are used to simulate the inelastic behavior of materials that are
subjected to cyclic loading;
include a linear kinematic hardening model, a nonlinear
isotropic/kinematic hardening model, and, in
Abaqus/Standard,
a multilinear kinematic hardening model;
include a nonlinear isotropic/kinematic hardening model with multiple
backstresses and, optionally, static recovery effects;
can be used in any procedure that uses elements with displacement
degrees of freedom;
in
Abaqus/Standard
cannot be used in adiabatic analyses, and the nonlinear isotropic/kinematic
hardening model cannot be used in coupled temperature-displacement analyses;
can be used to model rate-dependent yield, except the multilinear
kinematic hardening;
can be used with creep and swelling in
Abaqus/Standard,
except the multilinear kinematic hardening model; and
require the use of the linear elasticity material model to define the
elastic part of the response.
The kinematic hardening models used to model the behavior of metals
subjected to cyclic loading are pressure-independent plasticity models; in
other words, yielding of the metals is independent of the equivalent pressure
stress. These models are suited for most metals subjected to cyclic loading
conditions, except voided metals.
The linear kinematic hardening model can be used with the Mises or Hill
yield surface. The nonlinear isotropic/kinematic model can be used only with
the Mises yield surface in
Abaqus/Standard
and with the Mises or Hill yield surface in
Abaqus/Explicit.
The pressure-independent yield surface used in the linear kinematic hardening
model and the nonlinear isotropic/kinematic hardening model is defined by the
function
where
is the yield stress and
is the equivalent Mises stress or Hill's potential with respect to the
backstress . For example,
the equivalent Mises stress is defined as
where is the deviatoric
stress tensor (defined as ,
where is the stress
tensor, p is the equivalent pressure stress, and
is the identity
tensor) and
is the deviatoric part of the backstress tensor.
The response in the multilinear kinematic hardening model is assumed to be a
weighted sum of various elastic-perfectly plastic elements. Each of these
elements, also referred to as subvolumes, uses the Mises yield surface with a
different yield strength.
Flow Rule
The kinematic hardening models assume associated plastic flow. The
assumption of associated plastic flow is acceptable for metals subjected to
cyclic loading as long as microscopic details, such as localization of plastic
flow occurring as a metal component ruptures due to cyclic fatigue loads, are
not of interest.
Linear Kinematic Hardening Model and Nonlinear Isotropic/Kinematic Hardening Model
In the case of the linear kinematic hardening model and the nonlinear
isotropic/kinematic hardening model:
where
is the rate of plastic flow and
is the equivalent plastic strain rate.
The evolution of the equivalent plastic strain is obtained from the
following equivalent plastic work expression:
which yields
for isotropic Mises plasticity.
Multilinear Kinematic Hardening Model
The flow rule for the multilinear kinematic hardening model is as follows:
where
is the total number of subvolumes and
and
are the weights, Mises yield surface, equivalent plastic strain rate, and the
stress of the kth subvolume, respectively. Every subvolume
follows an associated flow rule.
Hardening
The linear kinematic hardening model has a constant hardening modulus, and
the nonlinear isotropic/kinematic hardening model has both nonlinear kinematic
and nonlinear isotropic hardening components. The multilinear kinematic
hardening model has a piecewise constant hardening modulus.
Linear Kinematic Hardening Model
The evolution law of this model consists of a linear kinematic hardening
component that describes the translation of the yield surface in stress space
through the backstress, .
When temperature dependence is omitted, this evolution law is the linear
Ziegler hardening law
where
is the equivalent plastic strain rate and C is the
kinematic hardening modulus. In this model the equivalent stress defining the
size of the yield surface, ,
remains constant, ,
where
is the equivalent stress defining the size of the yield surface at zero plastic
strain.
Nonlinear Isotropic/Kinematic Hardening Model
The evolution law of this model consists of two components: a nonlinear
kinematic hardening component, which describes the translation of the yield
surface in stress space through the backstress, ; and an
isotropic hardening component, which describes the change of the equivalent
stress defining the size of the yield surface, ,
as a function of plastic deformation.
