Defining Travel Limits | ||
| ||
-
From the Motion Controller section of the action bar, select Travel Limits
 .
.
-
Select a device.
The Travel Limits dialog box appears for the selected device.
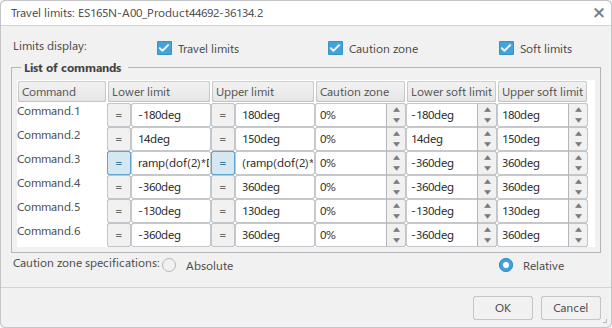
Limits display allows you to choose the types of limits that are shown in the table. You can choose to view or hide Travel limits, Caution zone, and Soft limits.
Caution zone specifications allows you to specify that Absolute (deg) or Relative (%) values are used with respect to the lowest range limits.
Note: To input expressions instead of values, click = next to the command name. When clicked, you can enter an expression for both Lower limit and Upper limit. The expression for the travel limits can be defined in terms of the pre-defined functions and operators that are described in Defining Kinematic Relationships. -
From the Motion Controller section of the action bar, click Jog Mechanism
 and select the
same device.
The Jog dialog box appears.
and select the
same device.
The Jog dialog box appears. -
Jog the commands that you have defined limits for, and note the color changes
as you reach each defined limit.