Robot Definition
A robot is defined by a robotic cell composed of a control equipment resource. The control equipment resource drives the robot arm and auxiliary resources such as rails and rotary tables.
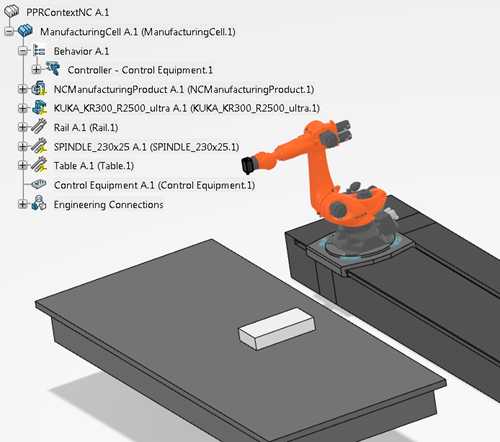
Robot DefinitionA robot is defined by a robotic cell composed of a control equipment resource. The control equipment resource drives the robot arm and auxiliary resources such as rails and rotary tables.
Milling Operation Parameter DefinitionLateral Axis of the SpindleYou can define x-axis parameters to control the robotic cell in the Lateral Axis sub-tab available in the Strategy tab of any milling operation dialog box. The Mode parameter lets you specify whether the x-axis direction of the tool port axis is constant or tangent to the path. The Roll offset parameters specifies an angular offset of the lateral direction, in a plane perpendicular to the axis. Control Equipment Parameter DefinitionYou can edit control equipment parameters of a robot cell by right-clicking a control device in the Resource Configuration View and selecting Edit Local Parameters. You can specify a name, add a comment, and define the type control equipment. The two types of control equipment are:
Note:
The content displayed varies according to the type of controller
selected. The parameters are available in the context of a the
manufacturing cell
only and are not stored in the robot cell itself.
Robotic TranslatorsMachining programs must be translated into programming languages that are specific to robot controllers. When a robotic cell is controlled by a robot controller equipment resource, an Offline Programming (OLP) robotic translator must be used to modify the output to a Native Robot Language. OLP translators define the translation format. Default translators are provided as 3dxml files, written in VB.NET and can be stored as VSTA macro library objects. You can define the robotic translator under the Numerical Control tab of the Local Parameters dialog box. There are two types of OLP translator output formats:
Robot OutputYou can output different information related to robots in an APT file, such as robot motion type, configuration numbers and integer values. For more information, see Robots. The Output Cycle syntax option must be clear to generate the information. This option is available in the NC Output tab of the dialog box that appears when you edit the NC output parameters of a robotic cell. CommandsThe following commands are not supported with robots:
Commands for editing tool paths are not supported. | |||||||||||||||||||||||||