The kinematic hardening component is defined to be an additive combination
of a purely kinematic term (linear Ziegler hardening law), a relaxation term
(the recall or dynamic recovery term), and,
optionally, a static recovery term. The last two terms introduce the
nonlinearity. In addition, several kinematic hardening components
(backstresses) can be superposed, which may considerably improve results in
some cases. When temperature and field variable dependencies are omitted, the
hardening laws for each backstress are
where
and the overall backstress is computed from the relation
where
is the number of backstresses, and ,
,
,
,
and
are material parameters that must be calibrated from cyclic test data.
are the initial kinematic hardening moduli, and
determine the rate at which the kinematic hardening moduli decrease with
increasing plastic deformation. ,
,
and
control the static recovery term. The kinematic hardening law can be separated
into a deviatoric part and a hydrostatic part; only the deviatoric part has an
effect on the material behavior. When ,
,
and
are zero, the model reduces to an isotropic hardening model. When all
and
equal zero, the linear Ziegler hardening law is recovered. Calibration of the
material parameters is discussed in
Usage and Calibration of the Kinematic Hardening Models
below.
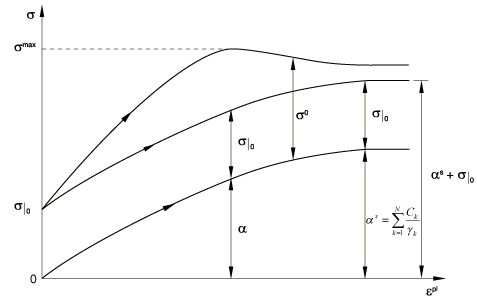
Figure 1
shows an example of nonlinear kinematic hardening with three backstresses.
Kinematic hardening model with three backstresses.
Each of the backstresses covers a different range of strains, and the linear
hardening law is retained for large strains.
The isotropic hardening behavior of the model defines the evolution of the
yield surface size, ,
as a function of the equivalent plastic strain, .
This evolution can be introduced by specifying
directly as a function of
in tabular form, by specifying
in user subroutine
UHARD (in
Abaqus/Standard
only), or by using the simple exponential law
where
is the yield stress at zero plastic strain and and
b are material parameters. is the
maximum change in the size of the yield surface, and b
defines the rate at which the size of the yield surface changes as plastic
straining develops. When the equivalent stress defining the size of the yield
surface remains constant (),
the model reduces to a nonlinear kinematic hardening model.
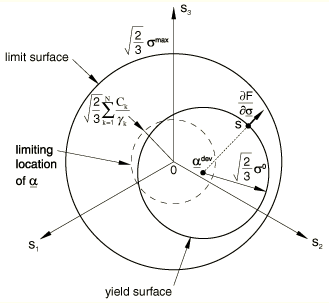
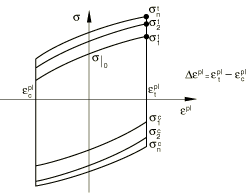
The evolution of the kinematic and the isotropic hardening components is
illustrated in
Figure 2
for unidirectional loading and in
Figure 3
for multiaxial loading. The evolution law for the kinematic hardening component
implies that the backstress is contained within a cylinder of radius
,
where
is the magnitude of at saturation
(large plastic strains). It also implies that any stress point must lie within
a cylinder of radius
(using the notation of
Figure 2)
since the yield surface remains bounded. At large plastic strain any stress
point is contained within a cylinder of radius ,
where
is the equivalent stress defining the size of the yield surface at large
plastic strain. If tabular data are provided for the isotropic component,
is the last value given to define the size of the yield surface. If user
subroutine
UHARD is used, this value will depend on your implementation;
otherwise, .
The model is applicable to strains up to about 25%–30%, and it is not
recommended for analyses in which these values are exceeded.
One-dimensional representation of the hardening in the nonlinear
isotropic/kinematic model. Three-dimensional representation of the hardening in the nonlinear
isotropic/kinematic model.
