A boundary impedance specifies the relationship between the pressure of an
acoustic medium and the normal motion at the boundary. Such a condition is
applied, for example, to include the effect of small-amplitude “sloshing” in a
gravity field or the effect of a compressible, possibly dissipative, lining
(such as a carpet) between an acoustic medium and a fixed, rigid wall or
structure.
The impedance boundary condition at any point along the acoustic medium
surface is governed by
where
is the acoustic particle velocity in the outward normal direction of the
acoustic medium surface,
p
is the acoustic pressure,
is the time rate of change of the acoustic pressure,
is the proportionality coefficient between the pressure and the displacement
normal to the surface, and
is the proportionality coefficient between the pressure and the velocity
normal to the surface.
This model can be conceptualized as a spring and dashpot in series placed
between the acoustic medium and a rigid wall. The spring and dashpot parameters
are
and ,
respectively, defined per unit area of the interface surface. These reactive
acoustic boundaries can have a significant effect on the pressure distribution
in the acoustic medium, in particular if the coefficients
and
are chosen such that the boundary is energy absorbing. If no impedance, loads,
or fluid-solid coupling are specified on the surface of an acoustic mesh, the
acceleration of that surface is assumed to be zero. This is equivalent to the
presence of a rigid wall at that boundary.
Use of the subspace-based steady-state dynamics procedure is not recommended
if reactive acoustic boundaries with strong absorption characteristics are
used. Since the effect of
is not taken into account in an eigenfrequency extraction step, the eigenmodes
may have shapes that are significantly different from the exact solution.
Sloshing of a Free Surface
To model small-amplitude “sloshing” of a free surface in a gravity field,
set
and ,
where
is the density of the fluid and g is the gravitational
acceleration (assumed to be directed normal to the surface). This relation
holds for small volumetric drag.
Acoustic-Structural Interface
The impedance boundary condition can also be placed at an
acoustic-structural interface. In this case the boundary condition can be
conceptualized as a spring and dashpot in series placed between the acoustic
medium and the structure. The expression for the outward velocity still holds,
with
now being the relative outward velocity of the acoustic medium and the
structure:
where
is the velocity of the structure,
is the velocity of the acoustic medium at the boundary, and
is the outward normal
to the acoustic medium.
Steady-State Dynamics
In a steady-state dynamics analysis the expression for the outward velocity
can be written in complex form as
where is the circular
frequency (radians/second) and we define
The term
is the complex admittance of the boundary, and
is its complex impedance. Thus, a required complex impedance or admittance
value can be entered for a given frequency by specifying the parameters
and .
Specifying Impedance Conditions
You specify impedance coefficient data in an impedance property table. You
can describe an impedance table in terms of the admittance parameters,
and ,
or in terms of the real and imaginary parts of the impedance. In the latter
case
Abaqus
converts the user-defined table of impedance data to the admittance parameter
form for the analysis.
The parameters in the table can be specified over a range of frequencies.
The required values are interpolated from the table in steady-state harmonic
response analysis only; for other analysis types, only the first table entry is
used. The name of the impedance property table is referred to from a
surface-based or element-based impedance definition.
In a steady-state dynamics analysis you cannot specify impedance conditions
on a surface on which incident wave loading is applied.
Specifying Surface-Based Impedance Conditions
You can define the impedance condition on a surface. The impedance is
applied to element edges in two dimensions and to element faces in three
dimensions. The element-based surface (see
Element-Based Surface Definition)
contains the element and face information.
Specifying Element-Based Impedance Conditions
Alternatively, you can define the impedance condition on element faces.
The impedance is applied to element edges in two dimensions and to element
faces in three dimensions. The edge or face of the element upon which the
impedance is placed is identified by an impedance load type and depends on the
element type (see
About the Element Library).
Modifying or Removing Impedance Conditions
Impedance conditions can be added, modified, or removed as described in
About Loads.
Radiation Boundaries for Exterior Problems
An exterior problem such as a structure vibrating in an acoustic medium of
infinite extent is often of interest. Such a problem can be modeled by using
acoustic elements to model the region between the structure and a simple
geometric surface (located away from the structure) and applying a radiating
(nonreflecting) boundary condition at that surface. The radiating boundary
conditions are approximate, so the error in an exterior acoustic analysis is
controlled not only by the usual finite element discretization error but also
by the error in the approximate radiation condition. In
Abaqus
the radiation boundary conditions converge to the exact condition in the limit
as they become infinitely distant from the radiating structure. In practice,
these radiation conditions provide accurate results when the surface is at
least one-half wavelength away from the structure at the lowest frequency of
interest.
Except in the case of a plane wave absorbing condition with zero volumetric
drag, the impedance parameters in
Abaqus/Standard are
frequency dependent. The frequency-dependent parameters are used in the
direct-solution and subspace-based steady-state dynamics procedures. In direct
time integration procedures the zero-drag values for the constants
and
are used. These values will give good results when the drag is small. (Small
volumetric drag here means
where
is the density of the acoustic medium and is the circular
excitation frequency or sound wave frequency.)
A direct-solution steady-state dynamics procedure (Direct-Solution Steady-State Dynamic Analysis)
must include both real and complex terms if nonreflecting (also called quiet)
boundaries are present, because nonreflecting boundaries represent a form of
damping in the system.
Several radiating boundary conditions are implemented as special cases of
the impedance boundary condition. The details of the formulation are given in
Coupled acoustic-structural medium analysis.
Planar Nonreflecting Boundary Condition
The simplest nonreflecting boundary condition available in
Abaqus
assumes that the plane waves are normally incident on the exterior surface.
This planar boundary condition ignores the curvature of the boundary and the
possibility that waves in the simulation may impinge on the boundary at an
arbitrary angle. The planar nonreflecting condition provides an approximation:
acoustic waves are transmitted across such a boundary with little reflection of
energy back into the acoustic medium. The amount of energy reflected is small
if the boundary is far away from major acoustic disturbances and is reasonably
orthogonal to the direction of dominant wave propagation. Thus, if an exterior
(unbounded domain) problem is to be solved, the nonreflecting boundary should
be placed far enough away from the sound source so that the assumption of
normally impinging waves is sufficiently accurate. This condition would be
used, for example, on the exhaust end of a muffler.
Improved Nonreflecting Boundary Condition for Plane Waves
For the planar nonreflecting boundary condition to be accurate, the plane
waves must be normally incident to a planar boundary. However, the angle of
incidence is generally unknown in advance. A radiating boundary condition that
is exact for plane waves with arbitrary angles of incidence is available in
Abaqus.
The radiating boundary can have any arbitrary shape. This boundary impedance is
implemented only for transient dynamics.
