The material damage initiation capability for ductile metals:
is intended as a general capability for predicting initiation of
damage in metals, including sheet, extrusion, and cast metals as well as other
materials;
allows the specification of more than one damage initiation criterion;
includes ductile (tabular, Johnson-Cook, and Hosford-Coulomb), shear, forming limit diagram
(FLD), forming limit stress diagram
(FLSD) and Müschenborn-Sonne forming limit diagram
(MSFLD) criteria for damage initiation;
includes in
Abaqus/Explicit
the Marciniak-Kuczynski (M-K) and Johnson-Cook
criteria for damage initiation;
can be used in Abaqus/Standard in conjunction with Mises, Johnson-Cook, Hill, and Drucker-Prager plasticity (ductile,
shear, FLD, FLSD, and
MSFLD criteria); and
can be used in
Abaqus/Explicit
in conjunction with Mises and Johnson-Cook plasticity (ductile, shear,
FLD, FLSD,
MSFLD, Johnson-Cook, and
MK criteria) and in conjunction with Hill and
Drucker-Prager plasticity (ductile, shear,
FLD, FLSD,
MSFLD, and Johnson-Cook criteria).
Two main mechanisms can cause the fracture of a ductile metal: ductile
fracture due to the nucleation, growth, and coalescence of voids; and shear
fracture due to shear band localization. Based on phenomenological
observations, these two mechanisms call for different forms of the criteria for
the onset of damage (Hooputra
et al., 2004). The functional forms provided by
Abaqus
for these criteria are discussed below. These criteria can be used in
combination with the damage evolution models for ductile metals discussed in
Damage Evolution and Element Removal for Ductile Metals
to model fracture of a ductile metal. (See
Progressive failure analysis of thin-wall aluminum extrusion under quasi-static and dynamic loads
for an example.)
Ductile Criterion
The ductile criterion is a phenomenological model for predicting the onset
of damage due to nucleation, growth, and coalescence of voids. The model
assumes that the equivalent plastic strain at the onset of damage,
,
is a function of stress triaxiality and strain rate:
where
is the stress triaxiality, p is the pressure stress,
q is the Mises equivalent stress, and
is the equivalent plastic strain rate. The criterion for damage initiation is
met when the following condition is satisfied:
where is a
state variable that increases monotonically with plastic deformation. At each
increment during the analysis the incremental increase in
is
computed as
In
Abaqus/Standard
the ductile criterion can be used in conjunction with the Mises, Johnson-Cook,
Hill, and Drucker-Prager plasticity models and in
Abaqus/Explicit
in conjunction with the Mises, Johnson-Cook, Hill, and Drucker-Prager
plasticity models, including equation of state.
Defining Dependency of Ductile Criterion on Lode Angle
Experimental results for aluminum alloys and other metals (Bai
and Wierzbicki, 2008) reveal that, in addition to stress triaxiality and
strain rate, ductile fracture can also depend on the third invariant of
deviatoric stress, which is related to the Lode angle (or deviatoric polar
angle). Specific models that account for this dependency include the Modified
Mohr-Coulomb (MMC) fracture criterion proposed by
Bai and Wierzbicki (2010) and the
Hosford-Coulomb criterion proposed by
Mohr and Marcadet (2015).
Abaqus
allows the definition of the equivalent plastic strain at the onset of ductile
damage, ,
as a function of the Lode angle, , by way of the
functional form
where
q is the Mises equivalent stress, and
r is the third invariant of deviatoric stress,
.
The function
can take values from ,
for stress states on the compressive meridian, to ,
for stress states on the tensile meridian.
Johnson-Cook Criterion
The Johnson-Cook criterion (available only in
Abaqus/Explicit)
is a special case of the ductile criterion in which the equivalent plastic
strain at the onset of damage, ,
is assumed to be of the form
where –
are failure parameters and
is the reference strain rate. This expression differs from the original formula
published by
Johnson
and Cook (1985) in the sign of the parameter .
This difference is motivated by the fact that most materials experience a
decrease in
with increasing stress triaxiality; therefore,
in the above expression will usually take positive values.
is the nondimensional temperature defined as
where
is the current temperature,
is the melting temperature, and
is the transition temperature defined as the one at or below which there is no
temperature dependence on the expression of the damage strain
.
