Pore pressure, hydrostatic fluid pressure, or acoustic pressure
9
Electric potential
10
Connector material flow (units of length)
11
Temperature (or normalized concentration in mass diffusion
analysis)
12
Second temperature (for shells or beams)
13
Third temperature (for shells or beams)
14
Etc.
30
20th temperature (for shells or beams)
32
Electric potential in the electrolyte
33
Ion concentration in the electrolyte
Here the x-, y-, and
z-directions coincide with the global
X-, Y-, and
Z-directions, respectively; however, if a local
transformation is defined at a node (see
Transformed Coordinate Systems),
they coincide with the local directions defined by the transformation.
A maximum of 20 temperature values (degrees of freedom 11 through 30) can be
defined for shell or beam elements in
Abaqus/Standard.
Axisymmetric Elements
The displacement and rotation degrees of freedom in axisymmetric elements
are referred to as follows:
1
r-displacement
2
z-displacement
5
Rotation about the z-axis (for axisymmetric
elements with twist), in radians
6
Rotation in the r–z
plane (for axisymmetric shells), in radians
Here the r- and z-directions
coincide with the global X- and
Y-directions, respectively; however, if a local
transformation is defined at a node (see
Transformed Coordinate Systems),
they coincide with the local directions defined by the transformation.
Electromagnetic Elements
Electromagnetic elements in
Abaqus/Standard
are used to define the element shape and to discretize the continuum. The eddy
current and magnetostatic analyses formulations use magnetic vector potential
as a degree of freedom (see
Boundary Conditions
and
Boundary Conditions).
Activation of Degrees of Freedom
Abaqus/Standard and Abaqus/Explicit activate only those degrees of freedom needed at a node. Therefore, some of the degrees
of freedom listed above may not be used at all nodes in a model, because each element type
uses only those degrees of freedom that are relevant. For example, two-dimensional solid
(continuum) stress/displacement elements use only degrees of freedom 1 and 2. The degrees
of freedom actually used at any node are the envelope of those needed in each element that
shares the node.
Internal Variables in Abaqus/Standard
In addition to the degrees of freedom listed above,
Abaqus/Standard
uses internal variables (such as Lagrange multipliers to impose constraints)
for some elements. Normally you need not be concerned with these variables, but
they may appear in error and warning messages and are checked for satisfaction
of nonlinear constraints during iteration. Internal variables are always
associated with internal nodes, which have negative numbers to distinguish them
from user-defined nodes.
Coordinate Systems
The basic coordinate system in
Abaqus
is a right-handed, rectangular Cartesian system. You can choose other systems
locally for input (see
Node Definition),
for output of nodal variables (displacements, velocities, etc.) and point load
or boundary condition specification (see
Transformed Coordinate Systems),
and for material or kinematic joint specification (see
Orientations).
All coordinate systems must be right-handed.
Units
Abaqus
has no units built into it except for rotation and angle measures. Therefore,
the units chosen must be self-consistent, which means that derived units of the
chosen system can be expressed in terms of the fundamental units without
conversion factors.
Rotation and Angle Measures
In
Abaqus
rotational degrees of freedom are expressed in radians, and all other angle
measures are expressed in degrees (for example, phase angles).
International System of Units (SI)
The International System of units (SI) is
an example of a self-consistent set of units. The fundamental units in the
SI system are length in meters (m), mass in
kilograms (kg), time in seconds (s), temperature in degrees kelvin (K), and
electric current in amperes (A). The units of secondary or derived quantities
are based on these fundamental units. An example of a derived unit is the unit
of force. A unit of force in the SI system is
called a newton (N):
Similarly, a unit of electrical charge in the
SI system is called a coulomb (C):
Another example is the unit of energy, called a joule (J):
The unit of electrical potential in the SI
system is the volt, which is chosen such that
Sometimes the standard units are not convenient to work with. For example,
Young's modulus is frequently specified in terms of megapascals (MPa) (or,
equivalently, N/mm2), where 1 pascal = 1 N/m2. In this
case the fundamental units could be tonnes (1 tonne = 1000 kilograms),
millimeters, and seconds.
