Object Frames | ||||||
|
| |||||
Applicability
| Usage | Impacted operations/commands |
|---|---|
| Display/defines position relative to specific object frames | Jog/Profile/safety zones |
| Robot task simulation | Teach (only applicable for Cartesian target) |
| Define the local origin used for all robot motion targets when generating a robot program | Robot program download/upload |
| Line Tracking – Needs to be attached to Trolley or Part that is moving with Trolley | RRS Simulation and OLP download |
| Positioner Programming – Needs to be attached to the Part or disk. | OLP download |
| Fixed TCP – Should be attached to the Robot Mount Plate or a Part that is attached to or grabbed by Robot | OLP Download |
Using Object Frames with Cartesian Targets

Note:
In both cases shown above, 100mm is the value shown in Teach.
Using Object Frames with Tag Targets
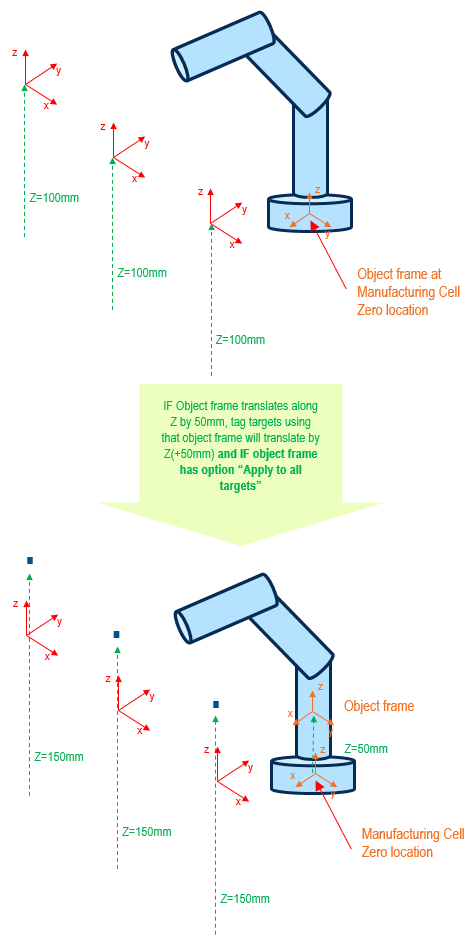
Note:
Note: If you select a Task Motion Operation in Teach that has an Object frame with a Z
offset of 50mm as shown above, the robot will move the location shown as a blue dot, not to
the Tag Point.
Note:
This option is maintained for V5 legacy purposes, but it is not recommended as it is
less intuitive and prone to user error. It is recommended to instead use offset moves on
each operation.