Geometry-Based Nonreflecting Boundary Conditions
Four other types of absorbing boundary conditions that take the geometry of
the radiating boundary into account are implemented in
Abaqus:
circular, spherical, elliptical, and prolate spheroidal. These boundary
conditions offer improved performance over the planar nonreflecting condition
if the nonreflecting surface has a simple, convex shape and is close to the
acoustic sources. The various types of absorbing boundaries are selected by
defining the required geometric parameters for the element-based or
surface-based impedance definition.
The geometric parameters affect the nonreflecting surface impedance. To
specify a nonreflecting boundary that is circular in two dimensions or a right
circular cylinder in three dimensions, you must specify the radius of the
circle. To specify a nonreflecting spherical boundary condition, you must
specify the radius of the sphere. To specify a nonreflecting boundary that is
elliptical in two dimensions or a right elliptical cylinder in three dimensions
or to specify a prolate spheroid boundary condition, you must specify the
shape, location, and orientation of the radiating surface. The two parameters
specifying the shape of the surface are the semimajor axis and the
eccentricity. The semimajor axis, a, of an ellipse or
prolate spheroid is analogous to the radius of a sphere: it is one-half the
length of the longest line segment connecting two points on the surface. The
semiminor axis, b, is one-half the length of the longest
line segment that connects two points on the surface and is orthogonal to the
semimajor axis line. The eccentricity, ,
is defined as .
Combining Different Radiation Conditions in the Same Problem
Since the radiation boundary conditions for the different shapes are
spatially local and do not involve discretization in the infinite exterior
domain, an exterior boundary can consist of the combination of several shapes.
The appropriate boundary condition can then be applied to each part of the
boundary. For example, a circular cylinder can be terminated with hemispheres
(see
Fully and sequentially coupled acoustic-structural analysis of a muffler),
or an elliptical cylinder can be terminated with prolate spheroidal halves.
This modeling technique is most effective if the boundaries between surfaces
are continuous in slope as well as displacement, although this is not
essential.
Concentrated Pressure-Conjugate Load
Distributed “loads” on acoustic elements can be interpreted as normal
pressure gradients per unit density (dimensions of force per unit mass or
acceleration). When used in
Abaqus,
the applied distributed loads must be integrated over a surface area, yielding
a quantity with dimensions of force times area per unit mass (or volumetric
acceleration). For analyses in the frequency domain and for transient dynamic
analyses where the volumetric drag is zero, this acoustic load is equal to the
volumetric acceleration of the fluid on the boundary. For example, a
horizontal, flat rigid plate oscillating vertically imposes an acceleration on
the acoustic fluid and an acoustic “load” equal to this acceleration times the
surface area of the plate. For the transient dynamics formulation in the
presence of volumetric drag, however, the specified “load” is slightly
different. It is also a force times area per unit mass; but this force effect
is partially lost to the volumetric drag, so the resulting volumetric
acceleration of the fluid on the boundary is reduced. Noting this distinction
for the special case of volumetric drag and transient dynamics, it is
nevertheless convenient to refer to acoustic “loads” as volumetric
accelerations in general.
An inward volumetric acceleration can be applied by a positive concentrated
load on degree of freedom 8 at a node of an acoustic element that is on the
boundary of the acoustic medium. In
Abaqus/Standard you
can specify the in-phase (real) part of a load (default) and the out-of-phase
(imaginary) part of a load. Inward particle accelerations (force per unit mass
in transient dynamics) on the face of an acoustic element should be lumped to
concentrated loads representing inward volumetric accelerations on the nodes of
the face in the same way that pressure on a face is lumped to nodal forces on
stress/displacement elements.
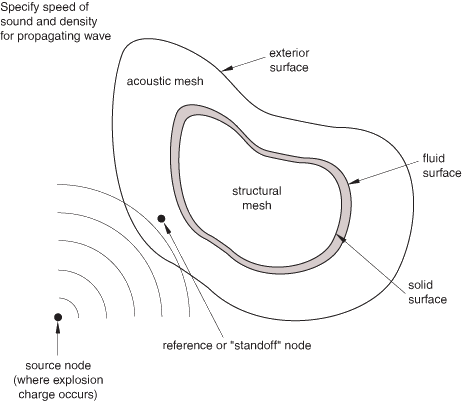
Incident Wave Loading due to External Sources
Abaqus
provides a type of distributed load for loads due to external wave sources.
Individual spherical monopole or individual or diffuse planar sources can be
defined, subjecting the fluid and solid region of interest to an incident field
of waves. Waves produced by an explosion or sound source propagate from the
source, impinging on and passing over the structure, producing a temporally and
spatially varying load on the structural surface. In the fluid the pressure
field is affected by reflections and emissions from the structure as well as by
the incident field from the source itself. The incident wave loads on acoustic
and/or solid meshes depend on the location of the source node, the properties
of the propagating fluid, and the reference time history or frequency
dependence specified at the reference (“standoff”) node as indicated in
Figure 1.
Incident wave loading model.
Several distinct modeling methods can be used in
Abaqus
with incident wave loading, requiring different approaches to applying the
incident wave loads. For problems involving solid and structural elements only
(for example, where the incident wave field is due to waves in air) the wave
loading is applied roughly like a distributed surface load. This might apply to
an analysis of blast loads in air on a vehicle or building (see
Example: Airblast Loading on a Structure,
shown in
Figure 6).
In
Abaqus/Explicit
the CONWEP model can be used for air blast
loading on solid and structural elements, without the need to model the fluid
medium.
Deformation of a sandwich plate under CONWEP blast loading
is an example of a blast loading problem.
Incident wave loads (with the exception of
CONWEP loading) can be applied to beam
structures as well; this is a common modeling method for ship whipping analysis
and for steel frame buildings subject to blast loads. Incident wave loads can
be applied to surfaces defined on two- or three-dimensional beam elements.
However, incident wave loads can be applied only to three-dimensional beams for
transient dynamic analysis where beam fluid inertia is defined. Incident wave
loads cannot be defined on frame elements, line spring elements,
three-dimensional open-section beam elements, or three-dimensional
Euler-Bernoulli beams.
In underwater explosion analyses (for example, a ship or submerged vehicle
subjected to an underwater explosion loading as depicted in
Figure 4
and
Figure 5)
the fluid is also discretized using a finite element model to capture the
effects of the fluid stiffness and inertia. For these problems involving both
solid and acoustic elements, two formulations of the acoustic pressure field
exist. First, the acoustic elements can be used to model the total pressure in
the medium, including the effects of the incident field and the overall
system's response. Alternatively, the acoustic elements can be used to model
only the response of the medium to the wave loads, not the wave pulse itself.
The former case will be referred to as the “total wave” formulation, the latter
as the “scattered wave” formulation.
Incident wave interactions are also used to model sound fields impinging on
structures or acoustic domains. The acoustic field scattered by a structure or
the sound transmitted through the structure may be of interest. Usually, sound
scattering and transmission problems are modeled using the scattered
formulation with steady-state dynamic procedures. Transient procedures can also
be used, in a manner analogous to underwater explosion analysis problems.
