Creating a Robot Program | |||||
|
| ||||
-
From the Analysis & Output section of the action bar, click Create Robot Program
 .
You are prompted to select a robot, motion group, or task.
.
You are prompted to select a robot, motion group, or task. -
Select a robot.
The Create Robot Program dialog box appears.

If the translator for the robot is in the database, it is automatically selected.
 Note: If a translator for the selected robot is not in the database, you must first import it as described in Importing Ready-To-Use Robots Installed On Premises.
Note: If a translator for the selected robot is not in the database, you must first import it as described in Importing Ready-To-Use Robots Installed On Premises.- If a motion group was selected, all procedures for the main robot in that motion group are displayed as available, including robot tasks, main procedures, services, test procedures, and sub procedures.
- If a task was selected, all procedures owned by the robot that the task belongs to are displayed in Available Tasks, and the selected task is automatically included in Selected Tasks to be downloaded.
- Optional:
Click Select Translator
 to choose a
different translator, if necessary.
to choose a
different translator, if necessary.
You may want to select a different translator to:
- Use a different version of the current translator
- Use the XML translator
- Use a customized translator before updating your settings to use the customized translator permanently
- Create or import a program for another robot manufacturer (useful when replacing a robot)
The Applicative Search bar is highlighted, allowing you to enter a search term for the required translator.
-
For some translators, an Options list also appears that
allows you to select a specific robot controller version:
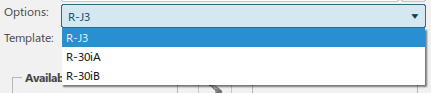
In some cases the translation can be modified based on the robot controller version used.
-
Click to select a
Template directory.
If the current translator supports template download, Template is available to select the template directory that contains your template programs. The specific behavior for how a template is used is translator-specific.
When a template directory is specified, the controller backup is used as a template for generating the robot programs. Depending on the features and controller type, the system variable and existing programs are used to improve the generated programs. See Supported Translators for more information regarding template support for the translator you are using.

You can click
 to clear
the current selection.
to clear
the current selection. -
From the Available Items list, select robot programs to
download and click
 to move them to the Selected Items list.
to move them to the Selected Items list.
Programs can be moved between Available Items and Selected Items with the following commands:
Moves selected items in the Available Items list to the Selected Items list. 
Moves all of the items in the Available Items list to the Selected Items list. 
Returns all of the items in the Selected Items list to the Available Items list. 
Moves selected items in the Selected Items list to the Available Items list. 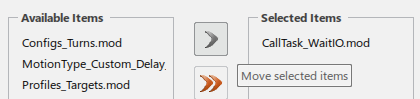
-
Select the required download options.

When Use Design Positions is selected, tag and part locations are moved to their nominal state.
- Leave this option cleared if you are, for example, downloading tags that are attached to a positioner that is not controlled by the robot, and the positioner needs to be rotated from its design position into the welding position before downloading.
- Similarly, you would leave this option cleared if you are using product buildup and the positions of the products are controlled by the process plan.
Select Download Called Tasks to download any tasks that are called by the selected task(s).
-
Select Simulation Verified Download to expand and view its
options.
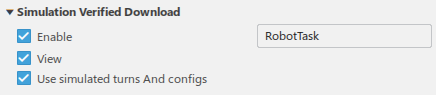
- Select Enable to verify the download by the simulating the task. You can then select the task to simulate.
- Select View to visualize the simulation of the selected task.
- Select Use simulated turns And configs to use the turns and configs from the simulation rather than those chosen during Teach.
The selected task is simulated when you click Next. During simulation, the following information is captured for each robot motion:
- The joint values for the robot
- The Cartesian position with turns and configs
- The profiles used (tool, object frame, accuracy, and motion)
- The locations of products that are used in the robot task. A product is used if tags used in the robot task are attached to that part.
The values above are used in the downloaded program in place of the persisted values.
-
Click Next.
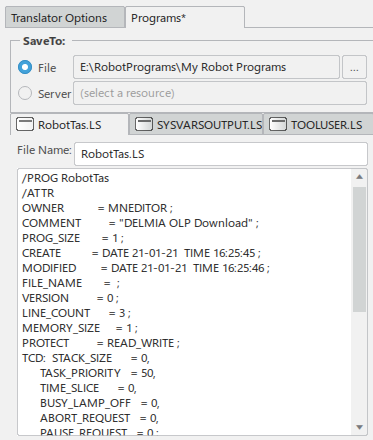
The robot programs are generated and the Programs tab appears:
-
In the SaveTo: section, you can choose to save the
generated programs locally to a specified directory, or the server.
To save the programs locally, select File and click
to select the
destination directory. The selected directory then appears in the dialog
box. 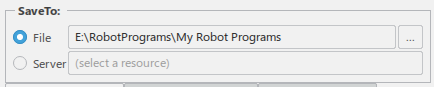
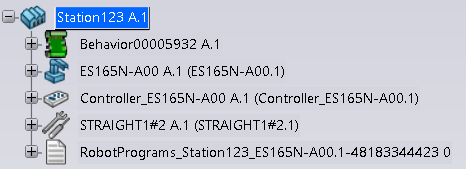
To save the programs in the database, select Server and select a resource (Manufacturing Cell, Robot, Tool, or Control Device). The selection is then indicated in the dialog box.

If the files downloaded already exist in the zip file for the robot attached to the resource selected, a warning message appears. You can use the File Name: field to edit the names of the files.
When you explore the resource, you can view the attached document that was created during download.
-
Each generated program appears in a respective tab.
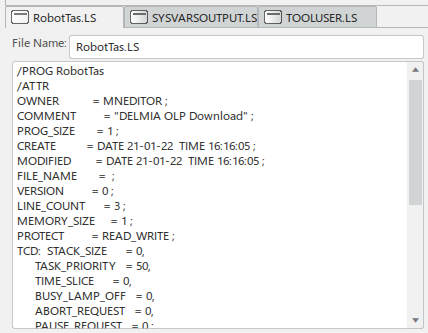
- NRL programs can be edited manually. All changes are saved.
- You can rename the file by editing File Name:.