Generate a Modelica Model from a Kinematic Mechanism, Using a Command
You can generate a Modelica model from a kinematic mechanism of a physical product,
using a command.
Context: The following options are only available when using the
command:
- Creating 3D representations of the shapes in VRML format.
- Generating a World component and connect it to fixed parts if the physical model
contains published axes.
-
Open a physical product containing a mechanism:
-
From the top bar, search for the physical product.
For more information about searching, see 3DEXPERIENCE
Platform:Top Bar.
-
To open both the physical and logical parts of the product, right-click it in the
Search Results
panel and select
 . .
The product is opened in authoring mode.
-
Analyze and compute the masses and inertia of the 3D parts. For more information,
see Managing Masses and Inertia.
Note:
If you only want to update mass and inertia on parts before translation, skip
this step.
-
To store the generated model, create a new Dymola Behavior library, with the name
MyGeneratedModels. See Create a Dymola Behavior Library.
- You enter the Dymola Behavior Modeling
app in a new tab.
- A Dymola Behavior Library MyGeneratedModels is created in
the new tab.
Note:
To work more comfortably between the apps, make both tabs visible on the
screen.
-
From the Behavior Tools section of the action bar, click Generate from Kinematic
 to generate the Modelica model. to generate the Modelica model.
The Generate from Kinematic dialog box appears. Note:
If
you already have an active model that is generated by this command, the dialog is
prefilled with the setup used for generating this model.
-
Select the mechanism:
-
Click the Mechanism: box.
-
In the tab where the mechanical model is seen, in the tree, click any joint or
command of the mechanism to be used for Modelica model generation.
The name of the mechanism appears in the Mechanism:
box.
-
Select the parent class where the generated model should be inserted:
-
Click the Insert In: box.
-
In the Dymola Behavior Modeling
app, from the Package Browser,
or from the tree, click the package where you want to insert the
Modelica representation.
-
Click the Output class name: box and enter the name of the
Modelica model to be created. In this scenario, enter
MyGeneratedCylinder.
- Optional:
You can specify more options by clicking More:
| Option | Description |
|---|
| Generate VRML from parts |
Generates 3D representations of the shapes, in VRML format. Note:
If cleared,
the generated model includes links to the initial 3D physical model, so it can be
animated from the results. By default, this option is cleared.
|
| Update mass and inertia on parts before
translation |
Updates mass and inertia on parts before translation. Note:
By default, this
option is cleared.
|
| Include motors |
Includes motors attached to commands. Note:
By default, this option is cleared.
In this scenario, keep this option cleared.
|
| Always generate a world component |
Generates a World component and connects it to fixed parts, even if the
physical model contains published axes by activating. Note:
If not activated, the
World model is only generated when the physical model does not contain any
published axes. By default, this option is cleared. In this scenario, keep this
option cleared.
|
| Rebuild at PLMUpdate |
Rebuilds the model when performing any general update command, that is, any of
the commands Update or Update
Assistant. Note:
By default, this option is activated. A reason for
clearing this option can be if you want to compare two alternatives of a model
without risking that an update command updates the wrong model.
|
| Joint boundary kind |
Defines how to interpret limiters on revolute, prismatic, and cylindrical
joints when generating the Modelica representation. Select any of:
- Warning: When the joint reaches the limit value, a
warning appears and the simulation continues.
- Error: When the joint reaches the limit value, an error
appears and the simulation stops.
- Limiter: A Modelica limiter is inserted between the
flanges of the Modelica joint, limiting the joint´s movements between the
defined limits.
|
-
Click OK to start the model generation.
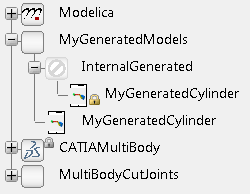
The following is created under the selected target package
MyGeneratedModels:
- A class
InternalGenerated that contains the generated model
MyGeneratedCylinder.
Note:
This class is locked, you should
not edit this class.
- An extended class
MyGeneratedCylinder.
Note:
This is the class that you can
edit, for example to extend the model or replace components.
Notes:
- If required, the geometries of the parts involved in the mechanism are loaded.
- The root physical model containing the mechanism you selected is set to
authoring mode to retrieve some data from that model.
- If you have already loaded the physical product in the session, for example, you
have opened it in a tab, only the relevant parts are loaded, not the full product,
to not alter any filtering you have done. If the product is not in the session,
the full product is loaded.
- For the features of the generated classes, for example, handling of mechanism
commands, user-driven Point-Curve joints, dress-up pattern, published axes, color
animation, replacing of components, see About Generating a Modelica Representation of a Mechanism of a Physical Product.
- If the physical model contains any publications of Knowledgeware parameters
directly under the product that contains the selected mechanism, then the
corresponding Modelica parameters are created in the generated model. Those
Modelica parameters are exposed in Knowledgeware, and a formula is created to
assign the same value as the value of the published parameter.
-
Test the generated model. For more information, see Testing the Generated Model.
Generate a Modelica Model from a Kinematic Mechanism, Using a
Scripting Method
You can generate a Modelica model from a kinematic mechanism of a physical product,
using an Engineering Knowledge Language (EKL) method when both the kinematic mechanism and the
target Modelica package are created and open.
