
The shear response is usually calibrated with a cyclic tensile test on a laminate, where the strains along the fiber directions can be neglected.
Figure 4 shows the typical shear response of a fabric-reinforced composite. The
unloading/reloading paths correspond to an idealization of the actual response, which
usually exhibits hysteretic behavior. Figure 4 serves as a starting point for the discussion of a general calibration
procedure for the parameters that enter the damage and plasticity equations.
Shear response of a bidirectional fabric-reinforced composite.
The level of damage can be measured from the ratio of the unloading stiffness to the
initial (undamaged) elastic stiffness. You can compute pairs of stress-damage values, , for each unloading curve. This data can be represented in the space of versus , where . A linear fit of the data provides the values of (slope of the line) and (intersection with the horizontal axis), as shown in Figure 5. Sometimes the damage data show indication of a saturation value, which
would be used to determine . Otherwise, you should use a value of .
Calibration of the shear damage parameters.
Finally, for each unloading curve in Figure 4, the plastic strain at the onset of unloading is determined from the value of residual
deformation in the unloaded state. The values of at the onset of unloading are then used to fit the Johnson-Cook
parameters of the yield function or, alternatively, they can be used directly as tabular
input of the hardening curve.
In Abaqus/Standard a material point is considered to fail once all failure modes reach . In Abaqus/Explicit a material point is assumed to fail when either of the damage variables associated with
fiber failure modes (tensile or compressive) reaches . By default, an element is deleted from a mesh upon material failure.
Details for element deletion driven by material failure are described in Material Failure and Element Deletion. The status of a material point and an element can be determined by
requesting output variables STATUSMP and
STATUS, respectively.
Alternatively, you can specify that an element should remain in the model even after all
of the damage variables reach (see Controlling Element Deletion and Maximum Degradation for Materials with Damage Evolution). In this case,
once all of the damage variables reach the maximum value, the stiffness, , remains constant (see the expression for earlier in this section).
For ply fabric damage evolution (available only in Abaqus/Explicit), you have more control over the criteria for material failure. You can consider a
material point to fail if any one of the following criteria is met:
when either fiber damage variable reaches a specified maximum value or , or when both fiber damage variables reach the maximum specified value and ;
when the shear plastic strain reaches a specified maximum value, ; or
when a deformation-based material failure criterion depending on the values of the
maximum () and minimum () principal logarithmic strains that the material can sustain is
met.
If you do not define conditions that trigger material failure for the ply fabric model, the
material point fails when either fiber damage variable reaches a specified maximum
value.
Viscous Regularization
Material models exhibiting softening behavior and stiffness degradation often lead to
severe convergence difficulties in implicit analysis programs, such as Abaqus/Standard. You can overcome some of these convergence difficulties by using the viscous
regularization scheme, which causes the tangent stiffness matrix of the softening material
to be positive for sufficiently small time increments.
In this regularization scheme a viscous damage variable is defined by the evolution
equation:
where is the viscosity coefficient representing the relaxation time of the
viscous system and d is the damage variable evaluated in the inviscid
backbone model. The damaged response of the viscous material is given as
where the damaged elasticity matrix, , is computed using viscous values of damage variables for each failure
mode. Using viscous regularization with a small value of the viscosity parameter (small
compared to the characteristic time increment) usually helps improve the rate of convergence
of the model in the softening regime, without compromising results. The basic idea is that
the solution of the viscous system relaxes to that of the inviscid case as , where t represents time.
Viscous regularization is also available in Abaqus/Explicit for the Hashin damage model. Viscous regularization slows down the rate of increase of
damage and leads to increased fracture energy with increasing deformation rates, which can
be exploited as an effective method of modeling rate-dependent material behavior.
In Abaqus/Standard the approximate amount of energy associated with viscous regularization over the whole
model or over an element set is available using output variable
ALLCD.
You cannot use the viscous regularization scheme with damage evolution for the ply fabric
damage initiation criterion.
Defining Viscous Regularization Coefficients
You can specify different values of viscous coefficients for different failure modes.
Applying a Single Viscous Coefficient in Abaqus/Standard
If stiffness proportional damping is specified in combination with the damage evolution law
for fiber-reinforced materials, Abaqus calculates the damping stresses using the damaged elastic stiffness.
Elements
The damage evolution law for fiber-reinforced materials must be used with elements with a
plane stress formulation, which include plane stress, shell, continuum shell, and membrane
elements.
Status of the element (the status of an element is 1.0 if the element is active, 0.0
if the element is not).
STATUSMP
Status of each material point in the element (1.0 if a material point is active, 0.0
if it is not). Abaqus/Explicit only.
DAMAGEFT
Fiber tensile damage variable for the Hashin model.
DAMAGEFC
Fiber compressive damage variable for the Hashin model.
DAMAGEMT
Matrix tensile damage variable for the Hashin model.
DAMAGEMC
Matrix compressive damage variable for the Hashin model.
DAMAGESHR
Shear damage variable for the Hashin model and ply fabric model.
DAMAGEF1T
Fiber tensile damage variable in the local 1-direction for the ply fabric model.
DAMAGEF1C
Fiber compressive damage variable in the local 1-direction for the ply fabric model.
DAMAGEF2T
Fiber tensile damage variable in the local 2-direction for the ply fabric model.
DAMAGEF2C
Fiber compressive damage variable in the local 2-direction for the ply fabric model.
EDMDDEN
Energy dissipated per unit volume in the element by damage.
ELDMD
Total energy dissipated in the element by damage.
DMENER
Energy dissipated per unit volume by damage.
ALLDMD
Energy dissipated in the whole (or partial) model by damage.
ALLPD
Energy dissipated in the whole (or partial) model by shear plasticity in the ply
fabric model.
ECDDEN
Energy per unit volume in the element that is associated with viscous regularization.
ELCD
Total energy in the element that is associated with viscous regularization.
CENER
Energy per unit volume that is associated with viscous regularization.
ALLCD
The approximate amount of energy over the whole model or over an element set that is
associated with viscous regularization.
References
Lapczyk, I., and J. A. Hurtado, “Progressive
Damage Modeling in Fiber-Reinforced
Materials,” Composites Part A: Applied
Science and
Manufacturing, vol. 38, no. 11, pp. 2333–2341, 2007.
Sokolinsky, V.S., K. C. Indermuehle, and J. A. Hurtado, “Numerical Simulation of the Crushing Process of a Corrugated Composite Plate,” Composites Part A: Applied Science and Manufacturing, vol. 42, no. 9, pp. 1119–1126, 2011.