Multilinear Kinematic Hardening Model
The multilinear kinematic hardening model is defined by giving the value of
uniaxial yield stress as a function of uniaxial plastic strain (Figure 4).
The number of stress-plastic strain pairs given on the input curve determines
the number of subvolumes, ,
in the model. The yield strength of the kth subvolume
()
is calculated as
where ()
is the user-specified stress-plastic strain data and
is the shear modulus of the material. All the subvolumes are subjected to the
same total strain, and the total stress is calculated as a weighted sum of
stresses in the different subvolumes:
The weight of the kth subvolume is
where
is the hardening modulus between the kth data point and
the (k +1)th data point on the stress versus plastic
strain curve. The sum of the weights over all the subvolumes is one. It is
assumed that the hardening modulus beyond the last data point is zero.
Uniaxial stress versus plastic strain curve in the case of the
multilinear kinematic hardening model.
Predicted Material Behavior
In the kinematic hardening models the center of the yield surface moves in
stress space due to the kinematic hardening component. In addition, when the
nonlinear isotropic/kinematic hardening model is used, the yield surface range
may expand or contract due to the isotropic component. These features allow
modeling of inelastic deformation in metals that are subjected to cycles of
load or temperature, resulting in significant inelastic deformation and,
possibly, low-cycle fatigue failure. These models account for the following
phenomena:
Bauschinger effect
This effect is characterized by a reduced yield stress upon load reversal
after plastic deformation has occurred during the initial loading. This
phenomenon decreases with continued cycling. The linear kinematic hardening
component takes this effect into consideration, but a nonlinear component
improves the shape of the cycles. Further improvement of the shape of the cycle
can be obtained by using a nonlinear model with multiple backstresses. The
multilinear kinematic hardening model can also be used to model this effect.
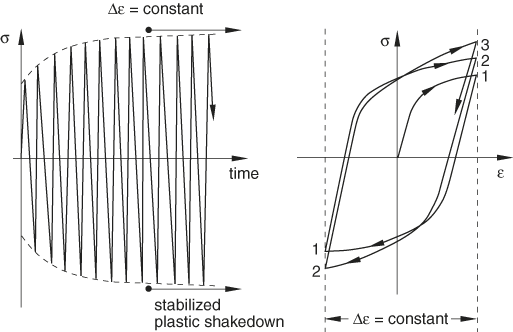
Cyclic hardening
with plastic shakedown
This phenomenon is characteristic of symmetric stress- or strain-controlled
experiments. Soft or annealed metals tend to harden toward a stable limit, and
initially hardened metals tend to soften.
Figure 5
illustrates the behavior of a metal that hardens under prescribed symmetric
strain cycles.
Plastic shakedown.
The kinematic hardening component of the models used alone predicts plastic
shakedown after one stress cycle. The combination of the isotropic component
together with the nonlinear kinematic component predicts shakedown after
several cycles.
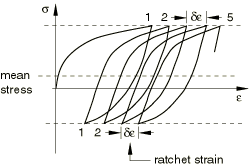
Ratchetting
Unsymmetric cycles of stress between prescribed limits will cause
progressive “creep” or “ratchetting” in the direction of the mean stress (Figure 6).
Ratchetting.
Typically, transient ratchetting is followed by stabilization (zero ratchet
strain) for low mean stresses, while a constant increase in the accumulated
ratchet strain is observed at high mean stresses. The nonlinear kinematic
hardening component, used without the isotropic hardening component, predicts
constant ratchet strain. The prediction of ratchetting is improved by adding
isotropic hardening, in which case the ratchet strain may decrease until it
becomes constant. However, in general the nonlinear hardening model with a
single backstress predicts a too significant ratchetting effect. A considerable
improvement in modeling ratchetting can be achieved by superposing several
kinematic hardening models (backstresses) and choosing one of the models to be
linear or nearly linear (),
which results in a less pronounced ratchetting effect. The multilinear
kinematic hardening model cannot predict this effect.
Relaxation of the
mean stress
This phenomenon is characteristic of an unsymmetric strain experiment, as
shown in
Figure 7.
Relaxation of the mean stress.