The material parameters must be measured at or below the transition
temperature.
The Johnson-Cook criterion can be used in conjunction with the Mises,
Johnson-Cook, Hill, and Drucker-Prager plasticity models, including equation of
state. When used in conjunction with the Johnson-Cook plasticity model, the
specified values of the melting and transition temperatures should be
consistent with the values specified in the plasticity definition. The
Johnson-Cook damage initiation criterion can also be specified together with
any other initiation criteria, including the ductile criteria; each initiation
criterion is treated independently.
Hosford-Coulomb Criterion
The Hosford-Coulomb criterion is based on the work of Mohr and Marcadet (2015), Roth and Mohr (2014), and Roth and Mohr (2016) and is a special
case of the ductile criterion in which the equivalent plastic strain at the onset of
damage, , is assumed to be of the form
where is the stress triaxiality; a,
b, c, d, and
n are material parameters; is the reference strain rate; and
with the Lode angle parameter defined as
The Hosford exponent controls the effect of the Lode angle parameter and can reproduce
Tresca criteria ( or ) and von Mises criteria ( or ). The parameter equals the strain to fracture for uniaxial tension (or equibiaxial
tension). The friction coefficient controls the influence of the normal stress. The parameter can be regarded as the hardening exponent in a power law isotropic
hardening model; typically for metals.
The Hosford-Coulomb criterion can be used in conjunction with the Mises, Johnson-Cook,
Hill, and Drucker-Prager plasticity models. It can also be specified together with any
other initiation criteria; each initiation criterion is treated independently.
Shear Criterion
The shear criterion is a phenomenological model for predicting the onset of
damage due to shear band localization. The model assumes that the equivalent
plastic strain at the onset of damage, ,
is a function of the shear stress ratio and strain rate:
Here
is the shear stress ratio,
is the maximum shear stress, and
is a material parameter. A typical value of
for aluminum is
= 0.3 (Hooputra et al., 2004). The criterion for damage initiation is met when
the following condition is satisfied:
where is a
state variable that increases monotonically with plastic deformation
proportional to the incremental change in equivalent plastic strain. At each
increment during the analysis the incremental increase in
is
computed as
Alternatively, the shear stress ratio, , can be expressed as a function of triaxiality, , and the Lode angle, . Rewriting the expression for the shear stress ratio as
the maximum shear stress can be expressed as a function of the Mises stress and the Lode
angle:
Substituting the above relation in the expression for the shear stress ratio, we
obtain
This expression shows that the criterion depends on the Lode angle and stress
triaxiality, and the parameter, , represents the influence of the stress triaxiality in shear
failure.
In
Abaqus/Explicit
the shear criterion can be used in conjunction with the Mises, Johnson-Cook,
Hill, and Drucker-Prager plasticity models, including equation of state. In
Abaqus/Standard
it can be used with the Mises, Johnson-Cook, Hill, and Drucker-Prager models.
Nonlinear Accumulation of the Damage Initiation Criterion
The linear form of accumulation of the damage initiation criterion described above might not
predict the correct onset of damage in situations when the deformation history is not
linear (for example, changing stress triaxiality). It has been shown that you can achieve
better predictions if you use a formulation based on a power law rule to characterize the
nonlinearity in the accumulation of the damage initiation criterion. This power law
formulation is available with the ductile, shear, and Hosford-Coulomb criteria in both Abaqus/Standard and Abaqus/Explicit and with the Johnson-Cook criterion in Abaqus/Explicit. For the ductile and Johnson-Cook criteria, it has the form:
and for the shear criterion it can be expressed as:
where n is the accumulation power.
Initial Conditions
Optionally, you can specify the initial work hardened state of the material by providing the
initial equivalent plastic strain values (see Defining Initial Values of State Variables for Plastic Hardening) and, if residual stresses are also present, the initial stress values (see Defining Initial Stresses). Abaqus uses this information to initialize the values of the ductile and shear damage
initiation criteria, and , assuming constant values of stress triaxiality and shear shear ratio
(linear stress path).