American or English Units
American or English units can cause confusion since the naming conventions are not as clear as in
the SI system. For example, 1 pound force (lbf) gives 1
pound mass (lbm) an acceleration of g ft/sec2, where
g is the value of acceleration due to gravity. If pounds force,
feet (ft), and seconds are taken as fundamental units, the derived unit of mass is lbf
sec2/ft. Since density is commonly given in handbooks as lbm/in3,
it must be converted to lbf sec2/ft4 by
Frequently it is not made clear in handbooks whether
stands for lbm or lbf. You need to check that the values used make up a
consistent set of units.
Two other units that cause difficulty are the slug, defined as the mass that is accelerated at 1
ft/sec2 by 1 lbf, and the poundal, defined as the force required to
accelerate 1 lbm at 1 ft/sec2. Useful conversions are
and
where g is the magnitude of the acceleration due to
gravity in ft/sec2.
Symbols Used in Abaqus for Units
Units are indicated for the value to be given on load and flux types as
follows:
Dimension
Indicator
Example (S.I. units)
length
L
meter
mass
M
kilogram
time
T
second
temperature
degree Celsius
electric current
A
ampere
force
F
newton
energy
J
joule
electric charge
C
coulomb
electric potential
volt
mass concentration
P
Parts per million
fluid electric potential
volt
ion concentration in the electrolyte
mol per cubic meter
Defining a Unit System for an Abaqus/Standard Substructure for a Simpack Flexible Body
In
Abaqus/Standard
you can specify a unit system in the model to use when translating to other
formats. In a matrix generation procedure, the unit system is stored on the
binary SIM file containing the generated
matrices. In a substructure generation procedure, the unit system is stored on
the binary SIM file containing the
substructure.
If you generate flexible body entities from an Abaqus/Standard substructure for the Simpack flexible body dynamics solver, you must specify units. Two
approaches are available. In the first approach you specify a unit system in the Abaqus/Standard model directly. The specified unit system is not used during the substructure
generation procedure. However, the unit information is stored with the substructure and is
accessed during the creation of the flexible body. In the second approach (in which you do
not specify the unit system), you must run the abaqus tosimpack
translator in stand-alone mode and define the model units on the command line (see Translating an Abaqus Substructure to a Simpack Flexible Body).
You define the units of a mechanical system by specifying one of the basic
triples: length-mass-time or
length-force-time. These two methods are mutually
exclusive. If you specify length-mass-time, the
force unit is defined implicitly. If you specify
length-force-time, the mass unit is defined
implicitly. You specify a unit symbol that defines the primary conversion
factor, as shown in the tables below. The primary conversion factor is the
number that
Abaqus
multiplies by the SI unit to obtain the
current model unit. For example, if the
Abaqus
model length unit is mm, the primary conversion factor is 0.001. To use units
that are not in the list of unit symbols (such as the angstrom unit), you can
specify a secondary conversion factor. This is another multiplier for the
conversion from the
Abaqus
model units to the SI system.
Table 1. Length unit symbols.
Unit Name
Unit Symbol
Primary Conversion Factor
Meter (default)
m
1.0
Centimeter
cm
1.0E-2
Millimeter
mm
1.0E-3
Kilometer
km
1.0E+3
Inch
in
0.0254
Foot
ft
0.3048
Yard
yd
0.9144
Mile
mi
1609.344
Table 2. Mass unit symbols.
Unit Name
Unit Symbol
Primary Conversion Factor
Kilogram (default)
kg
1.0
Gram
g
1.0E-3
Tonne (metric ton)
t
1.0E+3
Pound
lb
0.45359237
Kilopound
klb
453.59237
Ounce
oz
0.0283495
Slug
slug
14.593903
Slinch (dozen slug)
slinch
175.126835246476
US ton (short ton)
uton
907.185
Table 3. Time unit symbols.
Unit Name
Unit Symbol
Primary Conversion Factor
Second (default)
s
1.0
Millisecond
ms
1.0E-3
Hour
h
3600.0
Minute
min
60.0
Day
d
86400.0
Table 4. Force unit symbols.
