allows arbitrary time (or frequency) variations of load, displacement,
and other prescribed variables to be given throughout a step (using step time)
or throughout the analysis (using total time);
can be defined as a mathematical function (such as a sinusoidal
variation), as a series of values at points in time (such as a digitized
acceleration-time record from an earthquake), as a user-customized definition
via user subroutines, or, in
Abaqus/Standard,
as values calculated based on a solution-dependent variable (such as the
maximum creep strain rate in a superplastic forming problem); and
can be referred to by name by any number of boundary conditions,
loads, and predefined fields.
By default, the values of loads, boundary conditions, and predefined fields
either change linearly with time throughout the step (ramp function) or they
are applied immediately and remain constant throughout the step (step
function)—see
Defining an Analysis.
Many problems require a more elaborate definition, however. For example,
different amplitude curves can be used to specify time variations for different
loadings. One common example is the combination of thermal and mechanical load
transients: usually the temperatures and mechanical loads have different time
variations during the step. Different amplitude curves can be used to specify
each of these time variations.
Other examples include dynamic analysis under earthquake loading, where an
amplitude curve can be used to specify the variation of acceleration with time,
and underwater shock analysis, where an amplitude curve is used to specify the
incident pressure profile.
Amplitudes are defined as model data (that is, they are not step dependent). Each amplitude curve
must be named; this name is then referred to from the load, boundary condition, or
predefined field definition (see About Prescribed Conditions).
Amplitudes defined as functions of time can be given in terms of
step time (default) or in terms of
total time. These time measures are defined in
Conventions.
Continuation of an Amplitude Reference in Subsequent Steps
If a boundary condition, load, or predefined field refers to an amplitude
curve and the prescribed condition is not redefined in subsequent steps, the
following rules apply:
If the associated amplitude is given in terms of total time, the prescribed condition continues
to follow the amplitude definition.
If the amplitude is given in terms of step time, the following rules apply:
Boundary conditions and predefined fields remain constant at the magnitude
associated with the end of the previous step.
Loads remain constant at the magnitude associated with the end of the previous
step unless the amplitude is specified in user subroutine UAMP (Abaqus/Standard) or VUAMP (Abaqus/Explicit), in which case the loads are removed immediately.
If no associated amplitude is given, the prescribed condition remains constant at the magnitude
associated with the end of the previous step.
Specifying Relative or Absolute Data
You can choose between specifying relative or absolute magnitudes for an
amplitude curve.
Relative Data
By default, you give the amplitude magnitude as a multiple (fraction) of the
reference magnitude given in the prescribed condition definition. This method
is especially useful when the same variation applies to different load types.
Absolute Data
Alternatively, you can give absolute magnitudes directly. When this method is used, the values
given in the prescribed condition definitions are ignored.
In general, you should not use absolute amplitude values to define temperatures or predefined
field variables for nodes attached to beam or shell elements as values at the reference
surface together with the gradient or gradients across the section (default cross-section
definition; see Using a Beam Section Integrated during the Analysis to Define the Section Behavior and Using a Shell Section Integrated during the Analysis to Define the Section Behavior). Because the
values given in temperature fields and predefined fields are ignored, the absolute
amplitude value is used to define both the temperature and the gradient and field and
gradient, respectively.
Defining the Amplitude Data
The variation of an amplitude with time can be specified in several ways.
The variation of an amplitude with frequency can be given only in tabular or
equally spaced form.
Defining Tabular Data
Choose the tabular definition method (default) to define the amplitude curve
as a table of values at convenient points on the time scale.
Abaqus
interpolates linearly between these values, as needed. By default in
Abaqus/Standard,
if the time derivatives of the function must be computed, some smoothing is
applied at the time points where the time derivatives are discontinuous. In
contrast, in
Abaqus/Explicit
no default smoothing is applied (other than the inherent smoothing associated
with a finite time increment). You can modify the default smoothing values
(smoothing is discussed in more detail below, under the heading “Using an
amplitude definition with boundary conditions”); alternatively, a smooth step
amplitude curve can be defined (see “Defining smooth step data” below).