Damage Initiation Criteria for Sheet Metal Instability
Necking instability plays a determining factor in sheet metal forming
processes: the size of the local neck region is typically of the order of the
thickness of the sheet, and local necks can rapidly lead to fracture. Localized
necking cannot be modeled with traditional shell elements used in sheet metal
forming simulations because the size of the neck is of the order of the
thickness of the element.
Abaqus
supports four criteria for predicting the onset of necking instability in sheet
metals: forming limit diagram (FLD); forming
limit stress diagram (FLSD); Müschenborn-Sonne
forming limit diagram (MSFLD); and
Marciniak-Kuczynski (M-K) criteria, which is
available only in
Abaqus/Explicit.
These criteria apply only to elements with a plane stress formulation (plane
stress, shell, continuum shell, and membrane elements);
Abaqus
ignores these criteria for other elements. The initiation criteria for necking
instability can be used in combination with the damage evolution models
discussed in
Damage Evolution and Element Removal for Ductile Metals
to account for the damage induced by necking.
Classical strain-based forming limit diagrams (FLDs) are known
to be dependent on the strain path. Changes in the deformation mode (for example,
equibiaxial loading followed by uniaxial tensile strain) may result in major modifications
in the level of the limit strains. Therefore, the FLD
damage initiation criterion should be used with care if the strain paths in the analysis are
nonlinear. In practical industrial applications, significant changes in the strain path may
be induced by multistep forming operations, complex geometry of the tooling, and interface
friction, among other factors. For problems with highly nonlinear strain paths Abaqus offers three additional damage initiation criteria: the forming limit stress diagram
(FLSD) criterion, the Müschenborn-Sonne forming limit
diagram (MSFLD) criterion, and in Abaqus/Explicit the Marciniak-Kuczynski (M-K) criterion; these
alternatives to the FLD damage initiation criterion are
intended to minimize load path dependence.
The characteristics of each criterion available in
Abaqus
for predicting damage initiation in sheet metals are discussed below.
Forming Limit Diagram (FLD) Criterion
The forming limit diagram (FLD) is a useful
concept introduced by Keeler and Backofen (1964) to determine the amount of
deformation that a material can withstand prior to the onset of necking
instability. The maximum strains that a sheet material can sustain prior to the
onset of necking are referred to as the forming limit strains. A
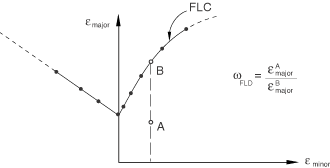
FLD is a plot of the forming limit strains in
the space of principal (in-plane) logarithmic strains. In the discussion that
follows major and
minor limit strains refer to the maximum and
minimum values of the in-plane principal limit strains, respectively. The major
limit strain is usually represented on the vertical axis and the minor strain
on the horizontal axis, as illustrated in
Figure 1.
The line connecting the states at which deformation becomes unstable is
referred to as the forming limit curve (FLC).
The FLC gives a sense of the formability of a
sheet of material. Strains computed numerically by
Abaqus
can be compared to a FLC to determine the
feasibility of the forming process under analysis.
Forming limit diagram (FLD).
The FLD damage initiation criterion
requires the specification of the FLC in
tabular form by giving the major principal strain at damage initiation as a
tabular function of the minor principal strain and, optionally, temperature and
predefined field variables, .
The damage initiation criterion for the FLD is
given by the condition ,
where the variable
is a function of the current deformation state and is defined as the ratio of
the current major principal strain, ,
to the major limit strain on the FLC evaluated
at the current values of the minor principal strain, ;
temperature, ;
and predefined field variables, :
For example, for the deformation state given by point A in
Figure 1
the damage initiation criterion is evaluated as
If the value of the minor strain lies outside the range of the specified
tabular values,
Abaqus
will extrapolate the value of the major limit strain on the
FLC by assuming that the slope at the endpoint
of the curve remains constant. Extrapolation with respect to temperature and
field variables follows the standard conventions: the property is assumed to be
constant outside the specified range of temperature and field variables (see
Material Data Definition).