Unit Name
Unit Symbol
Primary Conversion Factor
Newton (default)
N
1.0
Pound-force
lbf
4.44822161526
Kilogram-force
kgf
9.80665
Ounce-force
ozf
0.2780139
Dyne
dyne
1.0E-5
Kilonewton
kN
1.0E+3
Kilopound-force
klbf
4448.22161526
Tonne-force
tf
9.80665E+3
Poundal
pdl
0.138254954
Time Measures
Abaqus
has two measures of time—step time and total time. Except for certain linear
perturbation procedures, step time is measured from the beginning of each step.
Total time starts at zero and is the total accumulated time over all general
analysis steps (including restart steps; see
Restarting an Analysis).
Total time does not accumulate during linear perturbation steps.
Local Tangent Directions on Surfaces in Space
Local tangent directions are needed on surfaces in space; for example, to
provide a convention for describing components of slip on an element-based
contact surface or components of stress and strain in a shell. The convention
used in
Abaqus
for such directions is as follows.
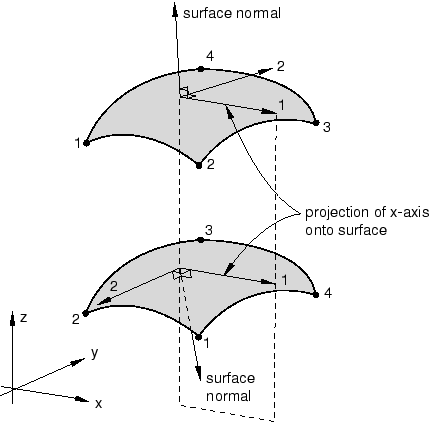
The default local 1-direction is the projection of the global
x-axis onto the surface. If the global
x-axis is within 0.1° of being normal to the surface, the
local 1-direction is the projection of the global z-axis
onto the surface. The local 2-direction is then at right angles to the local
1-direction, so that the local 1-direction, local 2-direction, and the positive
normal to the surface form a right-handed set (see
Figure 1).
The positive normal direction is defined in an element by the right-hand
rotation rule going around the nodes of the element. The local surface
directions can be redefined; see
Orientations.
For “line”-type surfaces defined on beam, pipe, or truss elements in space,
the default local 1-direction and 2-direction are tangential and transverse to
the elements. In this case the local surface directions can also be redefined
as described in
Orientations.
Rotation of the Local Directions
For geometrically linear analysis, stress and strain components are given by
default in the material directions in the reference (initial) configuration.
For geometrically nonlinear analysis, small-strain shell elements in
Abaqus/Standard
(S4R5, S8R, S8R5, S8RT, S9R5, STRI3, and STRI65) use a total Lagrangian strain, and the stress and strain
components are given relative to material directions in the reference
configuration. Gasket elements are small-strain small-displacement elements,
and the components are output by default in the behavior directions in the
reference configuration.
For finite-membrane-strain elements (all membrane elements, S3/S3R, S4, S4R, SAX, and SAXA elements) and for small-strain shell elements in
Abaqus/Explicit,
the material directions rotate with the average rigid body motion of the
surface to form the material directions in the current configuration. Stress
and strain components in these elements are given relative to these material
directions in the current configuration.
For a more thorough discussion of the definition of the rotated coordinate
directions in membrane elements; S3/S3R, S4, and S4R elements; S3RS, S4RS, and S4RSW elements; and SAXA elements, see:
You can determine whether the local system associated with a user-defined
section is fixed or rotates with the average rigid body motion; see
Section Output from Abaqus/Standard
for details.
You can determine whether the local system associated with an integrated
output section is fixed, translates with average rigid body motion, or
translates and rotates with the average rigid body motion; see
Integrated Output Section Definition
for details.
When defining material properties, the convention used for stress and strain
components in
Abaqus
is that they are ordered:
Direct stress in the 1-direction
Direct stress in the 2-direction
Direct stress in the 3-direction
Shear stress in the 1–2 plane
Shear stress in the 1–3 plane
Shear stress in the 2–3 plane
For example, a fully anisotropic, linear elasticity matrix is
The 1-, 2-, and 3-directions depend on the element type chosen. For solid
elements the defaults for these directions are the global spatial directions.
