About Swept Volumes | ||||
|
| |||
A sweep collectively plots the position of the selected part at each step in the simulation, then connects the discrete position plots with continuous geometry based on the specified interpolation options. The result is a smooth three-dimensional body.
A swept volume is defined by one or several bodies associated with existing products, and according to a reference marker. By default, the reference marker is a stationary, universal reference marker used to represent the true motion of the selected elements in a three-dimensional space.
You can specify another marker from a different moving product of the active mechanism as the reference point. In this case, the generated swept volume represents the motion of the elements according to the relative motion of the reference part or product.
The swept volume is created under the active mechanism. To generate the result of a swept volume according to the defined parameters, run an analysis case referencing the active mechanism. For more information, see Computing Analysis Cases.
In the tree, the result of the swept volume appears under the Probes node of the Analysis Case Results element. Under the Model node, a 3D shape corresponding to the geometric representation of the swept volume appears under the root product.
The following figure illustrates the swept volume of a pendulum: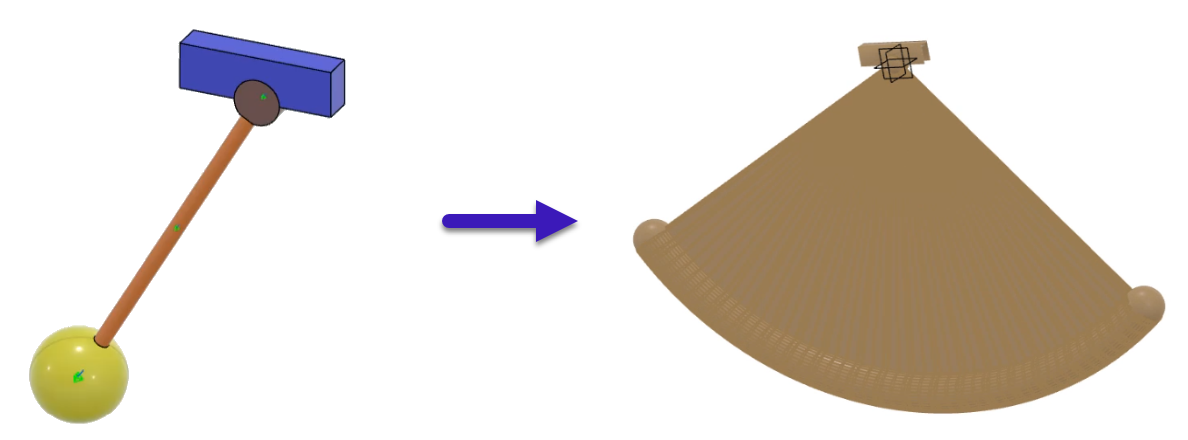
You can generate the swept volume of a product or part according to the following parameters:
- Filtering Positions
- Wrapping
- Simplification
Filtering Positions
You can filter the body positions to:
- Reduce the number of predefined positions recorded in the simulation.
- Control the accuracy of the swept volume.
To do so, you can define a minimum value for the deviation, represented by a red arrow in
the figure below. When the deviation value is lower than the filter precision, the
intermediate positions are removed. Use this parameter to reduce the computation time and
the resulting size of the swept volume. 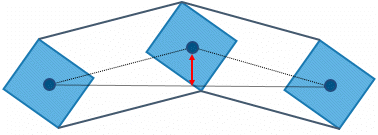
Wrapping
You can generate a wrapping envelope from existing geometries to reduce the number of internal triangles.
By default, the app creates a wrapping envelope around the geometries to compute the wrapping volume. The envelope is a convex envelope, subdivided into voxels, that is data samples regularly spaced on a three-dimensional grid.
To generate the wrapping, a set of points regularly spaced on the envelope of the original geometry is computed. The distance between two points is called a grain. The set of points is then offset to include the entire original geometry, and triangles are generated from the set of points.
Simplification
You can use the simplification parameter to reduce even more the number of triangles.
| Important: To use the simplification parameter, you must select the wrapping option. |
Use this option to generate a coarser mesh using an approximation error that removes or merges existing triangles.