Scattered and Total Wave Formulations
The distinction between the total wave formulation and the scattered wave
formulation is relevant only when incident wave loads are applied. The total
wave formulation is more closely analogous to structural loading than the
scattered wave formulation: the boundary of the acoustic medium is specified as
a loaded surface, and a time-varying load is applied there, which generates a
response in the acoustic medium. This response is equal to the total acoustic
pressure in the medium. The scattered wave formulation exploits the fact that
when the acoustic medium is linear, the response in the medium can be
decomposed into a sum of the incident wave and the scattered field. The total
wave formulation must be used when the acoustic medium is nonlinear due to
possible fluid cavitation (see
Loading due to an incident dilatational wave field).
Table 1
describes the procedure types for which each formulation is supported.
Table 1. Supported procedures for scattered and total wave formulations.
Procedure
Scattered
Total Wave
Steady-state dynamics
Yes
No
Transient
Yes
Yes
Scattered Wave Formulation
When the mechanics of a fluid can be described as linear, the observed
total acoustic pressure can be decomposed into two components: the known
incident wave and the “scattered” wave that is produced by the interaction of
the incident wave with structures and/or fluid boundaries. When this
superposition is applicable, it is common practice to seek the “scattered” wave
field solution directly. When using the scattered wave formulation, the
pressures at the acoustic nodes are defined to be only the scattered part of
the total pressure. Both acoustic and solid surfaces at the acoustic-structural
interface should be loaded in this case.
When using incident wave loads in steady-state dynamic procedures, the
scattered wave formulation must be used.
Total Wave Formulation
The total wave formulation (see
Coupled acoustic-structural medium analysis)
is particularly applicable when the acoustic medium is capable of cavitation,
rendering the fluid mechanical behavior nonlinear. It should also be used if
the problem contains either a curved or a finite extent boundary where the
pressure history is prescribed. Only the outer acoustic surfaces should be
loaded with the incident wave in this case, and the incident wave source must
be located exterior to the fluid model. Any impedance or nonreflecting
condition that may exist on this outer acoustic boundary applies only on the
part of the acoustic solution that does not include the prescribed incident
wave field (that is, only the scattered field is subject to the nonreflecting
condition). Thus, the applied incident wave loading will travel into the
problem domain without being affected by the nonreflecting conditions on the
outer acoustic surface.
In the total wave formulation the acoustic pressure degree of freedom stands for the total
dynamic acoustic pressure, including contributions from incident and scattered waves
and, in Abaqus/Explicit, the dynamic effects of fluid cavitation. The pressure degree of freedom does not
include the acoustic static pressure, which can be specified as an initial condition
(see Defining Initial Acoustic Static Pressure). This acoustic static pressure is used only in determining the cavitation status of
the acoustic element nodes and does not apply any static loads to the acoustic or
structural mesh at their common wetted interface. It does not apply to analyses using
Abaqus/Standard.
Initialization of Acoustic Fields
For transient dynamics, when the total wave formulation is used with the
incident wave standoff point located inside the acoustic finite element domain,
the acoustic solution is initialized to the values of the incoming incident
wave. This initialization is performed automatically, for pressure-based
incident wave amplitude definitions only, at the beginning of the first
direct-integration dynamic step in an analysis; in restarted analyses, steps
are counted from the beginning of the initial analysis. This initialization not
only saves computational time but also applies the incident wave loading
without significant numerical dissipation or distortion. During the
initialization phase all incident wave loading definitions in the first dynamic
analysis step are considered, and all acoustic element nodes are initialized to
the incident wave field at time zero. Incident wave loads specified with
different source locations count as separate load definitions for the purpose
of initialization of the acoustic nodes. Any reflections of the incident wave
loads are also taken into account during the initialization phase.
Describing Incident Wave Loading
To use incident wave loading, you must define the following:
information that establishes the direction and other properties of the
incident wave,
the time history or frequency dependence of the source pulse at some
reference (“standoff”) point,
the fluid and/or solid surfaces to be loaded, and
any reflection plane outside the problem domain, such as a seabed in an
underwater explosion study, that would reflect the incident wave onto the
problem domain.
Two interfaces are available in
Abaqus
for applying incident wave loads: a preferred interface
and an alternative interface that has been available in previous releases.
The preferred interface is conceptually the same as the alternative interface
and uses essentially the same data. The preferred interface options include the
term “interaction” to distinguish them from the incident wave and incident wave
property options of the alternative interface. Unless otherwise specified, the
discussion in this section applies to both of the interfaces. The usages for
the preferred interface are included in the discussion; the usages for the
alternative interface are described in
Alternative Incident Wave Loading Interface
below. Refer to the example problems discussed at the end of this section to
see how the incident wave loading is specified using the preferred interface.
Prescribing Geometric Properties and the Speed of the Incident Wave
You must refer to a property definition for each prescribed incident wave.
Incident wave loads in
Abaqus
may be either planar, spherical, or diffuse. You select a planar incident wave
(default), spherical incident wave, or a diffuse field in the incident wave
property definition.
Planar incident waves maintain constant amplitude as they travel in space;
consequently, the speed and direction of travel are the critical parameters to
define. The speed is defined in the incident wave interaction property
definition, and the direction is determined by the locations of the source and
standoff points you define as part of the incident wave interaction.
For spherical incident wave definitions, the wave reduces in amplitude as
a function of space. By default, the amplitude of a spherical wave is inversely
proportional to the distance from the source; this behavior is called
“acoustic” propagation. For the preferred interface you can modify the default
propagation behavior to define spatial decay of the incident wave field. The
dimensionless constants ,
,
and
are used to define the spatial decay as a function of the distance
between the source point and the loaded point and the distance
between the source point and the standoff point:
In
Abaqus
incident wave interactions can be used to simulate diffuse incident fields.
Diffuse fields are characteristic of reverberant spaces or other situations in
which waves from many directions strike a surface. For example, reverberant
chambers are constructed intentionally in acoustic test facilities for sound
transmission loss measurements. The diffuse field model used in
Abaqus,
as shown in
Figure 2,
allows you to specify a seed number ;
deterministic incident plane waves travel along vectors distributed over a
hemisphere so that the incident power per solid angle approximates a diffuse
incident field.
Diffuse loading model.
The fluid and the solid surfaces where the incident loading acts are
specified in the incident wave loading definition. The incoming wave load is
further described by the locations of its source point and of a reference
(“standoff”) point where the wave amplitude is specified. For information on
how to specify these surfaces and the standoff point, see
Identifying the Fluid and the Solid Surfaces for Incident Wave Loading
and
The Standoff Point
below. For a planar wave the specified locations of the source and the standoff
points are used to define the direction of wave propagation.
The speed of the incident wave is prescribed by giving the properties for
the incident wave-bearing acoustic medium. These specified properties should be
consistent with the properties specified for the fluid discretized using
acoustic elements.