For shell and membrane elements the defaults for the 1- and 2-directions are
local directions in the surface of the shell or membrane, as defined in
About the Element Library.
In both cases the 1-, 2-, and 3-directions can be changed as described in
Orientations.
For geometrically nonlinear analysis with solid elements, the default
(global) directions do not rotate with the material. However, user-defined
orientations do rotate with the material.
Abaqus/Explicit
stores the stress and strain components internally in a different order:
,
,
,
,
,
.
For geometrically nonlinear analysis, the internally stored components rotate
with the material, regardless of whether or not a user-defined orientation is
used. This distinction is important when a user subroutine (such as
VUMAT) is used.
Nonisotropic Material Behavior
When nonisotropic material behavior is defined in continuum elements, a
user-defined orientation is necessary for the anisotropic behavior to be
associated with material directions. See
State storage
for a description of how material directions rotate.
Zero-Valued Stress Components
Stress components that are always zero are omitted from storage. For
example, in plane stress
Abaqus
stores only the two direct components and one shear component of stress and
strain in the plane where the stress values are nonzero.
Shear Strains
Abaqus
always reports shear strain as engineering shear strain,
:
Stress and Strain Measures
The stress measure used in
Abaqus
is Cauchy or “true” stress, which corresponds to the force per current area.
See
Stress measures
and
Stress rates
for more details on stress measures.
For geometrically nonlinear analysis, a large number of different strain measures exist. Unlike
“true” stress, there is no clearly preferred “true” strain. For the same physical
deformation different strain measures report different values in large-strain analysis. The
optimal choice of strain measure depends on analysis type, material behavior, and (to some
degree) personal preference. See Strain measures for more details
on strain measures.
By default, the strain output in
Abaqus/Standard is
the “integrated” total strain (output variable E). For large-strain shells, membranes, and solid elements in
Abaqus/Standard
two other measures of total strain can be requested: logarithmic strain (output
variable LE) and nominal strain (output variable NE).
Logarithmic strain (output variable LE) is the default strain output in
Abaqus/Explicit;
nominal strain (output variable NE) can be requested as well. The “integrated” total strain is not
available in
Abaqus/Explicit.
Total (Integrated) Strain
The default “integrated” strain measure, E, output by
Abaqus/Standard
to the data (.dat) and results (.fil)
files for all elements that can handle finite strain is obtained by integrating
the strain rate numerically in a material frame of reference:
where
and
are the total strains at increments
and n, respectively; is the
incremental rotation tensor; and is
the total strain increment from increment n to
.
For elements that use a corotational coordinate system (finite-strain shells,
membranes, and solid elements with user-defined orientations), the above
equation simplifies to
The strain increment is obtained by integration of the rate of deformation
over the time
increment:
This strain measure is appropriate for elastic-(visco)plastic or
elastic-creeping materials, because the plastic strains and creep strains are
obtained by the same integration procedure. In such materials the elastic
strains are small (because the yield stress is small compared to the elastic
modulus), and the total strains can be compared directly with the plastic
strains and creep strains.
If the principal directions of straining rotate with respect to the material
axes, the resulting strain measure cannot be related to the total deformation,
regardless whether a spatial or corotational coordinate system is used. If the
principal directions remain fixed in the material axes, the strain is the
integration of the rate of deformation,
which is equivalent to the logarithmic strain discussed later.
Green's Strain
For small-strain shells and beams in
Abaqus/Standard,
the default strain measure, E, is Green's strain:
where is the deformation
gradient and is the identity
tensor. This strain measure is appropriate for the small-strain, large-rotation
approximation used in these elements. The components of
represent strain along directions in the original configuration. The
small-strain shells and beams should not be used in finite-strain analysis with
either elastic-plastic or hyperelastic material behavior, since incorrect
analysis results may be obtained or program failure may occur.
