GOTO Dialog Box | ||
| ||
Walk
Using the Robot, create or modify the exiting walk path or its attributes.
The Walk tab contains the following objects:
- Walk to Location.
- Using Human Location
 , you
can create or select a Human Location for the manikin to move to. See Creating a Human Location.
, you
can create or select a Human Location for the manikin to move to. See Creating a Human Location.
- Walk Type.
-
- Walk forward.
- Walk Backward.
- Side Step.
- Stride
-
- Short Stride.
- Medium Stride.
- Long Stride.
- Arm Swing
-
- Both .
- Left Only.
- Right Only.
- Current Positions.
- Upper Body Pose
-
- Keep Current.
- Reset.
- Collision Free
-
Choose from:
- Off - Collision is off.
- On - This enables you to select the minimum distance (in mm) by which the manikin has to clear
the obstacles during a collision free walk. The collision
free algorithm works by approximating the manikin as a
cylinder (of radius 150mm). Takes an additional 25mm into
account for the arms. The default value is 175mm. This shows
the clearance =0mm (1) and the clearance = 175mm(2).
 Note: This generates a collision free path from the current manikin location to the target location. This is on the same plane and has the capability to ignore picked objects during collision-free path planning.
Note: This generates a collision free path from the current manikin location to the target location. This is on the same plane and has the capability to ignore picked objects during collision-free path planning.Different proposals:
- Specify a Human location by clicking in the window. The collision free path computes
and the Manikin moves on the human location. Once
the collision free walk path computes, you can
modify the path. After a manual modification,
there is no guarantee that the modified walk path
is collision free.
- Double-click the Human Task thumbnail
to start the Sequence Editor.
Double-click Walk activity to edit. Manikin moves
onto the human location and the walk path are on display.
- Switch Off or On the collision free behavior. The walk path does not modify.
- Drag the human in the free walk mode. If the collision free option is on, a collision free walk from the manikin's earlier position to the new position appears. The earlier part of the walk path does not get modified.
- Modify the clearance value and the walk path is the same. If dragging the manikin, or selecting a new human location, this takes the new clearance value into account. This computes the walk path from an earlier manikin position to the new position.
- Double-click the Human Task thumbnail
to start the Sequence Editor.
Double-click Walk activity to edit. Manikin moves
onto the human location and the walk path are on display.
- A collision free path retains or a modified path, once you further drag the manikin
or you select a new human location, the system can
propose a collision free path. This is between
points 2 (Intermediate position) and 3 (Next
position) or between points 1 (Initial position)
and 3. Select one of the walk paths (by clicking
in 3D) then the walk path modifies accordingly.
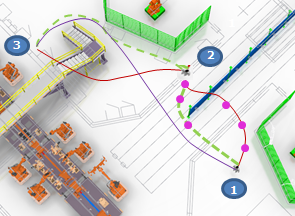
The Line color:
- Red: free walk path specified by you.
- Green: collision free walk path.
- Purple: new collision free walk path proposed taking into account the initial position (1) and the next position (3) ignoring the intermediate position (2).
Limitations:
- Collision free walk algorithm works only if the manikin is standing on the walk plane and defining the target point on the same plane.
- Only provides a 2D collision free walk path. No capability to change posture to avoid overhead objects.
- Does not detect a picked object as colliding. However, during collision free walk path computation, manikin approximates with the cylinder. Hence, there may be instances where the arm swing and picked objects collide with obstacles in a constricted environment.
- Not updating the walk path after context (different simulation state applies) it changes.
- Computes Collision free path only for walk forward and backward. Side Step walk cannot be collision free. Does not support a Side step walk on curved path.
- Specify a Human location by clicking in the window. The collision free path computes
and the Manikin moves on the human location. Once
the collision free walk path computes, you can
modify the path. After a manual modification,
there is no guarantee that the modified walk path
is collision free.
- Motion Basis
-
- Time - This enables you to specify a standard walk speed for all the walk activities created.
- Speed - When you specify a time for a walk activity, the time
distributes among the constituent
MoveToPostures in proportion to the
distance between them. This distance is the distance between the
H-point of the current
MoveToPostures and previous. The
speeds are in (m/s) for the corresponding speed in a percentage
%.
Uses the default speed automatically at the time of creation of the walk, and the motion basis is specify as time for Walk forward, Walk Backward, and Walk Sideways.