As the number of cycles increases, the mean stress tends to zero. The
nonlinear kinematic hardening component of the nonlinear isotropic/kinematic
hardening model accounts for this behavior.
Limitations
The linear kinematic model is a simple model that gives only a first
approximation of the behavior of metals subjected to cyclic loading, as
explained above. The nonlinear isotropic/kinematic hardening model can provide
more accurate results in many cases involving cyclic loading, but it still has
the following limitations:
The isotropic hardening is the same at all strain ranges. Physical
observations, however, indicate that the amount of isotropic hardening depends
on the magnitude of the strain range. Furthermore, if the specimen is cycled at
two different strain ranges, one followed by the other, the deformation in the
first cycle affects the isotropic hardening in the second cycle. Thus, the
model is only a coarse approximation of actual cyclic behavior. It should be
calibrated to the expected size of the strain cycles of importance in the
application.
The same cyclic hardening behavior is predicted for proportional and
nonproportional load cycles. Physical observations indicate that the cyclic
hardening behavior of materials subjected to nonproportional loading may be
very different from uniaxial behavior at a similar strain amplitude.
Usage and Calibration of the Kinematic Hardening Models
The linear kinematic model approximates the hardening behavior with a
constant rate of hardening. This hardening rate should be matched to the
average hardening rate measured in stabilized cycles over a strain range
corresponding to that expected in the application. A stabilized cycle is
obtained by cycling over a fixed strain range until a steady-state condition is
reached; that is, until the stress-strain curve no longer changes shape from
one cycle to the next. The multilinear kinematic hardening model does not have
the restriction of a constant hardening rate. The more general nonlinear model
will give better predictions but requires more detailed calibration.
Linear Kinematic Hardening Model
The test data obtained from a half cycle of a unidirectional tension or
compression experiment must be linearized, since this simple model can predict
only linear hardening. The data are usually based on measurements of the
stabilized behavior in strain cycles covering a strain range corresponding to
the strain range that is anticipated to occur in the application.
Abaqus
expects you to provide only two data pairs to define this linear behavior: the
yield stress, ,
at zero plastic strain and a yield stress, ,
at a finite plastic strain value, .
The linear kinematic hardening modulus, C, is determined
from the relation
You can provide several sets of two data pairs as a function of temperature
to define the variation of the linear kinematic hardening modulus with respect
to temperature. If the Hill yield surface is desired for this model, you must
specify a set of yield ratios, ,
independently (see
Hill Anisotropic Yield/Creep
for information on how to specify the yield ratios).
This model gives physically reasonable results for only relatively small
strains (less than 5%).
Nonlinear Isotropic/Kinematic Hardening Model
The evolution of the equivalent stress defining the size of the yield
surface, ,
as a function of the equivalent plastic strain, ,
defines the isotropic hardening component of the model. You can define this
isotropic hardening component through an exponential law or directly in tabular
form. It need not be defined if the yield surface remains fixed throughout the
loading. In
Abaqus/Explicit
if the Hill yield surface is desired for this model, you must specify a set of
yield ratios, ,
independently (see
Hill Anisotropic Yield/Creep
for information on how to specify the yield ratios). The Hill yield surface
cannot be used with this model in
Abaqus/Standard.
The material parameters
and
determine the kinematic hardening component of the model.
Abaqus
offers three different ways of providing data for the kinematic hardening
component of the model: the parameters
and
can be specified directly, half-cycle test data can be given, or test data
obtained from a stabilized cycle can be given. The experiments required to
calibrate the model are described below.
Optionally, you can include static recovery by specifying material
parameters ,
,
and .
If you specify these parameters, all of the kinematic hardening parameters must
be specified directly. Test data input is not supported.
Defining the Isotropic Hardening Component by the Exponential Law
Specify the material parameters of the exponential law
,
,
and b directly if they are already calibrated from test
data. These parameters can be specified as functions of temperature and/or
field variables.