For the preferred interface you must define nodes corresponding to the
source and standoff points for the incident wave; the node numbers or set names
must be specified for each incident wave definition. The node set names, if
used, must contain only a single node. Neither the source node nor the standoff
node should be connected to any elements in the model.
Identifying the Fluid and the Solid Surfaces for Incident Wave Loading
In the scattered wave formulation the incident wave loading must be
specified on all fluid and solid surfaces that reflect the incident wave with
two exceptions:
those fluid surfaces that have the pressure values directly prescribed
using boundary conditions; and
those fluid surfaces that have symmetry conditions (the symmetry must
hold for both the loading and the geometry).
In problems with a fluid-solid interface both surfaces must be specified
in the incident wave loading definition for the scattered formulation. See
Example: Submarine Close to the Free Surface,
shown in
Figure 4.
When the total pressure-based formulation is specified, the incident wave
loading must be specified only on the fluid surfaces that border the infinite
region that is excluded from the model. Typically, these surfaces have a
nonreflecting radiation condition specified on them, and the implementation
ensures that the radiation condition is enforced only on the scattered response
of the modeled domain and not on the incident wave itself. See
Example: Submarine Close to the Free Surface
and
Example: Surface Ship,
shown in
Figure 4
and
Figure 5,
respectively.
In certain problems, such as blast loads in air, you may decide that the
blast wave loads on a structure need to be modeled, but the surrounding fluid
medium itself does not. In these problems the incident wave loading is
specified only on the solid surfaces since the fluid medium is not modeled. The
distinction between the scattered wave formulation and the total wave
formulation for handling the incident wave loading is not relevant in these
problems since the wave propagation in the fluid medium is of no interest.
The Standoff Point
In transient analyses the standoff point is a reference point used to
specify the pulse loading time history: it is the point at which the
user-defined pulse history is assumed to apply with no time delay, phase shift,
or spreading loss. In steady-state analyses using discrete planar or spherical
sources, the standoff point is the point at which the incident field has zero
phase.
In transient analyses the standoff point should be defined so that it is
closer to the source than any point on the surfaces in the model that would
reflect the incident wave. Doing so ensures that all the points on these
surfaces will be loaded with the specified time history of the source and that
the analysis begins before the wave overtakes any portion of these surfaces. To
save analysis time, the standoff point is typically on or near the solid
surface where the incoming incident wave would be first deflected (see
Example: Submarine Close to the Free Surface,
shown in
Figure 4).
However, the standoff point is a fixed point in the analysis: if the loaded
surfaces move before the incident wave loading begins, due to previous analysis
steps or geometric adjustments, the surfaces may envelop the specified standoff
point. Care should be taken to define a standoff point such that it remains
closer to the incident wave source point than any point on the loaded surfaces
at the onset of the loading.
When the total wave formulation is used and the incident wave loading is
specified in the first step of the analysis in terms of pressure history,
Abaqus
automatically initializes the pressure and the pressure rate at the acoustic
nodes to values based on the incident wave loading. This allows the acoustic
analysis to start with the incident waves partially propagated into the problem
domain at time zero and assumes that this propagation had taken place with
negligible effect of any volumetric dissipative sources such as the fluid drag.
When the incident wave loading is specified in terms of the pressure values,
the recommendations given above for selecting a standoff point are valid with
the total wave formulation as well. However, when the incident wave loading is
specified in terms of acceleration values, the automatic initialization is not
done and the standoff point should be located near the exterior fluid boundary
of the model such that the standoff point is closer to the source than any
point on the exterior boundary. See
Example: Submarine Close to the Free Surface
and
Example: Surface Ship,
shown in
Figure 4
and
Figure 5,
respectively.
In steady-state analyses the role of the standoff point is somewhat
different. When the incident wave interaction property is of planar or
spherical type, you define the real and imaginary parts of the magnitude at the
standoff point. Separately, the specified real and imaginary incident waves are
taken to have zero phase at the standoff point (combined, these two waves could
be equivalent to a single wave with nonzero phase at the standoff). Every
location on the loaded surface has a phase shift in the applied pressure or
acoustic traction, corresponding to the difference in propagation time between
the loaded point and the standoff. This means that an incident wave defined,
for example, with a pure real value at the standoff point generates both real
and imaginary tractions at all the other points on the loaded surface.
When the incident wave is of diffuse type, the role of the standoff and
source points is primarily to orient the loaded surface with respect to the
incoming reverberant field. The model used for diffuse incident wave loading
applies a set of deterministically defined plane waves, whose directions are
defined as vectors connecting the standoff point and an array of points on a
hemisphere. This hemisphere is centered at the standoff point, and its apex is
the source point. The array of points is set according to the specified seed,
,
and a deterministic algorithm that arranges
points on the hemisphere. The algorithm concentrates the points so that the
incident waves in the diffuse field model are concentrated at normal incidence,
with fewer waves at oblique angles. The specified amplitude value and reference
magnitude are divided equally among the
incident waves. The orientation of the hemisphere containing the incident waves
in the diffuse model is the same for all of the points on the loaded surface—it
does not vary with the local normal vector on the surface.
Defining the Amplitude of the Source Pulse
For transient analyses the time history to be specified by the user is
that observed at the standoff point: histories at a point on the loaded surface
are computed from the wave type and the location of that point relative to the
standoff point. The time history of the acoustic source pulse can be defined
either in terms of the fluid pressure values or the fluid particle acceleration
values. Pressure time histories can be used for any type of element, such as
acoustic, structural, or solid elements; acceleration time histories are
applicable only for acoustic elements. In either case a reference magnitude is
specified for any given incident-wave-loaded surface, and a reference to a
time-history data table defined by an amplitude curve is specified. The
reference magnitude varies with time according to the amplitude definition.
For steady-state dynamic analyses the amplitude definition specified as
part of the incident wave interaction definition is interpreted as the
frequency dependence of the wave at the standoff point.
Currently the source pulse description in terms of fluid particle
acceleration history is limited to planar incident waves acting on fluid
surfaces in transient analyses. Further, if an impedance condition is specified
on the same fluid surface along with incident wave loading, the source pulse is
restricted to the pressure history type even for planar incident waves. The
source pulse in terms of pressure history can be used without these
limitations; i.e., pressure-history-based incident wave loading can be used
with fluid or solid surfaces, with or without impedance, and for both planar
and spherical incident waves.
When the source pulse is specified using pressure values and is applied on
a fluid surface, the pressure gradient is computed and applied as a
pressure-conjugate load on these surfaces. Hence, it is desirable to define the
pulse amplitude to begin with a zero value, particularly when the cavitation in
the fluid is a concern. If the structural response is of primary concern and
the scattered formulation is being used, any initial jump in the pressure
amplitude can be addressed by applying additional concentrated loads on the
structural nodes that are tied to the acoustic mesh, corresponding to the
initial jump in the incident wave pressure amplitude. Clearly, the additional
load on any given structural node should be active from the instance the
incident wave first arrives at that structural node. However, the scattered
wave solution in the fluid still needs careful interpretation taking the
initial jump into account.