Experimentally, FLDs are measured under
conditions of biaxial stretching of a sheet, without bending effects. Under
bending loading, however, most materials can achieve limit strains that are
much greater than those on the FLC. To avoid
the prediction of early failure under bending deformation,
Abaqus
evaluates the FLD criterion using the strains
at the midplane through the thickness of the element. For composite shells with
several layers the criterion is evaluated at the midplane of each layer for
which a FLD curve has been specified, which
ensures that only biaxial stretching effects are taken into account. Therefore,
the FLD criterion is not suitable for modeling
failure under bending loading; other failure models (such as ductile and shear
failure) are more appropriate for such loading. Once the
FLD damage initiation criterion is met, the
evolution of damage is driven independently at each material point through the
thickness of the element based on the local deformation at that point. Thus,
although bending effects do not affect the evaluation of the
FLD criterion, they may affect the rate of
evolution of damage.
Forming Limit Stress Diagram (FLSD) Criterion
When strain-based FLCs are converted into
stress-based FLCs, the resulting stress-based
curves have been shown to be minimally affected by changes to the strain path
(Stoughton, 2000); that is, different strain-based
FLCs, corresponding to different strain paths,
are mapped onto a single stress-based FLC.
This property makes forming limit stress diagrams
(FLSDs) an attractive alternative to
FLDs for the prediction of necking instability
under arbitrary loading. However, the apparent independence of the stress-based
limit curves on the strain path may simply reflect the small sensitivity of the
yield stress to changes in plastic deformation. This topic is still under
discussion in the research community.
A FLSD is the stress counterpart of the
FLD, with the major and minor principal
in-plane stresses corresponding to the onset of necking localization plotted on
the vertical and horizontal axes, respectively. In
Abaqus
the FLSD damage initiation criterion requires
the specification of the major principal in-plane stress at damage initiation
as a tabular function of the minor principal in-plane stress and, optionally,
temperature and predefined field variables, .
The damage initiation criterion for the FLSD
is met when the condition
is satisfied, where the variable
is a function of the current stress state and is defined as the ratio of the
current major principal stress, ,
to the major stress on the FLSD evaluated at
the current values of minor stress, ;
temperature, ;
and predefined field variables, :
If the value of the minor stress lies outside the range of specified tabular
values,
Abaqus
will extrapolate the value of the major limit stress assuming that the slope at
the endpoints of the curve remains constant. Extrapolation with respect to
temperature and field variables follows the standard conventions: the property
is assumed to be constant outside the specified range of temperature and field
variables (see
Material Data Definition).
For reasons similar to those discussed earlier for the
FLD criterion,
Abaqus
evaluates the FLSD criterion using the
stresses averaged through the thickness of the element (or the layer, in the
case of composite shells with several layers), ignoring bending effects.
Therefore, the FLSD criterion cannot be used
to model failure under bending loading; other failure models (such as ductile
and shear failure) are more suitable for such loading. Once the
FLSD damage initiation criterion is met, the
evolution of damage is driven independently at each material point through the
thickness of the element based on the local deformation at that point. Thus,
although bending effects do not affect the evaluation of the
FLSD criterion, they may affect the rate of
evolution of damage.
Marciniak-Kuczynski (M-K) Criterion
Another approach available in
Abaqus/Explicit
for accurately predicting the forming limits for arbitrary loading paths is
based on the localization analysis proposed by Marciniak and Kuczynski (1967).
The approach can be used with the Mises and Johnson-Cook plasticity models,
including kinematic hardening. In M-K
analysis, virtual thickness imperfections are introduced as grooves simulating
preexisting defects in an otherwise uniform sheet material. The deformation
field is computed inside each groove as a result of the applied loading outside
the groove. Necking is considered to occur when the ratio of the deformation in
the groove relative to the nominal deformation (outside the groove) is greater
than a critical value.
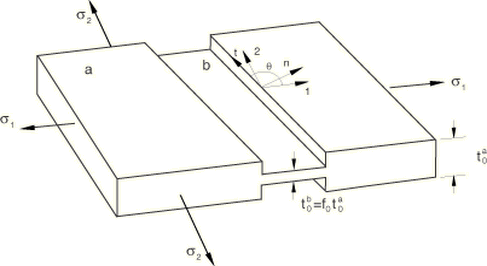
Figure 2
shows schematically the geometry of the groove considered for
M-K analysis. In the figure
a denotes the nominal region in the shell element outside
the imperfection, and b denotes the weak groove region.
