Remote Forces | |
| |
A remote force definition consists of four components:
- Application point
- Direction
- Transmission surface
- Magnitude
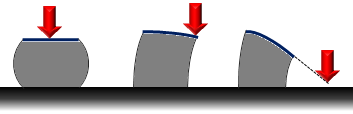
The force is transmitted from the application point across the transmission surface. Applying the force at the center of the transmission surface distributes the force evenly across the surface. If you move the application point so it is not at the center of the transmission surface, the entire surface deflects accordingly. If you move the application point so it is not even touching the transmission surface, the force is transmitted as if invisible beams were connecting the application point to the transmission surface.
This treatment of forces is a very good approximation of how actual structures behave. For simple weights or direct loads, you can select several faces and apply the force at the default center location. Alternatively, the selected face might represent a connection with another part in your assembly, and the applied force occurs via contact at the transmission surface. Offsetting a force is an easy but effective way to represent a force that originates far from your part but is transmitted to your part via other assembly components.
The direction of the forces also greatly influences the results. In many models the forces are aligned with an axis direction. If the model does not move or deform or if the direction of the forces is constant, the global axis directions allow you to specify an accurate direction. You can use a local coordinate system to accurately align your forces along other directions rather than calculating force vectors based on the global directions. For example, you might have a part that can be oriented differently in an assembly and is subject to different loads based on its orientation.