Defining Bubble Loading for Spherical Incident Wave Loading
An underwater explosion forms a highly compressed gas bubble that
interacts with the surrounding water, generating an outward-propagating shock
wave. The gas bubble floats upward as it generates these waves changing the
relative positions of the source and the loaded surfaces. The loading effects
due to bubble formation can be defined for spherical incident wave loading by
using a bubble definition in conjunction with the incident wave loading
definition.
The bubble dynamics can be described using a model internal to
Abaqus
or by using tabulated data.
Abaqus
has a built-in mechanical model of the bubble interacting with the surrounding
fluid, which is simulated numerically to generate a set of data prior to
running the finite element analysis. You can specify the explosive material
parameters, ending time, and other parameters that affect the computation of
the bubble amplitude curve used, as shown in
Table 2.
Table 2. Parameters that define the bubble behavior.
Name
Dimensions
Description
Default
FL−2(LM−1/3)1+A
Charge constant
None
T/(MLB)
Charge constant
None
Dimensionless
Similitude spatial exponent
None
Dimensionless
Similitude temporal exponent
None
F/L2
Charge constant
None
Dimensionless
Ratio of specific heats for explosion gas
None
M/L3
Charge material density
None
M
Mass of charge
None
L
Initial charge depth
None
Dimensionless
X-direction cosine of the
free surface normal
None
Dimensionless
Y-direction cosine of the
free surface normal
None
Dimensionless
Z-direction cosine of the
free surface normal
None
L/T2
Acceleration due to gravity
None
F/L2
Atmospheric pressure at free surface
None
Dimensionless
Wave effect parameter
1.0
Dimensionless
Bubble drag coefficient
0.0
Dimensionless
Bubble drag exponent
2.0
T
Maximum allowable time in bubble simulation
None
Dimensionless
Maximum allowable number of steps in bubble
simulation
1500
Dimensionless
Relative error tolerance parameter for bubble
simulation
1 × 10−11
Dimensionless
Absolute error tolerance parameter for bubble
simulation
1 × 10−11
Dimensionless
Error control exponent for bubble simulation
0.2
M/L3
Fluid mass density
None
L/T
Fluid speed of sound
None
All of the parameters specified affect only the bubble amplitude; other
physical parameters in the problem are independent. You can suppress the
effects of wave loss in the bubble dynamics and introduce empirical flow drag,
if desired. Detailed information about the bubble mechanical model is given in
Loading due to an incident dilatational wave field.
In an underwater explosion event a bubble migrates upward toward, and
possibly reaches, the free water surface. If the bubble migration reaches the
free water surface during the specified analysis time,
Abaqus
applies loads of zero magnitude after this point.
Model data about the bubble simulation are written to the data
(.dat) file. During an
Abaqus/Standard analysis
history data are written each increment to the output database
(.odb) file. The history data include the radius of the
bubble and the bubble depth below the free water surface. For reference, the
pressure and acoustic load quantities at the standoff point are also written to
the data file; these load terms include the direct plane-wave term and the
spherical spreading (“afterflow”) effect (see
Loading due to an incident dilatational wave field).
For the preferred interface the loading effects due to bubble formation
can be defined for spherical incident wave loading using the
UNDEX charge property definition. Because the
bubble simulation uses spherical symmetry, the incident wave interaction
property must define a spherical wave.
Modeling Incident Wave Loading on a Moving Structure
To model the effect of relative motion between a structure (such as a
ship) and the wave source during the analysis using the preferred interface,
the source node may be assigned a velocity. It is assumed that the entire
fluid-solid model is moving at a velocity with respect to the source node
during the loading and that the speed of the model's motion is low compared to
the speed of propagation of the incident wave. That is, the effect of the speed
of the source is neglected in the computation of the loads, but the change in
position of the source is included. This is equivalent to assuming that the
relative motion between the source and the model is at a low Mach number.
Relative motion can be specified only for transient analyses.
In addition to prescribing boundary conditions at the source node, a small
mass element must be defined at the source node.
Specifying the Reflection Effects
The waves emanating from the source may reflect off plane surfaces, such
as seabeds or sea surfaces, before reaching the specified standoff point. Thus,
the incident wave loading consists of the waves arriving from a direct path
from the source, as well as those arriving from reflections off the planes. In
Abaqus
an arbitrary number of these planes can be defined, each with its own location,
orientation, and reflection coefficient.
If no reflection coefficient is specified, the plane is assumed to be
nonreflective; a zero reflected pressure is applied. If a reflection
coefficient is specified, the magnitude of the reflected waves are modified by
the reflection coefficient
according to the formula:
Only real values for
are used.
The reflection planes are allowed only for incident waves that are defined
in terms of fluid pressure values. Only one reflection off each plane is
considered. If the effect of many successive reflections is important, these
surfaces should be part of the finite element model. Reflection planes should
not be used at a boundary of the finite element model if the total wave
formulation is used, since in that case the incident wave will be reflected
automatically by that boundary.
Boundary with Prescribed Pressure
The acoustic pressure degree of freedom at nodes of acoustic elements can
be prescribed using a boundary condition. However, since you can use the nodal
acoustic pressure in an
Abaqus
analysis to refer to the total pressure at that point or to only the scattered
component, care must be exercised in some circumstances.
When the total wave formulation is used, a boundary condition alone is
sufficient to specify a prescribed total dynamic pressure on a boundary.
In an analysis without incident wave loading, the nodal degree of freedom
is generally equal to the total acoustic pressure at that point. Therefore, its
value can be prescribed using a boundary condition in a manner consistent with
other boundary conditions in
Abaqus.
For example, you may set the acoustic pressure at all of the nodes at a duct
inlet to a prescribed amplitude to analyze the propagation of waves along the
duct. The free surface of a body of water can be modeled by setting the
acoustic pressure to zero at the surface.
When incident wave loading is used, the scattered wave formulation defines
the nodal acoustic degree of freedom to be equal to the scattered pressure.
Consequently, a boundary condition definition for this degree of freedom
affects the scattered pressure only. The total acoustic pressure at a node is
not directly accessible in this formulation. Specification of the total
pressure in a scattered formulation analysis is nevertheless required in some
instances (for example, when modeling a free surface of a body of water). In
this case, one of the following methods should be used.
If the fluid surface with prescribed total pressure is planar, unbroken,
and of infinite extent, an incident wave reflection plane and a boundary
condition can be used together to model the fact that the total pressure is
zero on the free surface. A “soft” incident wave reflection plane coincident
with the free surface will make sure that the structure is subjected to the
incident wave load reflected off the free surface. A boundary condition setting
the acoustic pressure in the surface equal to zero will make sure that any
scattered waves emitted by the structure are reflected properly. The scattered
wave solution in the fluid must be interpreted taking into consideration the
fact that the incident field now includes a reflection of the source as well.