The initial thickness of the imperfection relative to the nominal thickness is
given by the ratio ,
with the subscript 0 denoting quantities in the initial, strain-free state. The
groove is oriented at a zero angle with respect to the 1-direction of the local
material orientation.
Imperfection model for the M-K
analysis.
Abaqus/Explicit
allows the specification of an anisotropic distribution of thickness
imperfections as a function of angle with respect to the local material
orientation, .
Abaqus/Explicit
first solves for the stress-strain field in the nominal area ignoring the
presence of imperfections; then it considers the effect of each groove alone.
The deformation field inside each groove is computed by enforcing the strain
compatibility condition
and the force equilibrium equations
The subscripts n and t refer to
the directions normal and tangential to the groove. In the above equilibrium
equations
and
are forces per unit width in the t-direction.
The onset of necking instability is assumed to occur when the ratio of the
rate of deformation inside a groove relative to the rate of deformation if no
groove were present is greater than a critical value. In addition, it may not
be possible to find a solution that satisfies equilibrium and compatibility
conditions once localization initiates at a particular groove; consequently,
failure to find a converged solution is also an indicator of the onset of
localized necking. For the evaluation of the damage initiation criterion
Abaqus/Explicit
uses the following measures of deformation severity:
These deformation severity factors are evaluated on each of the specified
groove directions and compared with the critical values. (The evaluation is
performed only if the incremental deformation is primarily plastic; the
M-K criterion will not predict damage
initiation if the deformation increment is elastic.) The most unfavorable
groove direction is used for the evaluation of the damage initiation criterion,
which is given as
where ,
,
and
are the critical values of the deformation severity indices. Damage initiation
occurs when
or when a converged solution to the equilibrium and compatibility equations
cannot be found. By default,
Abaqus/Explicit
assumes ;
you can specify different values. If one of these parameters is set equal to
zero, its corresponding deformation severity factor is not included in the
evaluation of the damage initiation criterion. If all of these parameters are
set equal to zero, the M-K criterion is based
solely on nonconvergence of the equilibrium and compatibility equations.
You must specify the fraction, ,
equal to the initial thickness at the virtual imperfection divided by the
nominal thickness (see
Figure 2),
as well as the number of imperfections to be used for the evaluation of the
M-K damage initiation criterion. It is assumed
that these directions are equally spaced angularly. By default,
Abaqus/Explicit
uses four imperfections located at 0°, 45°, 90°, and 135° with respect to the
local 1-direction of the material. The initial imperfection size can be defined
as a tabular function of angular direction, ;
this allows the modeling of an anisotropic distribution of flaws in the
material.
Abaqus/Explicit
will use this table to evaluate the thickness of each of the imperfections that
will be used for the evaluation of the M-K
analysis method. In addition, the initial imperfection size can also be a
function of initial temperature and field variables; this allows defining a
nonuniform spatial distribution of imperfections.
Abaqus/Explicit
will compute the initial imperfection size based on the values of temperature
and field variables at the beginning of the analysis. The initial size of the
imperfection remains a constant property during the rest of the analysis.
A general recommendation is to choose the value of
such that the forming limit predicted numerically for uniaxial strain loading
conditions ()
matches the experimental result.
The virtual grooves are introduced to evaluate the onset of necking
instability; they do not influence the results in the underlying element. Once
the criterion for necking instability is met, the material properties in the
element are degraded according to the specified damage evolution law.
Performance Considerations for the M-K Criterion
There can be a substantial increase in the overall computational cost when
the M-K criterion is used. For example, the
cost of processing a shell element with three section points through the
thickness and four imperfections, which is the default for the
M-K criterion, increases by approximately a
factor of two compared to the cost without the
M-K criterion. You can mitigate the cost of
evaluating this damage initiation criterion by reducing the number of flaw
directions considered or by increasing the number of increments between
M-K computations, as explained below. Of
course, the effect on the overall analysis cost depends on the fraction of the
elements in the model that use this damage initiation criterion. The
computational cost per element with the M-K
criterion increases by approximately a factor of
where
is the number of imperfections specified for the evaluation of the
M-K criterion and
is the frequency, in number of increments, at which the
M-K computations are performed. The
coefficient of
in the above formula gives a reasonable estimate of the cost increase in most
cases, but the actual cost increase may vary from this estimate. By default,
Abaqus/Explicit
performs the M-K computations on each
imperfection at each time increment, .