If the amplitude varies rapidly—as with the ground acceleration in an earthquake, for example—you
must ensure that the time increment used in the analysis is small enough to pick up the
amplitude variation accurately since Abaqus samples the amplitude definition only at the times corresponding to the increments
being used.
If the analysis time in a step is less than the earliest time for which data
exist in the table,
Abaqus
applies the earliest value in the table for all step times less than the
earliest tabulated time. Similarly, if the analysis continues for step times
past the last time for which data are defined in the table, the last value in
the table is applied for all subsequent time.
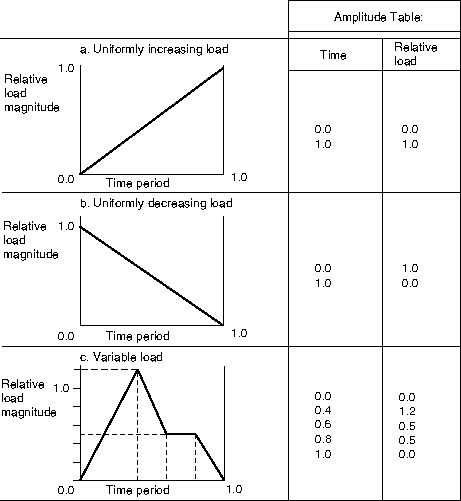
Several examples of tabular input are shown in
Figure 1.
Tabular amplitude definition examples.
Defining Equally Spaced Data
Choose the equally spaced definition method to give a list of amplitude values at fixed time
intervals beginning at a specified value of time. Abaqus interpolates linearly between each time interval. You must specify the fixed time (or
frequency) interval at which the amplitude data is given, . You can also specify the time (or lowest frequency) at which the first
amplitude is given, ; the default is =0.0.
If the analysis time in a step is less than the earliest time for which data
exist in the table,
Abaqus
applies the earliest value in the table for all step times less than the
earliest tabulated time. Similarly, if the analysis continues for step times
past the last time for which data are defined in the table, the last value in
the table is applied for all subsequent time.
Defining Periodic Data
Choose the periodic definition method to define the amplitude,
a, as a Fourier series:
where ,
N, ,
,
,
and ,
,
are user-defined constants. An example of this form of input is shown in
Figure 2.
Periodic amplitude definition example.
Defining Modulated Data
Choose the modulated definition method to define the amplitude,
a, as
where ,
A, ,
,
and
are user-defined constants. An example of this form of input is shown in
Figure 3.
Modulated amplitude definition example.
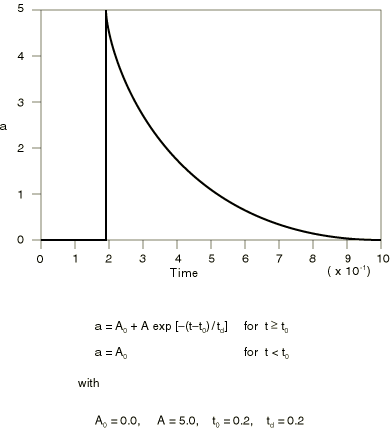
Defining Exponential Decay
Choose the exponential decay definition method to define the amplitude,
a, as
where ,
A, ,
and
are user-defined constants. An example of this form of input is shown in
Figure 4.
Exponential decay amplitude definition example.
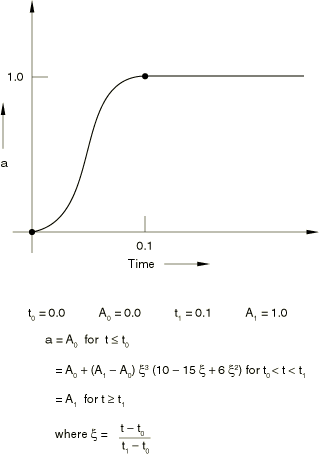
Defining Smooth Step Data
Abaqus/Standard
and
Abaqus/Explicit
can calculate amplitudes based on smooth step data. Choose the smooth step
definition method to define the amplitude, a, between two
consecutive data points
and
as
where .
