Modifying the Local Zero of a Controlled Resource | ||||||
|
| |||||
Click Play to watch the video:
-
In the Motion Controller section of the action bar,
click Reset Local Zeros
 and select a
resource.
The Resource Local Zero dialog box appears.
and select a
resource.
The Resource Local Zero dialog box appears.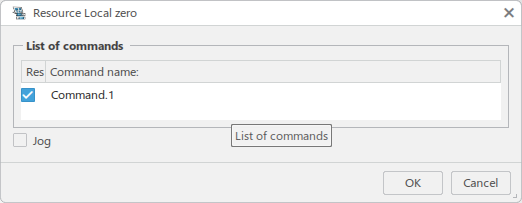
List of commands lists all commands associated with the resource.
-
Select Jog.
The Jog dialog box appears.
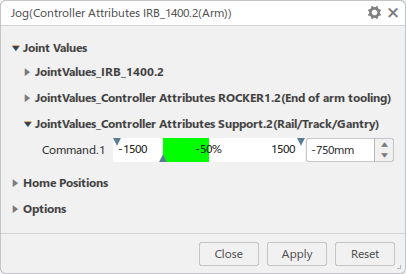
-
Move the slider or enter a value to the position that is to serve as the new local zero
position, and click Close.
The new zero position is saved for the resource. -
To verify the new local zero position, click Jog Mechanism
 and
select the same resource.
and
select the same resource.
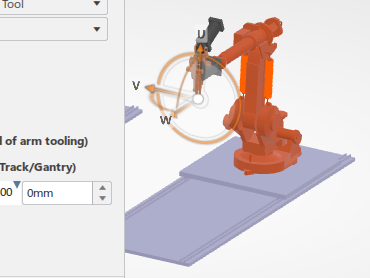
-
Enter 0mm for the position of the command.
The resource moves to the new zero position.