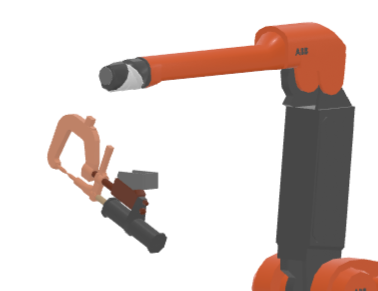
Mounting a tool on a robot
You can mount a tool on a robot.
- In the Motion Controller section of the action bar, select Set Tool
 .
.The Set Tool dialog box appears.
-
In the Options section of the dialog box, select End Of Arm Tooling as the Usage Type, if it is not already selected.
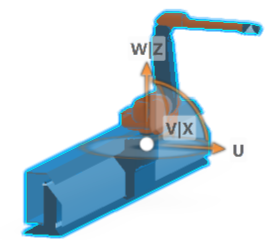
The Mount Location displays the mount port that the tool will be snapped to, and the Base Port displays the base port that is used on the tool.

The Tool Profile shows the name of the weld gun and the TCP (Tool Center Point) that is used.