Defining the Isotropic Hardening Component by Tabular Data
Isotropic hardening can be introduced by specifying the equivalent stress defining the
size of the yield surface, , as a tabular function of the equivalent plastic strain, . The simplest way to obtain these data is to conduct a symmetric
strain-controlled cyclic experiment with strain range . Since the material's elastic modulus is large compared to its
hardening modulus, this experiment can be interpreted approximately as repeated cycles
over the same plastic strain range (using the notation of Figure 8, where E is the Young's modulus of the material).
Symmetric strain cycle experiment.
The equivalent stress defining the size of the yield surface is at zero equivalent plastic strain; for the peak tensile stress points
it is obtained by isolating the kinematic component from the yield stress (see Figure 2) as
for each cycle i, where . Since the model predicts approximately the same backstress value in
each cycle at a particular strain level, . The equivalent plastic strain corresponding to is
Data pairs (, ), including the value at zero equivalent plastic strain, are specified in tabulated form.
You should provide the tabulated values defining the size of the yield surface for the
entire equivalent plastic strain range to which the material may be subjected. You can
provide the data as functions of temperature and/or field variables. The yield stress
at a given state is interpolated from this table of data, and it is assumed to remain
constant outside the range of the independent variables other than equivalent plastic
strain. Outside the range of equivalent plastic strains, you can choose if the yield
stress remains constant (default) or is extrapolated linearly (see Extrapolation of Material Data).
To obtain accurate cyclic hardening data, such as would be needed for low-cycle fatigue
calculations, the calibration experiment should be performed at a strain range, , that corresponds to the strain range anticipated in the analysis
because the material model does not predict different isotropic hardening behavior at
different strain ranges. This limitation also implies that, even though a component is
made from the same material, it may have to be divided into several regions with
different hardening properties corresponding to different anticipated strain ranges.
Field variables and field variable dependence of these properties can also be used for
this purpose.
Abaqus allows the specification of strain rate effects in the isotropic component of the
nonlinear isotropic/kinematic hardening model. The rate-dependent isotropic hardening
data can be defined by specifying the equivalent stress defining the size of the yield
surface, , as a tabular function of the equivalent plastic strain, , at different values of the equivalent plastic strain rate, .
Defining the Isotropic Hardening Component in a User Subroutine in Abaqus/Standard
Specify
directly in user subroutine
UHARD.
may be dependent on equivalent plastic strain and temperature. This method
cannot be used if the kinematic hardening component is specified by using
half-cycle test data.
Defining the Kinematic Hardening Component by Specifying the Material Parameters Directly
The parameters
and
can be specified directly as a function of temperature and/or field variables
if they are already calibrated from test data. When
depend on temperature and/or field variables, the response of the model under
thermomechanical loading will generally depend on the
history of temperature and/or field variables
experienced at a material point. This dependency on temperature-history is
small and fades away with increasing plastic deformation. However, if this
effect is not desired, constant values for
should be specified to make the material response completely independent of the
history of temperature and field variables. The algorithm currently used to
integrate the nonlinear isotropic/kinematic hardening model provides accurate
solutions if the values of
change moderately in an increment due to temperature and/or field variable
dependence; however, this algorithm may not yield a solution with sufficient
accuracy if the values of
change abruptly in an increment.
The last term in the hardening law described in
Nonlinear Isotropic/Kinematic Hardening Model
above that is defined by the parameters ,
,
and
is called a static recovery term. This term allows you to capture the stress
relaxation when modeling material deformation at elevated temperatures.
Therefore, you should include this term if a model is subjected to loading at
elevated temperatures that includes strain holds, such as commonly performed
cycling loading tests with hold periods at tension and/or compression. If the
static recovery term is defined, it is active only in quasi-static, fully
coupled temperature-displacement, fully coupled thermal-electrical-structural,
and implicit dynamic analyses.
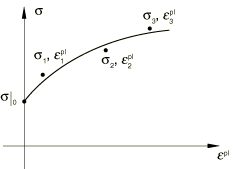
Defining the Kinematic Hardening Component by Specifying Half-Cycle Test Data
If limited test data are available,
and
can be based on the stress-strain data obtained from the first half cycle of a
unidirectional tension or compression experiment. An example of such test data
is shown in
Figure 9.