If the fluid surface with prescribed total pressure is planar but broken by an
object, such as a floating ship, this modeling technique may still be applied.
However, the reflected loads due to the incident wave are computed as if the
reflection plane passes through the hull of the ship; this approximation
neglects some diffraction effects and may or may not be applicable in all
situations of interest.
Alternatively, the free surface condition of the fluid can be eliminated
by modeling the top layer of the fluid using structural elements, such as
membrane elements, instead of acoustic elements. The “structural fluid” surface
and the “acoustic fluid” surface are then coupled using either a surface-based
mesh tie constraint (Mesh Tie Constraints)
or, in
Abaqus/Standard,
acoustic-structural interface elements; and the incident wave loading must be
applied on both the “structural fluid” and the “acoustic fluid” surfaces. The
material properties of the “structural fluid” elements should be similar to
those of the adjacent acoustic fluid. In
Abaqus/Explicit
the thickness of the “structural fluid” elements must be such that the masses
at nodes on either side of the coupling constraint are nearly equal. This
modeling technique allows the geometry of the surface on which total pressure
is to be prescribed to depart from an unbroken, infinite plane. As a secondary
benefit of this technique, you can obtain the velocity profile on the free
surface since the displacement degrees of freedom are now activated at the
“structural fluid” nodes. If a nonzero pressure boundary condition is desired,
it can be applied as a distributed loading on the other side of the “structural
fluid” elements.
Defining Air Blast Loading for Incident Shock Waves Using the CONWEP Model in Abaqus/Explicit
An explosion in air forms a highly compressed gas mass that interacts with
the surrounding air, generating an outward-propagating shock wave. The loading
effects due to an explosion in air can be defined, for spherical incident waves
(air blast) or hemispherical incident waves (surface blast), by empirical data
provided by the CONWEP model in conjunction
with the incident wave loading definition.
Unlike an acoustic wave, a blast wave corresponds to a shock wave with
discontinuities in pressure, density, etc. across the wave front.
Figure 3
shows a typical pressure history of a blast wave.
Pressure history of a blast wave.
The CONWEP model uses a scaled distance
based on the distance of the loading surface from the source of the explosion
and the amount of explosive detonated. For a given scaled distance, the model
provides the following empirical data: the maximum overpressure (above
atmospheric), the arrival time, the positive phase duration, and the
exponential decay coefficient for both the incident pressure and the reflected
pressure. Using these parameters, the entire time history of both the incident
pressure and reflected pressure as shown in
Figure 3
can be constructed. Use of a standoff point is not required.
The total pressure, ,
on a surface due to the blast wave is a function of the incident pressure,
,
the reflected pressure, ,
and the angle of incidence, ,
which is defined as the angle between the normal of the loading surface and the
vector that points from the surface to the explosion source. The total pressure
is defined as
The air blast loading due to the total pressure can be scaled using a
magnitude scale factor.
A detonation time can be specified if the explosion does not occur at the
start of the analysis. The detonation time needs to be given in total time; see
Conventions
for a description of the time convention. The arrival time at a location is
defined as the elapsed time for the wave to arrive at that location after
detonation.
The CONWEP empirical data are given in a
specific set of units, which must be converted to the units used in the
analysis. You will need to specify multiplying factors for conversion of these
units to SI units. For the specification of
the mass of the explosive in TNT equivalence,
you can choose any convenient mass unit, which can be different from the mass
unit used in the analysis. For computation of the pressure loading, you will
need to specify multiplying factors for conversion of length, time, and
pressure units used in the analysis to SI
units. Some typical conversion multiplier values are given in
Table 3.
Table 3. Multipliers used in conjunction with the
CONWEP model for conversion to
SI units.
Quantity
Unit
SI Unit
Multiplier for conversion to
SI
Mass
ton
kg
1000
Mass
lb
kg
0.45359
Length
mm
m
0.001
Length
ft
m
0.3048
Time
msec
sec
0.001
Pressure
MPa
Pa
106
Pressure
psi
Pa
6894.8
Pressure
psf
Pa
47.88
For any given amount of explosive, the
CONWEP empirical data are valid only within a
range of distances from the source. The minimum distance at which the data are
valid corresponds to the charge radius. Thus, the analysis terminates if the
distance of any part of the loading surface from the source is less than the
charge radius. For distances that are larger than the maximum valid range,
linear extrapolation is used up to an extended maximum range where the
reflected pressure decreases to zero. No loading is applied beyond the extended
maximum range.
The CONWEP empirical data do not account
for shadowing by intervening objects or for any effects due to confinement. In
the definition of incident wave interaction using the
CONWEP model, you cannot use incident wave
reflection.
Only the incident wave loads that are specified in a particular step are
applied in that step; previous definitions are removed automatically.
Consequently, incident wave loads that are active during two subsequent steps
should be specified in each step. This is akin to the behavior that can be
specified for other types of loads by releasing any load of that type in a step
(see
About Loads).
Alternative Incident Wave Loading Interface
In general, the concepts of the alternative incident wave loading interface
are the same as the preferred interface; however, the syntax for specifying the
incident wave loading is different.
For conceptual information, see
Incident Wave Loading due to External Sources.
Prescribing the Geometric Properties and the Speed of the Incident Wave (Alternative Interface)
Defining the Time History of the Source Pulse (Alternative Interface)
Conceptually, the alternative interface is the same as the preferred
interface; however, the usages are different. For conceptual information, see
Defining the Amplitude of the Source Pulse.
Defining Bubble Loading for Spherical Incident Wave Loading (Alternative Interface)
To define the bubble dynamics using a model internal to
Abaqus,
you can specify a bubble amplitude. Use of the bubble loading amplitude is
generally similar to the use of any other amplitude in
Abaqus.
Specifying the Reflection Effects (Alternative Interface)
Conceptually, the alternative interface is the same as the preferred
interface; however, the usages are different. For conceptual information, see
Specifying the Reflection Effects.
Modeling Incident Wave Loading on a Moving Structure (Alternative Interface)
To model the effect of rigid motion of a structure such as a ship during
the incident wave loading history, the standoff point can have a specified
velocity. It is assumed that the entire fluid-solid model is moving at this
velocity with respect to the source point during the loading and that the speed
of the model's motion is low compared to the speed of propagation of the
incident wave.