Care must be taken to ensure that the M-K
computations are performed frequently enough to ensure the accurate integration
of the deformation field on each imperfection.
Müschenborn and Sonne (1975) proposed a method to predict the influence of
the deformation path on the forming limits of sheet metals on the basis of the
equivalent plastic strain, by assuming that the forming limit curve represents
the sum of the highest attainable equivalent plastic strains.
Abaqus
makes use of a generalization of this idea to establish a criterion of necking
instability of sheet metals for arbitrary deformation paths. The approach
requires transforming the original forming limit curve (without predeformation
effects) from the space of major versus minor strains to the space of
equivalent plastic strain, ,
versus ratio of principal strain rates, .
For linear strain paths, assuming plastic incompressibility and neglecting
elastic strains:
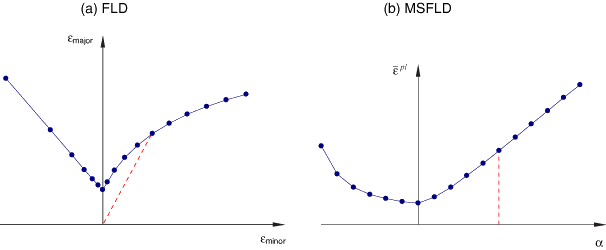
As illustrated in
Figure 3,
linear deformation paths in the FLD transform
onto vertical paths in the –
diagram (constant value of ).
Transformation of the forming limit curve from traditional
FLD representation (a) to
MSFLD representation (b). Linear deformation
paths transform onto vertical paths.
According to the MSFLD criterion, the onset
of localized necking occurs when the sequence of deformation states in the
–
diagram intersects the forming limit curve, as discussed below. It is
emphasized that for linear deformation paths both
FLD and MSFLD
representations are identical and give rise to the same predictions. For
arbitrary loading, however, the MSFLD
representation takes into account the effects of the history of deformation
through the use of the accumulated equivalent plastic strain.
For the specification of the MSFLD damage
initiation criterion in
Abaqus,
you can directly provide the equivalent plastic strain at damage initiation as
a tabular function of
and, optionally, equivalent plastic strain rate, temperature, and predefined
field variables, .
Alternatively, you can specify the curve in the traditional
FLD format (in the space of major and minor
strains) by providing a tabular function of the form .
In this case
Abaqus
will automatically transform the data into the –
format.
Let
represent the ratio of the current equivalent plastic strain,
,
to the equivalent plastic strain on the limit curve evaluated at the current
values of ;
strain rate, ;
temperature, ;
and predefined field variables, :
The MSFLD criterion for necking instability
is met when the condition
is satisfied. Necking instability also occurs if the sequence of deformation
states in the –
diagram intersects the limit curve due to a sudden change in the straining
direction. This situation is illustrated in
Figure 4.
As
changes from
to ,
the line connecting the corresponding points in the –
diagram intersects with the forming limit curve. When this situation occurs,
the MSFLD criterion is reached despite the
fact that .
For output purposes
Abaqus
sets the value of
equal to one to indicate that the criterion has been met.
Illustration of how a sudden change in the straining direction, from
to ,
can produce a horizontal intersection with the limit curve and lead to onset of
necking.
The equivalent plastic strain
used for the evaluation of the MSFLD criterion
in
Abaqus
is accumulated only over increments that result in an increase of the element
area. Strain increments associated with a reduction of the element area cannot
cause necking and do not contribute toward the evaluation of the
MSFLD criterion.
If the value of
lies outside the range of specified tabular values,
Abaqus
extrapolates the value of equivalent plastic strain for initiation of necking
assuming that the slope at the endpoints of the curve remains constant.
Extrapolation with respect to strain rate, temperature, and field variables
follows the standard conventions: the property is assumed to be constant
outside the specified range of strain rate, temperature, and field variables
(see
Material Data Definition).