Nominal Strain
The nominal strain, NE, is
where
is the left stretch tensor,
are the principal stretches, and
are the principal stretch directions in the current configuration. The
principal values of nominal strain are, therefore, the ratios of change in
length to length in the reference configuration in the principal directions,
thus giving a direct measure of deformation.
Logarithmic Strain
The logarithmic strain, LE, is
where the variables are as defined earlier for nominal strain. This is also the strain output for
hyperelastic materials. For a hyperviscoelastic material, the logarithmic elastic strain
EE is computed from the current
(relaxed) stress state, and the viscoelastic strain
CE is computed as
LE −
EE.
Stress Invariants
Many of the constitutive models in
Abaqus
are formulated in terms of stress invariants. These invariants are defined as
the equivalent pressure stress,
the Mises equivalent stress,
and the third invariant of deviatoric stress,
where is the deviatoric
stress, defined as
Finite Rotations
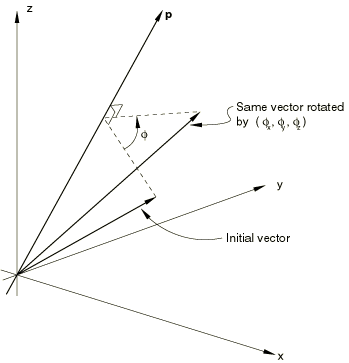
The following convention is used for finite rotations in space: Define
,
,
as “rotations” about the global X, Y,
and Z-axes (that is, degrees of freedom 4, 5, and 6 at a
node). Then define
where
The direction is then the axis of
rotation, and
is the angular rotation (in radians) about the axis according to the
right-hand rule (see
Figure 2).
Definition of finite rotation.
The value of
is not uniquely determined. In large-rotation problems where the overall
rotation exceeds ,
any multiple of
can be added or subtracted, which may lead to discontinuous output values for
the rotation components. If rotations larger than
about one axis occur in the positive (negative) direction in
Abaqus/Standard,
the rotation output varies discontinuously between 0 and
().
In
Abaqus/Explicit
the rotation output varies in all cases between
and .
This convention provides straightforward input of kinematic boundary
conditions and moments in most cases and simple interpretation of the output.
The rotations output by
Abaqus
represent a single rotation from the reference configuration to the current
configuration about a fixed axis. The output does not follow the history of
rotation at a node. In addition, this convention reduces to the usual
convention for small rotations, even in the case of small rotations superposed
on an initial finite rotation (such as might be considered in the study of
small vibrations about a predeformed state).
Compound Rotations
Because finite rotations are not additive, the way they must be specified is
a bit different from the way other boundary conditions are specified: the
increment in rotation specified over a step must be the rotation needed to
rotate the node from the configuration at the beginning of the step to that
desired at the end of the step. It is not enough to rotate the node over this
step to a total rotation vector that would have taken the node into its final
configuration if applied on the node in some other initial reference
configuration. If an increment of rotation
is needed to rotate from the rotation boundary condition
at the beginning of the step (and at the end of the previous step) to its final
position at the end of the step, the boundary condition must be specified such
that the rotation vector is
at the end of the step. If the direction of the rotation vector is constant,
this method of specifying rotation boundary conditions and the total rotation
vector will be the same.
Example
As an example of how to specify compound finite rotations and to interpret
finite rotation output, consider the following example of the rotation of a
beam.
The beam initially lies along the x-axis. We want to
perform the compound rotation, where (Step 1) the beam is rotated by 60° about
the z-axis, followed by (Step 2) a 90° spin of the beam
about itself, followed by (Step 3) a 90° rotation of the beam about an axis
perpendicular to the beam in the x–y
plane, such that the beam finishes on the z-axis.
This compound rotation is achieved in three steps with applied rotation
vectors ,
,
and ,
where
For this example ,
,
and .
Here
represents the magnitude of each finite rotation about the (unit length)
rotation axis. The rotation vectors above are applied in each of the three
steps on the configuration at the beginning of that step. It is most
straightforward to prescribe these rotations with velocity-type boundary
conditions. For convenience, the default amplitude reference in
Abaqus for
a velocity-type boundary condition is a constant value of one.