The above function is such that
at ,
at ,
and the first and second derivatives of a are zero at
and .
This definition is intended to ramp up or down smoothly from one amplitude
value to another.
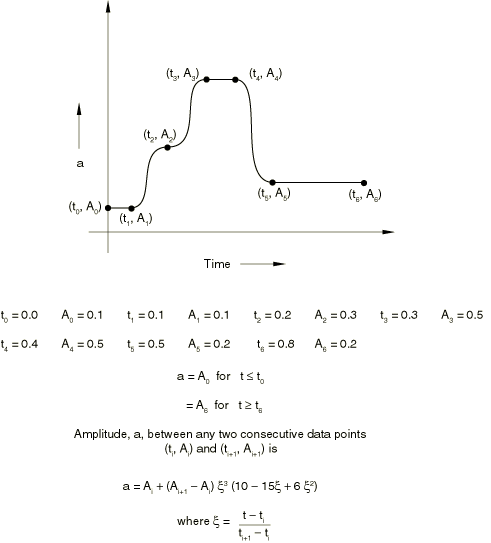
The amplitude, a, is defined such that
where
and
are the first and last data points, respectively.
Examples of this form of input are shown in Figure 5 and Figure 6. This definition cannot be used to interpolate smoothly between a set of data points;
that is, this definition cannot be used to do curve fitting.
Smooth step amplitude definition example with two data points. Smooth step amplitude definition example with multiple data
points.
Defining a Solution-Dependent Amplitude for Superplastic Forming Analysis
Abaqus/Standard
can calculate amplitude values based on a solution-dependent variable. Choose
the solution-dependent definition method to create a solution-dependent
amplitude curve. The data consist of an initial value, a minimum value, and a
maximum value. The amplitude starts with the initial value and is then modified
based on the progress of the solution, subject to the minimum and maximum
values. The maximum value is typically the controlling mechanism used to end
the analysis. This method is used with creep strain rate control for
superplastic forming analysis (see
Rate-Dependent Plasticity: Creep and Swelling).
Defining the Bubble Load Amplitude for an Underwater Explosion
The preferred interface for incident wave loading due to an underwater
explosion specifies bubble dynamics using the
UNDEX charge property definition (see
Defining Bubble Loading for Spherical Incident Wave Loading).
The alternative interface for incident wave loading uses the bubble definition
described in this section to define bubble load amplitude curves.
An example of the bubble amplitude definition with the following input data
is shown in
Figure 7.
Bubble amplitude definition example: (a) radius of bubble and (b)
depth of bubble center under fluid surface.
Defining an Amplitude via a User Subroutine
Choose the user definition method to define the amplitude curve via coding
in user subroutine
UAMP (Abaqus/Standard)
or
VUAMP (Abaqus/Explicit).
You define the value of the amplitude function in time and, optionally, the
values of the derivatives and integrals for the function sought to be
implemented as outlined in
UAMP
and
VUAMP.
You can use an arbitrary number of properties to calculate the amplitude,
and you can use an arbitrary number of state variables that can be updated
independently for each amplitude definition.
In
Abaqus/Standard
user-defined amplitudes are not supported for complex eigenvalue extraction,
linear dynamic procedures, and steady-state dynamic analysis with the response
computed directly in terms of the physical degrees of freedom.
Moreover, solution-dependent sensors can be used to define the
user-customized amplitude. The sensors can be identified via their name, and
two utilities allow for the extraction of the current sensor value inside the
user subroutine (see
Obtaining Sensor Information).
Simple control/logical models can be implemented using this feature as
illustrated in
Crank mechanism.
Defining an Actuator Amplitude via Co-Simulation
The current value of an actuator amplitude can be imported at any given time
from a co-simulation with a logical modeling program (see
About Co-Simulation).
The name specified on the actuator amplitude definition is used as the actuator
name for co-simulation purposes. Therefore, at a given time each actuator is
associated with one real number—the current value of the amplitude. As with any
amplitude definition, the user-specified name can be used in conjunction with
any
Abaqus
feature that can reference an amplitude.
