-
From the Sequencing side tab, select the nominal task.
-
Press
Play to play the simulation for the nominal task.
The simulation begins playing, and the Simulation Tools context toolbar appears.
-
From the
Simulation Tools context toolbar, click Pause/resume simulating tasks
 . .
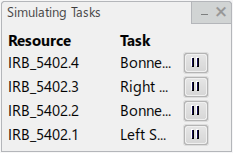
The Simulating Tasks panel appears, and lists all of the resources and their respective tasks that are currently playing.
-
Click Pause Task
 to stop a specific robot task. to stop a specific robot task.
The selected robot stops, as the remaining robots continue.
-
Click Resume Task
 to resume the task for that robot. to resume the task for that robot.
|