A typical
Abaqus
step definition for this example, where node 1 is pinned at the origin and the
rotation is applied to node 2, is as follows:
The above method for applying finite-rotation boundary conditions (using a
velocity-type boundary condition with the default constant amplitude
definition) is strongly recommended. However, if the rotation boundary
conditions are applied as displacement-type boundary conditions, the input
syntax would change.
The
Abaqus/Standard
convention for boundary condition specification within a step is to specify the
total or final boundary state. In such a case the specified boundary conditions
from all of the previous steps must be added to the incremental rotation vector
components. The
Abaqus/Standard
step definitions from above would change to:
The boundary conditions in Steps 2 and 3 are the sum of the incremental
rotation components plus the rotation boundary conditions specified in the
previous steps.
In Abaqus/Explicit references to amplitude definitions should be used such that there are no jumps in
displacement across the steps. It is often convenient to use amplitude definitions given
in terms of total time for this purpose. The displacement boundary conditions will be
applied incrementally based on the increment in the value of amplitude curve over the
time increment. Therefore, any sudden jumps in displacement at the beginning of a step
introduced either without the amplitude curves or with two amplitude curves is ignored
(see Boundary Conditions). The Abaqus/Explicit step definitions for the above example would change to:
AMPLITUDE, TIME=TOTAL TIME, NAME=RAMPUR1
0., 0., 0.001, 0., 0.002, 0.785398, 0.003, 2.145748
AMPLITUDE, TIME=TOTAL TIME, NAME=RAMPUR2
0., 0., 0.001, 0., 0.002, 1.36035, 0.003, 0.574952
AMPLITUDE, TIME=TOTAL TIME, NAME=RAMPUR3
0., 0., 0.001, 1.047198, 0.002, 1.047198, 0.003, 1.047198
STEP
Step 1: Rotate 60 degrees about the z-axis
DYNAMIC, EXPLICIT
, 0.001
BOUNDARY, AMP=RAMPUR1
2, 4, 4, 1.0
BOUNDARY, AMP=RAMPUR2
2, 5, 5, 1.0
BOUNDARY, AMP=RAMPUR3
2, 6, 6, 1.0
END STEP
**
STEP
Step 2: Rotate 90 degrees about the beam axis
DYNAMIC, EXPLICIT
, 0.001
END STEP
**
STEP
Step 3: Rotate beam onto z-axis
DYNAMIC, EXPLICIT
, 0.001
END STEP
The boundary conditions in Steps 2 and 3 are the sum of the incremental
rotation components plus the rotation boundary conditions specified in the
previous steps.
The
Abaqus
output of the rotation field at the end of Step 3 is
We see that none of the individual components of the specified boundary
conditions appears in the final rotation output. The final rotation output
represents the rotation vector required to obtain the final orientation in a
single step.
Suppose that in Step 3 of the previous example we want to apply the
rotation vector
at node 1 instead of at node 2. If the rotation is applied incrementally, the
Abaqus/Standard
step definition is as follows:
and the
Abaqus/Explicit
step definition is similar. It is necessary to remove the rotation boundary
conditions that are in effect at node 2.
As mentioned previously, using velocity-type boundary conditions is the
preferred method for applying finite-rotation boundary conditions. If the
rotation boundary condition is to be applied as a displacement-type boundary
condition, we must first retrieve the rotation field at node 1 at the end of
Step 2. The
Abaqus
output of this rotation field is
These rotation vector components must then be added to the incremental rotation vector
components we want to prescribe in Step 3. The Abaqus/Standard step definition would change to
The boundary conditions are again specified in the Abaqus/Explicit input using amplitude curves to avoid any sudden jump in their values at the
beginning of the step. As stated above and in Boundary Conditions, any jumps
in the displacement values are ignored and the boundary is maintained at the previous
values.
As this last procedure clearly demonstrates, it is simpler to apply
finite-rotation boundary conditions as velocity-type boundary conditions rather
than as displacement-type boundary conditions. The recommended method of
specifying finite-rotation boundary conditions is also described in
Boundary Conditions.
For further discussion of how finite rotations are accumulated, see
Rotation variables.