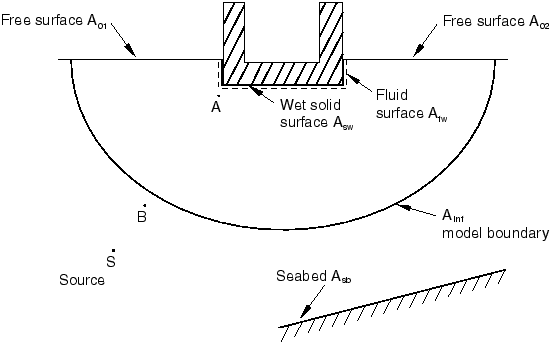
Example: Submarine Close to the Free Surface
The problem shown in
Figure 4
has the following features: a free surface ,
seabed
as a reflection plane, a wet solid surface ,
the fluid surface
that is tied to the solid surface ,
and the boundary
of the finite modeled domain separating the infinite acoustic medium. The
source S of the underwater explosion loading is also
shown.
Incident wave loading on a submarine lying near a free
surface.
Scattered Wave Solution
Here the scattered wave response in the acoustic medium is of interest
along with that of the structure to the incident wave loading. Cavitation in
the fluid is not considered in a scattered wave formulation. Similarly, the
initial hydrostatic pressure in the fluid is not modeled.
The zero dynamic acoustic pressure boundary condition on the free surface
requires both a “soft” reflection plane coinciding with the free surface
and a zero scattered pressure boundary condition at the nodes on this free
surface. The incident wave loading is applied on the fluid surface,
,
and on the wet solid surface, .
The incident wave loading can be only of pressure amplitude type since the
loading includes a solid surface.
A good location for the standoff node is marked as A
in
Figure 4.
This node is in the fluid, close to the structure, and closer to incident wave
source S than any portion of the seabed or the free
surface. The standoff node's offset from the loaded surfaces is exaggerated for
emphasis in the figure.
The radiation condition is specified on the acoustic surface
such that the scattered wave impinging on this boundary with the infinite
medium does not reflect back into the computational domain. The seabed is
modeled with an incident wave reflection plane on surface
.
The reflection loss at this seabed surface is modeled using an impedance
property.
If the response of the structure in the nonlinear regime is of interest,
the initial stress state in the structure should be established using
Abaqus/Standard
in a static analysis. The stress state in the structure is then imported into
Abaqus/Explicit,
and the loading on the solid surfaces causing the initial stress state is
respecified in the acoustic analysis.
The following template schematically shows some of the
Abaqus
input file options that are used to solve this problem using the scattered wave
formulation:
HEADING
…
SURFACE, NAME=
Data lines to define the acoustic surface that is wetting the solidSURFACE, NAME=
Data lines to define the solid surface that is wetted by the fluidSURFACE, NAME=
Data lines to define the acoustic surface separating the modeled region from the infinite mediumINCIDENT WAVE INTERACTION PROPERTY, NAME=IWPROP
AMPLITUDE, DEFINITION=TABULAR, NAME=PRESSUREVTIME
TIE, NAME=COUPLING
, STEP
** For an Abaqus/Standard analysis:
DYNAMIC
** For an Abaqus/Explicit analysis:
DYNAMIC, EXPLICIT
** Load the acoustic surface
INCIDENT WAVE INTERACTION, PRESSURE AMPLITUDE=PRESSUREVTIME,
PROPERTY=IWPROP
, source node, standoff node, reference magnitudeINCIDENT WAVE REFLECTIONData lines for the reflection plane over the seabed , seabed_QINCIDENT WAVE REFLECTIONData lines for a "soft" reflection plane over the free surface .
** Load the solid surface
INCIDENT WAVE INTERACTION, PRESSURE AMPLITUDE=PRESSUREVTIME,
PROPERTY=IWPROP
, source node, standoff node, reference magnitudeINCIDENT WAVE REFLECTIONData lines for the reflection plane over the seabed , seabed_QINCIDENT WAVE REFLECTIONData lines for a "soft" reflection plane over the free surface .BOUNDARY
** zero pressure boundary condition on the free surface
Set of nodes on the free surface , 8, 8, 0.0SIMPEDANCE, END STEP
Total Wave Solution
Here the total wave response in the acoustic medium is of interest along
with that of the structure to the incident wave loading. Cavitation in the
fluid may be included. Similarly, a linearly varying initial hydrostatic
pressure in the fluid can be specified.
The zero dynamic acoustic pressure boundary condition on the free surfaces
requires only a zero pressure boundary condition at the nodes on this free
surface. A reflection plane should not be included along the free surface. The
incident wave loading is applied only on the fluid surface,
,
that separates the modeled region from the surrounding infinite acoustic
medium. No incident wave should be applied directly on the structure surfaces.
If the incident wave is considered planar, an acceleration-type amplitude can
be used with the incident wave loading. Otherwise, a pressure-type amplitude
must be used with the incident wave loading.
An ideal location for the standoff node depends on the type of amplitude
used for the time history of the incident wave loading. The location
A shown in
Figure 4
can be used if the incident wave loading time history is of pressure amplitude
type. Otherwise, the location B that is just on the
boundary
and closer to the source S than any part of either the
seabed or the free surface can be used.
The nonreflecting impedance condition is specified on the acoustic
surface, ,
such that the scattered part of the total wave impinging on this boundary with
the infinite medium does not reflect back into the computational domain. The
seabed is modeled with an incident wave reflection plane on the surface
.
If the response of the structure in the nonlinear regime is of interest,
the initial stress state in the structure should be established using
Abaqus/Standard
in a static analysis. The stress state in the structure is then imported into
Abaqus/Explicit,
and the loading on the solid surfaces causing the initial stress state is
respecified in the acoustic analysis.
The following template schematically shows some of the input file options
that are used to solve this problem using the total wave formulation:
HEADING
…
ACOUSTIC WAVE FORMULATION, TYPE=TOTAL WAVEMATERIAL, NAME=CAVITATING_FLUID
ACOUSTIC MEDIUM, BULK MODULUSData lines to define the fluid bulk modulusACOUSTIC MEDIUM, CAVITATION LIMITData lines to define the fluid cavitation limit
…
SURFACE, NAME=
Data lines to define the acoustic surface that is wetting the solidSURFACE, NAME=
Data lines to define the solid surface that is wetted by the fluidSURFACE, NAME=
Data lines to define the acoustic surface separating the modeled region from the infinite mediumINCIDENT WAVE INTERACTION PROPERTY, NAME=IWPROP
AMPLITUDE, DEFINITION=TABULAR, NAME=PRESSUREVTIME
Data lines to define the pressure-time history at the standoff pointTIE, NAME=COUPLING
, INITIAL CONDITIONS, TYPE=ACOUSTIC STATIC PRESSUREData lines to define the initial linear hydrostatic pressure in the fluidSTEPDYNAMIC, EXPLICIT
** Load the acoustic surface
INCIDENT WAVE INTERACTION, PRESSURE AMPLITUDE=PRESSUREVTIME,
PROPERTY=IWPROP
, source node, standoff node, reference magnitudeINCIDENT WAVE REFLECTIONData lines for the reflection plane over the seabed , seabed_QBOUNDARY
** zero pressure boundary condition on the free surface
Set of nodes on the free surface , 8, 8, 0.0SIMPEDANCE, END STEP
Example: Submarine in Deep Water
This problem is similar to the previous example of a submarine close to the
free surface except for the following differences. There is no free surface in
this problem; and the fluid surface, ,
and the fluid medium completely enclose the structure. If the structure is
sufficiently deep in the water, hydrostatic pressure may be considered uniform
instead of varying linearly with depth. Under this assumption, the initial
stress state in the structure can be established with a uniform pressure
loading all around it, if desired. In addition, if the structure is
sufficiently deep in the water, the hydrostatic pressure may be significant
compared to the incident wave loading; hence, the cavitation in the fluid may
not be of concern.