As discussed in
Progressive damage and failure of ductile metals,
predictions of necking instability based on the
MSFLD criterion agree remarkably well with
predictions based on the Marciniak and Kuczynski criterion, at significantly
less computational cost than the Marciniak and Kuczynski criterion. There are
some situations, however, in which the MSFLD
criterion may overpredict the amount of formability left in the material. This
occurs in situations when, sometime during the loading history, the material
reaches a state that is very close to the point of necking instability and is
subsequently strained in a direction along which it can sustain further
deformation. In this case the MSFLD criterion
may predict that the amount of additional formability in the new direction is
greater than that predicted with the Marciniak and Kuczynski criterion.
However, this situation is often not a concern in practical forming
applications where safety factors in the forming limit diagrams are commonly
used to ensure that the material state is sufficiently far away from the point
of necking. Refer to
Progressive damage and failure of ductile metals
for a comparative analysis of these two criteria.
For reasons similar to those discussed earlier for the
FLD criterion,
Abaqus
evaluates the MSFLD criterion using the
strains at the midplane through the thickness of the element (or the layer, in
the case of composite shells with several layers), ignoring bending effects.
Therefore, the MSFLD criterion cannot be used
to model failure under bending loading; other failure models (such as ductile
and shear failure) are more suitable for such loading. Once the
MSFLD damage initiation criterion is met, the
evolution of damage is driven independently at each material point through the
thickness of the element based on the local deformation at that point. Thus,
although bending effects do not affect the evaluation of the
MSFLD criterion, they may affect the rate of
evolution of damage.
Numerical Evaluation of the Principal Strain Rates Ratio
The ratio of principal strain rates, ,
can jump in value due to sudden changes in the deformation path. Special care
is required during explicit dynamic simulations to avoid nonphysical jumps in
triggered by numerical noise, which may cause a horizontal intersection of the
deformation state with the forming limit curve and lead to the premature
prediction of necking instability.
To overcome this problem, rather than computing
as a ratio of instantaneous strain rates,
Abaqus/Explicit
periodically updates
based on accumulated strain increments after small but significant changes in
the equivalent plastic strain. The threshold value for the change in equivalent
plastic strain triggering an update of
is denoted as ,
and
is approximated as
where
and
are principal values of the accumulated plastic strain since the previous
update of .
The default value of
is 0.002 (0.2%).
In addition,
Abaqus/Explicit
supports the following filtering method for the computation of
:
where
represents the accumulated time over the analysis increments required to have
an increase in equivalent plastic strain of at least .
The factor
()
facilitates filtering high-frequency oscillations. This filtering method is
usually not necessary provided that an appropriate value of
is used. You can specify the value of
directly. The default value is
(no filtering).
In
Abaqus/Standard
is computed at every analysis increment as ,
without using either of the above filtering methods. However, you can still
specify values for
and ;
and these values can be imported into any subsequent analysis in
Abaqus/Explicit.
Initial Conditions
When we need to study the behavior of a material that has been previously subjected to
deformations, such as those originated during the manufacturing process, initial
equivalent plastic strain values can be provided to specify the initial work hardened
state of the material (see Defining Initial Values of State Variables for Plastic Hardening).
In addition, when the initial equivalent plastic strain is greater than the minimum value on
the forming limit curve, the initial value of plays an important role in determining whether the
MSFLD damage initiation criterion will be met during
subsequent deformation. It is, therefore, important to specify the initial value of in these situations. To this end, you can specify initial values of
the plastic strain tensor (see Defining Initial Values of Plastic Strain). Abaqus will use this information to compute the initial value of as the ratio of the minor and major principal plastic strains; that
is, neglecting the elastic component of deformation and assuming a linear deformation
path.
Elements
The damage initiation criteria for ductile metals can be used with any
elements in
Abaqus
that include mechanical behavior (elements that have displacement degrees of
freedom) except for the pipe elements in
Abaqus/Explicit.
The models for sheet metal necking instability (FLD,
FLSD, MSFLD, and
M-K) are available only with elements that include
mechanical behavior and use a plane stress formulation (that is, plane stress, shell,
continuum shell, and membrane elements).