Using an Amplitude Definition with Boundary Conditions
When an amplitude curve is used to prescribe a variable of the model as a
boundary condition (by referring to the amplitude from the boundary condition
definition), the first and second time derivatives of the variable may also be
needed. For example, the time history of a displacement can be defined for a
direct integration dynamic analysis step by an amplitude variation; in this
case
Abaqus
must compute the corresponding velocity and acceleration.
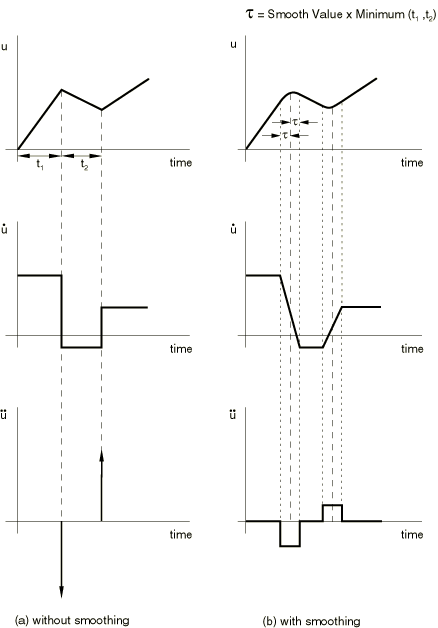
When the displacement time history is defined by a piecewise linear
amplitude variation (tabular or equally spaced amplitude definition), the
corresponding velocity is piecewise constant and the acceleration may be
infinite at the end of each time interval given in the amplitude definition
table, as shown in
Figure 8(a).
This behavior is unreasonable. (In
Abaqus/Explicit
time derivatives of amplitude curves are typically based on finite differences,
such as ,
so there is some inherent smoothing associated with the time discretization.)
You can modify the piecewise linear displacement variation into a
combination of piecewise linear and piecewise quadratic variations through
smoothing. Smoothing ensures that the velocity varies continuously during the
time period of the amplitude definition and that the acceleration no longer has
singularity points, as illustrated in
Figure 8(b).
Piecewise linear displacement definitions.
When the velocity time history is defined by a piecewise linear amplitude
variation, the corresponding acceleration is piecewise constant. Smoothing can
be used to modify the piecewise linear velocity variation into a combination of
piecewise linear and piecewise quadratic variations. Smoothing ensures that the
acceleration varies continuously during the time period of the amplitude
definition.
You specify t, the fraction of the time interval
before and after each time point during which the piecewise linear time
variation is to be replaced by a smooth quadratic time variation. The default
in
Abaqus/Standard
is t=0.25; the default in
Abaqus/Explicit
is t=0.0. The allowable range is 0.0
t
0.5. A value of 0.05 is suggested for amplitude definitions that contain large
time intervals to avoid severe deviation from the specified definition.
In Abaqus/Explicit if a displacement jump is specified using an amplitude curve (that is, the beginning
displacement defined using the amplitude function does not correspond to the displacement at
that time), this displacement jump will be ignored. Displacement boundary conditions are
enforced in Abaqus/Explicit in an incremental manner using the slope of the amplitude curve. To avoid the “noisy”
solution that may result in Abaqus/Explicit when smoothing is not used, it is better to specify the velocity history of a node rather
than the displacement history (see Boundary Conditions).
When an amplitude definition is used with prescribed conditions that do not
require the evaluation of time derivatives (for example, concentrated loads,
distributed loads, temperature fields, etc., or a static analysis), the use of
smoothing is ignored.
When the displacement time history is defined using a smooth-step amplitude
curve, the velocity and acceleration will be zero at every data point
specified, although the average velocity and acceleration may well be nonzero.
Hence, this amplitude definition should be used only to define a (smooth) step
function.
Using an Amplitude Definition with Secondary Base Motion in Modal Dynamics
When an amplitude curve is used to prescribe a variable of the model as a
secondary base motion in a modal dynamics procedure (by referring to the
amplitude from the base motion definition during a modal dynamic procedure),
the first or second time derivatives of the variable may also be needed. For
example, the time history of a displacement can be defined for secondary base
motion in a modal dynamics procedure. In this case
Abaqus
must compute the corresponding acceleration.