This approach is usually adequate when the simulation will involve only a few
cycles of loading.
Half cycle of stress-strain data.
For each data point ()
a value of
(
is the overall backstress obtained by summing all the backstresses at this data
point) is obtained from the test data as
where
is the user-defined size of the yield surface at the corresponding plastic
strain for the isotropic hardening component or the initial yield stress if the
isotropic hardening component is not defined.
Integration of the backstress evolution laws over a half cycle yields the
expressions
which are used for calibrating
and .
When test data are given as functions of temperature and/or field
variables,
Abaqus
determines several sets of material parameters (,
,...,
,
),
each corresponding to a given combination of temperature and/or field
variables. Generally, this results in temperature-history (and/or field
variable-history) dependent material behavior because the values of
vary with changes in temperature and/or field variables. This dependency on
temperature-history is small and fades away with increasing plastic
deformation. However, you can make the response of the material completely
independent of the history of temperature and field variables by using constant
values for the parameters .
This can be achieved by running a data check analysis first; an appropriate
constant values of
can be determined from the information provided in the data file during the
data check. The values for the parameters
and the constant parameters
can then be entered directly as described above.
If the model with multiple backstresses is used,
Abaqus
obtains hardening parameters for different values of initial guesses and
chooses the ones that give the best correlation with the experimental data
provided. However, you should carefully examine the obtained parameters. In
some cases it might be advantageous to obtain hardening parameters for
different numbers of backstresses before choosing the set of parameters.
Static recovery is not available when you specify half-cycle test data.
Defining the Kinematic Hardening Component by Specifying Test Data from a Stabilized Cycle
Stress-strain data can be obtained from the stabilized cycle of a specimen
that is subjected to symmetric strain cycles. A stabilized cycle is obtained by
cycling the specimen over a fixed strain range
until a steady-state condition is reached; that is, until the stress-strain
curve no longer changes shape from one cycle to the next. Such a stabilized
cycle is shown in
Figure 10.
Each data pair ()
must be specified with the strain axis shifted to ,
so that
and, thus, .
Stress-strain data for a stabilized cycle.
For each pair ()
values of
(
is the overall backstress obtained by summing all the backstresses at this data
point) are obtained from the test data as
where
is the stabilized size of the yield surface.
Integration of the backstress evolution laws over this uniaxial strain
cycle, with an exact match for the first data pair (),
provides the expressions
where
denotes the
backstress at the first data point (initial value of the
backstress). The above equations enable calibration of the parameters
and .
If the shapes of the stress-strain curves are significantly different for
different strain ranges, you may want to obtain several calibrated values of
and .
The tabular data of the stress-strain curves obtained at different strain
ranges can be entered directly in
Abaqus.
Calibrated values corresponding to each strain range are reported in the data
file, together with an averaged set of parameters, if model definition data are
requested (see
Controlling the Amount of analysis input file processor Information Written to the Data File).
Abaqus
will use the averaged set in the analysis. These parameters may have to be
adjusted to improve the match to the test data at the strain range anticipated
in the analysis.
When test data are given as functions of temperature and/or field
variables,
Abaqus
determines several sets of material parameters (,
,...,
,
),
each corresponding to a given combination of temperature and/or field
variables. Generally, this results in temperature-history (and/or field
variable-history) dependent material behavior because the values of
vary with changes in temperature and/or field variables. This dependency on
temperature-history is small and fades away with increasing plastic
deformation. However, you can make the response of the material completely
independent of the history of temperature and field variables by using constant
values for the parameters .
This can be achieved by running a data check analysis first; an appropriate
constant values of
can be determined from the information provided in the data file during the
data check. The values for the parameters
and the constant parameters
can then be entered directly as described above.
If the model with multiple backstresses is used,
Abaqus
obtains hardening parameters for different values of initial guesses and
chooses the ones that give the best correlation with the experimental data
provided. However, you should carefully examine the obtained parameters. In
some cases it might be advantageous to obtain hardening parameters for
different numbers of backstresses before choosing the set of parameters.