Output
In addition to the standard output identifiers available in Abaqus
, the
following variables have special meaning when a damage initiation criterion is specified:
ERPRATIO
Ratio of principal strain rates, ,
used for the MSFLD damage initiation
criterion.
SHRRATIO
Shear stress ratio, ,
used for the evaluation of the shear damage initiation criterion.
DMICRT
All damage initiation criteria components listed below.
DUCTCRT
Ductile damage initiation criterion, .
JCCRT
Johnson-Cook damage initiation criterion (available only in
Abaqus/Explicit).
SHRCRT
Shear damage initiation criterion, .
FLDCRT
Maximum value of the FLD damage initiation
criterion, ,
during the analysis.
FLSDCRT
Maximum value of the FLSD damage initiation
criterion, ,
during the analysis.
MSFLDCRT
Maximum value of the MSFLD damage
initiation criterion, ,
during the analysis.
MKCRT
Marciniak-Kuczynski damage initiation criterion, (available only in Abaqus/Explicit).
HCCRT
Hosford-Coulomb damage initiation criterion.
A value of 1 or greater for output variables associated with a damage
initiation criterion indicates that the criterion has been met.
Abaqus
will limit the maximum value of the output variable to 1 if a damage evolution
law has been prescribed for that criterion (see
Damage Evolution and Element Removal for Ductile Metals).
However, if no damage evolution is specified, the criterion for damage
initiation will continue to be computed beyond the point of damage initiation;
in this case the output variable can take values greater than 1, indicating by
how much the initiation criterion has been exceeded.
References
Bai, Y., and T. Wierzbicki, “A
New Model of Metal Plasticity and Fracture with Pressure and Lode
Dependence,” International Journal of
Plasticity, vol. 24, no. 6, pp. 1071–1096, 2008.
Bai, Y., and T. Wierzbicki, “Application
of Extended Mohr-Coulomb Criterion to Ductile
Fracture,” International Journal of
Fracture, vol. 161, pp. 1–20, 2010.
Hooputra, H., H. Gese, H. Dell, and H. Werner, “A
Comprehensive Failure Model for Crashworthiness Simulation of Aluminium
Extrusions,” International Journal of
Crashworthiness, vol. 9, no. 5, pp. 449–464, 2004.
Johnson, G.R., and W. H. Cook, “Fracture
Characteristics of Three Metals Subjected to Various Strains, Strain rates,
Temperatures and Pressures,” Engineering
Fracture
Mechanics, vol. 21, no. 1, pp. 31–48, 1985.
Keeler, S.P., and W. A. Backofen, “Plastic
Instability and Fracture in Sheets Stretched over Rigid
Punches,” ASM Transactions
Quarterly, vol. 56, pp. 25–48, 1964.
Marciniak, Z., and K. Kuczynski, “Limit
Strains in the Processes of Stretch Forming Sheet
Metal,” International Journal of Mechanical
Sciences, vol. 9, pp. 609–620, 1967.
Mohr, D., and S. J. Marcadet, “Micromechanically-Motivated
Phenomenological Hosford-Coulomb Model for Predicting Ductile Fracture
Initiation at Low Stress
Triaxialities,” International Journal of
Solids and
Structures, vol. 67–68, pp. 40–55, 2015.
Müschenborn, W., and H. Sonne, “Influence
of the Strain Path on the Forming Limits of Sheet
Metal,” Archiv fur das
Eisenhüttenwesen, vol. 46, no. 9, pp. 597–602, 1975.
Roth, C.C., and D. Mohr, “Effect of Strain Rate on Ductile Fracture Initiation in Advanced High Strength Steel Sheets: Experiments and Modeling,” International Journal of Plasticity, vol. 56, pp. 19–44, 2014.
Roth, C.C., and D. Mohr, “Ductile Fracture Experiments with Locally Proportional Loading Histories,” International Journal of Plasticity, vol. 79, pp. 328–354, 2016.
Stoughton, T.B., “A
General Forming Limit Criterion for Sheet Metal
Forming,” International Journal of Mechanical
Sciences, vol. 42, pp. 1–27, 2000.