You can
automatically instantiate a mechanical interface template which is derived from an instance in the same 3D shape representation.
When you instantiate a mechanical interface template in a context, the mechanical interface is tagged with several identifiers. With the help of these identifiers, you
can instantiate the template in another context which
is derived from the first context after performing the following operations:
Copy/Paste as specified
Copy/Paste as result
Boolean operations such as add, remove, intersect, union, and assemble
Transformations such as symmetry, translation, rotation, and axis to axis
Before you begin:
You must be an
author to perform this task.
Open a 3D shape representation. Instantiate a template in a context. Perform
any of the above mentioned operations on it.
, click Mechanical Interfaces Reveal.
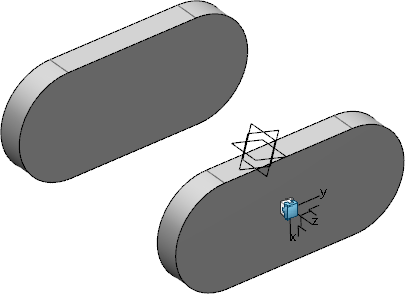
Example: A pad with a mechanical interface template instantiated on it is copied and pasted as specified
Select the appropriate Reveal Context in the tree.
The reveal context is the scope in which you want to perform the reveal
operation. The default reveal context is the active 3D shape representation
which consists of all bodies and geometrical sets.
Note:
You can select or
remove one or more specific bodies or geometrical sets.
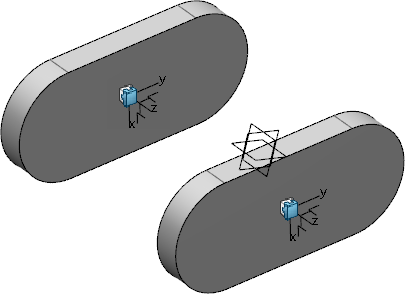
Click OK.
The reveal operation is performed and the template is instantiated on
other suitable context within the selected reveal context. The mechanical interface template is instantiated on the copied pad
New nodes are added to the Interface Set and
Publications nodes in the tree. They indicate the creation of an instance and its mechanical interface axis with the Mechanical Interfaces Reveal
command.
The newly instantiated mechanical interface can be used for engineering connection after checking for compatibility. For more
information, see Mechanical Interface Templates Capture User's Guide: Checking Compatibility of Two Instances.
 .
.