Defining Interference Zones Between Multiple Robots | ||||||
|
| |||||
-
From the Programming section of the action bar, click Interference zone computation
 .
The Interference zone computation dialog box appears, and the Specifications tab is selected.
.
The Interference zone computation dialog box appears, and the Specifications tab is selected.
-
Select all robots having tasks that need to be interlocked.
The List of available tasks is populated with the tasks assigned to each selected robot.
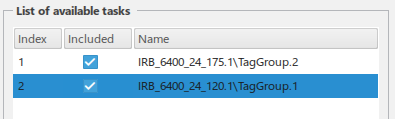
On a given robot, you can filter the tasks available by deselecting specific tasks in the Included column.
Note: Tasks controlling multiple robots together can not be selected for interference zone computation. When a task is controlling multiple robots, the synchronization between them is already managed through specific instructions and not input/output signal exchanges. -
Click Compute pairs to compute a list of robot pairs based on
the list of available tasks.
Selected robots are grouped in pairs to be analyzed in the List of pairs list.

- You can choose to exclude specific pairs from analysis by deselecting them in the Analyze column.
- For each pair, you can also filter the resources simulated by the tasks. When
filtered, the resource will still be simulated but it will not be taken into account
for collision detection.

-
Select the Analysis tab.

In the Simulation section, Collision tolerance specifies the tolerance distance used for collision checking.
Time interval specifies the time span used to compute each clash specification.
Select Compute intersection volumes to compute the intersection volumes when there is a collision.
-
Click Compute clashes to analyze and compute the list of clashes
per selected pair. The computation ignores all wait instructions as it executes the tasks.
The results are computed for each pair of robots and displayed in the Clash results section.

-
Select any red cell in the table marked Collision.
Each robot jumps to the collision position selected, and parts that are in collision are highlighted.

The tooltip for the selected table cell provides the start time and collision time for each motion.

Click Export current pair results to save the results locally in an XLS file.
-
Select the Interlocks mapping tab.

Each interlock found between both robot tasks is listed based on which robot has priority. You can select which robot has priority from the Priority list.

In the Interlock details section, for each pair of robots in the List of pairs list, you can choose to create Local instructions or perform Call tasks.
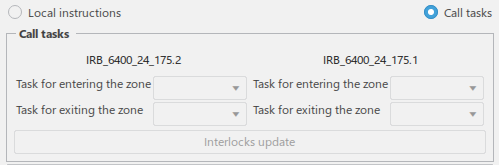
Call tasks options allows you to perform specific call tasks at the beginning and end of the interlocks. The tasks called must already be defined, and must not contain any motions (only logical instructions).
Click Export the interlock to save the results locally in an XLS file.
-
Click Interlocks update to update the interlocks between the
robots with IO signals, wait, and assignment instructions.
All logical elements are created.