The isotropic hardening component should be defined by specifying the
equivalent stress defining the size of the yield surface at zero plastic
strain, as well as the evolution of the equivalent stress as a function of
equivalent plastic strain. If this component is not defined,
Abaqus
will assume that no cyclic hardening occurs so that the equivalent stress
defining the size of the yield surface is constant and equal to
(or the average of these quantities over several strain ranges when more than
one strain range is provided). Since this size corresponds to the size of a
saturated cycle, this is unlikely to provide accurate predictions of actual
behavior, particularly in the initial cycles.
Static recovery is not available if you specify test data from a
stabilized cycle.
Multilinear Kinematic Hardening Model
The multilinear kinematic hardening model can be calibrated using the test
data obtained from a unidirectional tension or compression experiment.
Abaqus
expects you to provide the stress-plastic strain data pairs to define this
multilinear behavior. The hardening modulus between the
kth data point and the th
data point on the stress versus plastic strain curve,
is determined from the relation
The data should be such that the hardening modulus does not increase with
plastic strain. The number of data points provided by the user determines the
number of subvolumes,
The computational cost and memory requirements increase with
Therefore, the number of data points used to approximate the stress-plastic
strain curve with a piecewise linear response should always be minimized.
You can provide several sets of data pairs as a function of temperature
and/or field variable. However, you must ensure that the total number of data
points or subvolumes corresponding to different temperatures and/or field
variables is the same.
Initial Conditions
When we need to study the behavior of a material that has already been
subjected to some hardening,
Abaqus
allows you to prescribe initial conditions for the equivalent plastic strain,
,
and for the backstresses, ,
in the case of the linear kinematic hardening model and the nonlinear
isotropic/kinematic hardening model. When the nonlinear isotropic/kinematic
hardening model is used, the initial conditions for each backstress,
,
must satisfy the condition
for the model to produce a kinematic hardening response.
Abaqus
allows the specification of initial backstresses that violate these conditions.
However, in this case the response corresponding to the backstress for which
the condition is violated produces kinematic softening response: the magnitude
of the backstress decreases with plastic straining from its initial value to
the saturation value. If the condition is violated for any of the backstresses,
the overall response of the material is not guaranteed to produce kinematic
hardening response. The initial condition for the backstress has no limitations
when the linear kinematic hardening model is used.
You can specify the initial values of
and
directly as initial conditions (see
Initial Conditions).
User Subroutine Specification in Abaqus/Standard
For more complicated cases in
Abaqus/Standard initial
conditions can be defined through user subroutine
HARDINI.
Elements
The linear kinematic hardening model and the nonlinear isotropic/kinematic
hardening model can be used with elements in
Abaqus/Standard
that include mechanical behavior (elements that have displacement degrees of
freedom), except some beam elements in space. Beam elements in space that
include shear stress caused by torsion (i.e., not thin-walled, open sections)
and do not include hoop stress (i.e., not PIPE elements) cannot be used with the nonlinear kinematic hardening
model. In
Abaqus/Explicit,
the linear kinematic hardening model and the nonlinear isotropic/kinematic
hardening model can be used with any elements that include mechanical behavior,
with the exception of one-dimensional elements (beams, pipes, and trusses) when
the models are used with the Hill yield surface. The multilinear kinematic
hardening model can be used only in
Abaqus/Standard
with plane strain, generalized plane strain, axisymmetric, and
three-dimensional solid (continuum) elements.
Total kinematic hardening shift tensor components, .
ALPHAk
kinematic hardening shift tensor components ().
ALPHAN
All tensor components of all the kinematic hardening shift tensors, except
the total shift tensor.
PEEQ
Equivalent plastic strain,
where
is the initial equivalent plastic strain (zero or user-specified; see
Initial Conditions).
PENER
Plastic work, defined as: .
This quantity is not guaranteed to be monotonically increasing for kinematic
hardening models. To get a quantity that is monotonically increasing, the
plastic dissipation needs to be computed as: .
In
Abaqus/Standard
this quantity can be computed as a user-defined output variable in user
subroutine
UVARM.