Example: Surface Ship
Here the effect of underwater explosion loading on a surface ship is of
interest (see
Figure 5).
Modeling of incident wave loading on a surface ship.
This problem is similar to the previous example of a submarine close to the
free surface except for the following differences. The free surface of fluid is
not continuous, and a part of the structure is exposed to the atmosphere. A
soft reflection plane coinciding with the free surface is not used in this
problem as in the submarine problems under the scattered wave formulation. To
be able to use the scattered wave formulation in this case, the modeling
technique is used in which the free surface is replaced with “structural fluid”
elements. A layer of fluid at the free surface is modeled using non-acoustic
elements such as membrane elements. These elements are coupled to the
underlying acoustic fluid using a mesh tie constraint. The non-acoustic
elements have properties similar to the fluid itself since these elements are
replacing the fluid medium near the free surface and should have a thickness
similar to the height of the adjacent acoustic elements. Incident wave loading
with the scattered wave formulation must now be applied on these newly created
surfaces as well. This technique has the added advantage of providing the
deformed shape of the free surface under the loading.
The following template shows some of the
Abaqus
input file options used for this case:
HEADING
…
SURFACE, NAME=A01_structuralfluid
Data lines to define the "structural fluid" surfaceSURFACE, NAME=A01_acousticfluid
Data lines to define the adjacent acoustic fluid surfaceSURFACE, NAME=A02_structuralfluid
Data lines to define the "structural fluid" surfaceSURFACE, NAME=A02_acousticfluid
Data lines to define the adjacent acoustic fluid surfaceSURFACE, NAME=Asw_solid
Data lines to define the actual solid surface that is wetted by the fluidSURFACE, NAME=Asw_fluid
Data lines to define the actual acoustic surface that is adjacent to the structureSURFACE, NAME=
Data lines to define the acoustic surface separating the modeled region from the infinite mediumINCIDENT WAVE INTERACTION PROPERTY, NAME=IWPROP
AMPLITUDE, DEFINITION=TABULAR, NAME=PRESSUREVTIME
Data lines to define the pressure-time history at the standoff pointTIE, NAME=COUPLING
Asw_fluid, Asw_solid
A01_acousticfluid, A01_structuralfluid
A02_acousticfluid, A02_structuralfluidSTEP
** For an Abaqus/Standard analysis:
DYNAMIC
** For an Abaqus/Explicit analysis:
DYNAMIC, EXPLICIT
** Load the acoustic surfaces
INCIDENT WAVE INTERACTION, PRESSURE AMPLITUDE=PRESSUREVTIME,
PROPERTY=IWPROP
A01_acousticfluid, source point, standoff point, reference magnitudeINCIDENT WAVE REFLECTIONData lines for the reflection plane over the seabed , seabed_QINCIDENT WAVE INTERACTION, PRESSURE AMPLITUDE=PRESSUREVTIME,
PROPERTY=IWPROP
A02_acousticfluid, source point, standoff point, reference magnitudeINCIDENT WAVE REFLECTIONData lines for the reflection plane over the seabed , seabed_QINCIDENT WAVE INTERACTION, PRESSURE AMPLITUDE=PRESSUREVTIME,
PROPERTY=IWPROP
Asw_fluid, source point, standoff point, reference magnitudeINCIDENT WAVE REFLECTIONData lines for the reflection plane over the seabed , seabed_Q
** Load the solid surfaces
INCIDENT WAVE INTERACTION, PRESSURE AMPLITUDE=PRESSUREVTIME,
PROPERTY=IWPROP
A01_structuralfluid, source point, standoff point, reference magnitudeINCIDENT WAVE REFLECTIONData lines for the reflection plane over the seabed , seabed_QINCIDENT WAVE INTERACTION, PRESSURE AMPLITUDE=PRESSUREVTIME,
PROPERTY=IWPROP
A02_structuralfluid, source point, standoff point, reference magnitudeINCIDENT WAVE REFLECTIONData lines for the reflection plane over the seabed , seabed_QINCIDENT WAVE INTERACTION, PRESSURE AMPLITUDE=PRESSUREVTIME,
PROPERTY=IWPROP
Asw_solid, source point, standoff point, reference magnitude INCIDENT WAVE REFLECTIONData lines for the reflection plane over the seabed , seabed_QSIMPEDANCE, END STEP
Compared to the total wave formulation analysis of a submarine close to the
free surface, the following differences are noteworthy. As shown in
Figure 5,
the free surface with zero dynamic pressure boundary condition is now split
into two parts:
and .
The fluid surface wetting the ship ()
and the wetted ship surface (),
which are tied together, do not encircle the whole structure. Besides these
differences, the modeling considerations for the surface ship problem are
similar to the total wave analysis of the submarine near the free surface.
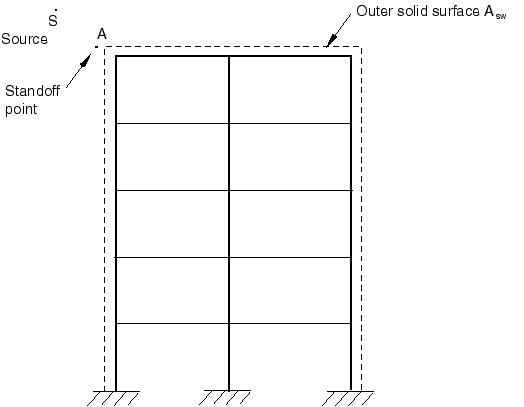
Example: Airblast Loading on a Structure
Here the effect of airblast (explosion in the air) loading on a structure is
of interest (see
Figure 6).
Modeling of airblast loading on a structure.
Since the stiffness and inertia of the air medium are negligible, the
acoustic medium is not modeled. Rather the incident wave loading is applied
directly on the structure itself. The solid surface
where the incident wave loading is applied is shown in
Figure 6.
Since the acoustic medium is not modeled, the total wave and the scattered wave
formulations are identical.
Example: Fluid Cavitation without Incident Wave Loading
You may be interested in modeling acoustic problems in
Abaqus/Explicit
where the loading is applied through either prescribed pressure boundaries or
specified pressure-conjugate concentrated loads. Choice of the scattered or the
total wave formulation is not relevant in these problems even when the acoustic
medium is capable of cavitation.