The Finite Element Method | ||
| ||
Finite Elements
Predicting how a physical load affects a complex part is an extremely difficult task. However, predicting how a load affects a small, simple part—such as a tiny block—is much easier. The finite element method is based on this assumption: by treating a large, complex part as a collection of small, interconnected, simple pieces, you can predict the response of each simple part and see how it impacts adjacent simple parts.
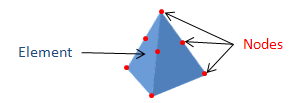
The large part is broken down into
smaller components, in this case, tetrahedrons. Each of these tetrahedrons is called
an element; points along the edges and corners of the tetrahedrons are called nodes.
Meshing and Remeshing
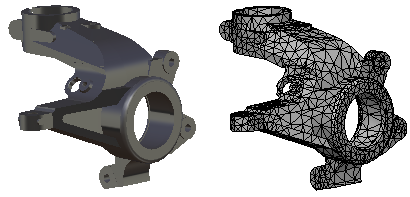
The process of splitting a complex part into elements is called
meshing; the resulting collection of elements is called a finite element model.
A typical finite element model can contain anywhere from thousands to millions
of elements.
The smaller an element, the easier it is to predict its response. However, when you reduce the element size, more elements are required to fill the geometry of a part. A finite element model with very small elements yields the most accurate results, but the simulation takes longer because it must predict the response of more elements.
Your part is meshed automatically when you perform a simulation. Initially, the elements
throughout the finite element model are of roughly uniform size. However, if you
configure your mesh density settings to request more accurate results, your part may
be remeshed at the end of a simulation. The remeshing uses smaller elements in
regions that have potentially inaccurate results. A new simulation runs with the new
finite element model; the smaller elements produce more accurate results than the
original finite element model. 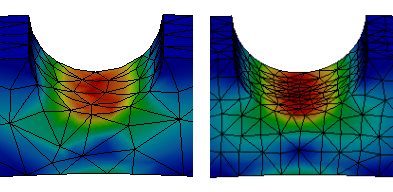
In some
cases, the original finite element model provides sufficiently accurate results
given the levels of stress or deformation in the simulation; in these cases
remeshing is not required.
The finite element model is associated with a simulation object and is also added to the original product structure as a representation.
Materials
The material that you apply to your part is also applied to each element in the finite element model. The material determines the stiffness and conductivity of the element and how it responds under a load. Complex material characteristics such as plasticity are accounted for in each individual element.
Restraints and Loads
Although you apply restraints and loads on the original geometry of your part, they are transferred to the nodes of the associated finite element model.
Restraints constrain the motion of a node in a particular direction during the simulation. In
the simplest case—a clamp—the nodes may not move at all. In more complicated cases,
such as with ball joints, the nodes are allowed to move only along a predefined
direction or path. 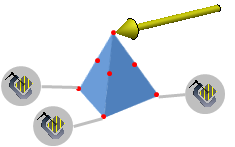
Loads are also applied to the nodes in your finite element model. Within any given element, the load on the node causes the element to deform slightly. While the deformation of a single element is relatively straightforward, the node on one element is usually also connected to an adjacent element. The simulation must consider how the deformation of one element affects the deformation of any adjacent elements, and so on.
Solution Increments
The power of simulation lies in the ability to account for the various loads and responses in connected elements. The simulation is complete when an equilibrium is established between the external loads and temperatures and the internal responses within the finite element model.
In some cases, it is impossible to determine a solution based on the full load ; local changes or responses may be too significant to establish an equilibrium for the entire part. In such situations, the simulation uses an incremental approach, applying a portion of the load and then determining the response of the entire part. Once equilibrium is established at the partial load, additional loading is applied, and a new equilibrium is determined.
For stress simulations, the incremental physical loading is directly related to how stopping criteria are assessed . Each time an equilibrium state is achieved, the plastic strain is verified in the model. If the specified stopping criterion is exceeded anywhere, the simulation ends at the current equilibrium configuration. We cannot determine the exact point at which the stopping criterion is exceeded; checks are made only during periodic states of equilibrium. A simulation may also exceed the stopping criterion and run to completion: if it is possible to establish equilibrium initially under the full loading, the solution is determined without ever checking the stopping criterion.