Robot Handles
You can use the Robot handles to perform transformations on a whole product or individual parts.
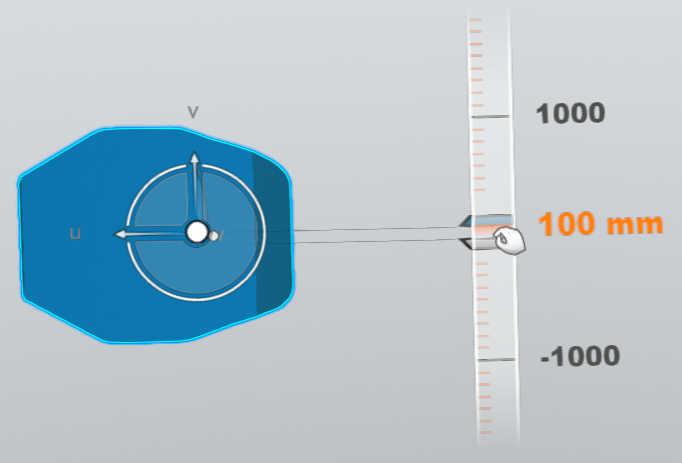
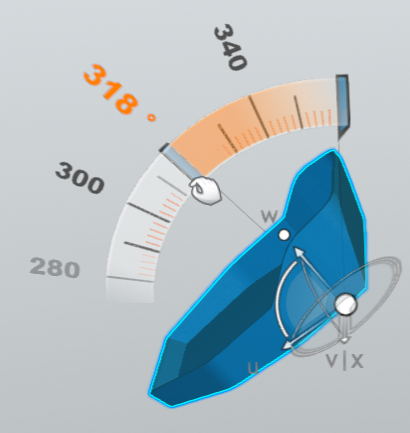
When the Robot is in the viewport, it has three axes represented by the letters UVW. These letters are used as relative coordinates based on your selected product or part. The UVW mapping is based on the XYZ global coordinates using UVW to avoid confusion with global coordinates.
When you dock the Robot to the lower right of the viewport, its three axes take the XYZ global coordinates. The w-axis (z-axis) is the default orientation.
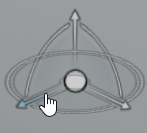 |
Axis handle |
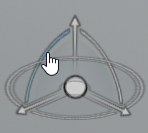  |
Arc handles |
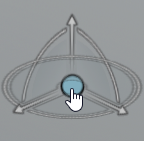 |
Center handle |
 |
Plane |
The axes, arcs, and center correspond to the Robot handles. You can also manipulate the plane of the Robot. When you select a Robot handle or the plane, it turns blue and lets you manipulate the position and orientation of products or parts. Drag the axis handles to move products or parts linearly along the selected axis, or the arc handles to rotate products or parts about the selected axis.
The center handle represents the pivot point of the Robot. The pivot point determines the center about which you can perform linear and angular transformations, and modify the scale of products and parts.
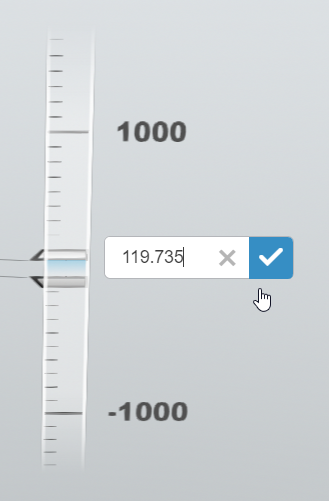
When you manipulate the handles of the Robot, a ruler appears. For more information, see Performing Transformations with the Robot and the Ruler.
After any manipulation or transformation with the Robot, you can restore your products or parts to their default state using the
Reset Product to Default
 and
Reset Part to Default
commands
respectively; therefore, deleting any override in the process. Alternatively, you can
select a product or part in the Scene Changes list of the
Models panel, and click or tap Delete
and
Reset Part to Default
commands
respectively; therefore, deleting any override in the process. Alternatively, you can
select a product or part in the Scene Changes list of the
Models panel, and click or tap Delete
 to delete any override individually.
to delete any override individually.
Any modification to the position, the orientation, or the scale that you do using the Robot, affects the values specified in the Product and Part Properties panel.




 .
.