The modal dynamics procedure uses an exact solution for the response to a
piecewise linear force. Accordingly, secondary base motion definitions are
applied as piecewise linear acceleration histories. When displacement-type or
velocity-type base motions are used to define displacement or velocity time
histories and an amplitude variation using the tabular, equally spaced,
periodic, modulated, or exponential decay definitions is used, an algorithmic
acceleration is computed based on the tabular data (the amplitude data
evaluated at the time values used in the modal dynamics procedure). At the end
of any time increment where the amplitude curve is linear over that increment,
linear over the previous increment, and the slopes of the amplitude variations
over the two increments are equal, this algorithmic acceleration reproduces the
exact displacement and velocity for displacement time histories or the exact
velocity for velocity time histories.
When the displacement time history is defined using a smooth-step amplitude curve, the velocity
and acceleration are zero at every data point specified, although the average velocity and
acceleration may well be nonzero. Hence, this amplitude definition should be used only to
define a (smooth) step function.
Defining Multiple Amplitude Curves
You can define any number of amplitude curves and refer to them from any
load, boundary condition, or predefined field definition. For example, one
amplitude curve can be used to specify the velocity of a set of nodes, while
another amplitude curve can be used to specify the magnitude of a pressure load
on the body. If the velocity and the pressure both follow the same time
history, however, they can both refer to the same amplitude curve. There is one
exception in
Abaqus/Standard:
only one solution-dependent amplitude (used for superplastic forming) can be
active during each step.
Defining a Normalized Amplitude Curve
You can define a normalized amplitude and refer to it in multiple steps. The time values
for the amplitude must be in the range of 0–1. The normalized time is multiplied
internally by the current step time during the analysis. You can use a normalized amplitude
with tabular and smooth step amplitude definitions.
For example, you can use a normalized amplitude with loads or boundary conditions that are
applied similarly from step to step (such as ramping up to a constant value) but the step
times are different. In this case you only need to define the normalized amplitude once and
specify it in each of the steps.
Scaling and Shifting Amplitude Curves
You can scale and shift both time and magnitude when defining an amplitude. This can be helpful,
for example, when your amplitude data need to be converted to a different unit system or
when you reuse existing amplitude data to define similar amplitude curves. If both scaling
and shifting are applied at the same time, the amplitude values are first scaled and then
shifted. The amplitude shifting and scaling can be applied to all amplitude definition types
except for solution dependent, bubble, and user; for the actuator amplitude definition type,
only scaling and shifting of the amplitude magnitude is supported.
Reading the Data from an Alternate File
The data for an amplitude curve can be contained in a separate file.
Baseline Correction in Abaqus/Standard
When an amplitude definition is used to define an acceleration history in
the time domain (a seismic record of an earthquake, for example), the
integration of the acceleration record through time may result in a relatively
large displacement at the end of the event. This behavior typically occurs
because of instrumentation errors or a sampling frequency that is not
sufficient to capture the actual acceleration history. In
Abaqus/Standard it
is possible to compensate for it by using “baseline correction.”
The baseline correction method allows an acceleration history to be modified
to minimize the overall drift of the displacement obtained from the time
integration of the given acceleration. It is relevant only with tabular or
equally spaced amplitude definitions.
Baseline correction can be defined only when the amplitude is referenced as
an acceleration boundary condition during a direct-integration dynamic analysis
or as an acceleration base motion in modal dynamics.
Effects of Baseline Correction
The acceleration is modified by adding a quadratic variation of acceleration
in time to the acceleration definition. The quadratic variation is chosen to
minimize the mean squared velocity during each correction interval. Separate
quadratic variations can be added for different correction intervals within the
amplitude definition by defining the correction intervals. Alternatively, the
entire amplitude history can be used as a single correction interval.
The use of more correction intervals provides tighter control over any
“drift” in the displacement at the expense of more modification of the given
acceleration trace. In either case, the modification begins with the start of
the amplitude variation and with the assumption that the initial velocity at
that time is zero.