Redefine the Local Axis System Manually
You can redefine the local axis system manually.
- Select a product in the work area.Alternatively, you can click the Local Axis System
 first.Notes:
first.Notes:- If a representation or an element underneath a representation has been previously selected, the selection is made on the parent product.
- If no object is selected, the panel that appears is empty and prompts you to select an object .
-
Click
Local Axis System .
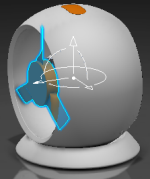
The Local Axis System Redefinition dialog box appears.
The robot is automatically snapped to the original axis system:
-
To modify the local axis position and angle values along X-Y-Z, do either of the following:
- Enter the accurate values in the New Position area of the dialog box.
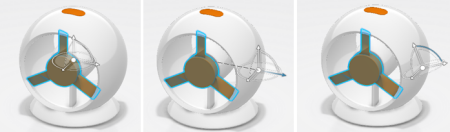
- Use the robot so as to adjust the new axis system by performing rotations and translations.
- Select the Robot circular arcs to modify the Robot orientation.
- Select the Robot axes to modify the location and position of the Robot.
 The new position and angle values are reflected in the dialog box; the local axis system position is dynamically updated in the 3D area and is also identified in the tree (
The new position and angle values are reflected in the dialog box; the local axis system position is dynamically updated in the 3D area and is also identified in the tree ( ).
).