Context:
Note:
Compared to the scenario above, in the below scenario you create a
behavior with the Modelica target package, not a stand-alone target package.
-
Open a physical product containing a mechanism:
-
From the top bar, search for the physical product.
For more information about searching, see 3DEXPERIENCE
Platform:Top Bar.
-
To open both the physical and logical parts of the product, right-click it in the
Search Results
panel and select
.
The product is opened in authoring mode.
-
Analyze and compute the masses and inertia of the 3D parts. For more information,
see Managing Masses and Inertia.
-
On the Logical node in the tree, create a new logical reference containing a Dymola
behavior:
-
In the tree, right-click the Logical
node and select Insert New Logical Component.
-
In the New Content panel, expand
Logical and select Logical
Reference.
A logical reference appears under the Logical node
in the tree.
-
From the Behaviors section of the action bar, click Insert New Behavior
Representation
 . .
-
In the tree, click the logical reference you created.
-
In the New Content panel, select Dymola
Behavior.
You have created a logical reference (component) with a Dymola behavior inside
it. For more information, see the corresponding documentation in Functional & Logical Design User´s Guide: Managing Behaviors in Functions and
Logical Components. -
In the Dymola behavior, create a package that is to be the target for the Modelica
representation of the mechanism:
-
In the tree, expand the logical reference you created and
double-click the node MainModel
 . .
The MainModel
represents the Dymola behavior.
The behavior is opened in the Dymola Behavior Modeling
app.
-
From the Behavior Authoring section of the action bar, click New Modelica Class
 . .
-
In the New Class dialog box, do the following:
- In the Name
box enter, for this scenario,
MyGeneratedModels.
- From the Class
type list, select the Package type.
- Make sure that the Insert
in dialog box displays
MainModel, otherwise
select this model from the Package Browser.
- Click Ok to
validate the selections.
-
To leave the Dymola Behavior Modeling
app, from the action bar, click Exit App
 . .
-
Create the scripting function:
From the Compass, click
-
From the action bar, click Action
 . For more information about actions, see
Engineering Rules Capture Users Guide: Working with Actions: Creating an
Action. . For more information about actions, see
Engineering Rules Capture Users Guide: Working with Actions: Creating an
Action.
-
Create a script with two arguments corresponding to the target Modelica package and
the source mechanism. In the Action Editor, do the following:
-
In the Argument list:
- Right-click <Add new
argument> and select Add new argument.
- Type
MyTargetPackage.
- Click the corresponding
Type box.
- From the list, double-click
ModelicaPackage
-
Create a second argument MySourceMechanism of type
Feature in the same way as the first argument.
-
Click the text pane to enter it and press Enter to go to a
new line.
-
Create the text in the script:
The script is complete. MyGeneratedCylinder is the name you select for the
model to be generated in the Modelica target package, to be consistent with the task
above. Note:
If you want to take into account any motors defined in the physical
mechanism, enter instead
MySourceMechanism,"MyGeneratedCylinder",true)
The script is now
MyTargetModelicaPackage.GenerateBehaviorModelFromMechanism(MySourceMechanism,"MyGeneratedCylinder")
-
Click OK.
In the tree, under the  Relations.1
Relations.1 node, the action is displayed with an icon . -
In the tree, under the
Relations.1 node, right-click Action.1 and
select .
-
From the Insert Object dialog box, specify the arguments and run
the script:
-
In the tree, click MyGeneratedModels
to specify the target Modelica package for the generation.
-
In the tree, under the Physical node,
click the mechanism representation of the mechanism to be used in the generation.
-
Click OK.
The script is executed with the result corresponding to the result of Step 13
in the task above, except that the model is generated inside a behavior.
-
Leave the Engineering Rules Capture
app:
From the Compass, click .
-
Test the generated model. For more information, see Testing the Generated Model.
Managing Masses and Inertia
You can manage the masses and inertia of the 3D parts.
-
To analyze the masses and inertia of the 3D parts, do the following:
-
In the tree, double-click the root node of the physical
product to select it.
An example of selection: 
-
From the Tools section of the action bar, click B.I. Essentials
 . .
-
In the B.I.
Essentials dialog box, select Weight
Definition.
- The result or the analysis appears in the B.I.
Essentials dialog box.
- An information message appears displaying links.
For more information about weight definition, see Weight Analysis Users´s Guide: Defining Weight: Launching
Weight Definition.
-
Compute the masses and inertia of the 3D parts.
-
In the information message, click Click this hyperlink to update the
weight of this element considering each child weight declared in the
system.
-
In the weight attributes table, click Update to perform a
heavy update.
For more information about the weight attributes table and the corresponding
commands, see Weight Analysis Users´s Guide: Defining Weight: About Defining
Weight: About the Weight Attributes Table.
- The masses and inertia are updated.
- An information message appears displaying links.
- Optional:
To replace computed by declared weight for a part, you can select different 3D
parts and click the link Click this hyperlink to replace computed by
declared weight.
-
Close the B.I.
Essentials dialog box.
-
Leave the B.I.
Essentials
app:
From the Compass, click
The mechanism is open and the masses and inertia of the 3D
parts are computed.
|
 > Preferences. For more information, see Native Apps Preferences
Guide: 3D Shape Infrastructure.
> Preferences. For more information, see Native Apps Preferences
Guide: 3D Shape Infrastructure.