Concepts
Transform Section
You can choose various translation modes used with different robot types. The robot type
and the number of axes depend on the selected Transform option.
It can have 3 or 5 axes which are not imperatively orthogonally to each other.
-
 Activate Transform
Activate Transform
- Toggles Transform options availability.
-
 Local Modification
Local Modification
- Only available for subobject manipulation.
- The robot is oriented locally, that is the movement direction is specified in
each geometry point.
Notes:
- Scaling and rotating is not possible in this mode.
- The axes are not oriented orthogonally to each other.
- Depending on the selected subobject type, two robot types are used:
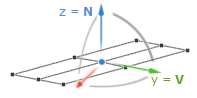
- UVN Orientation
- The UVN oriented robot has three axes and is used
for the manipulation of
-
- Greville Points

- Global Points

- Corner Points

- The axes are oriented as follows:
| Red |
Surface
U direction |
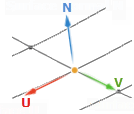
|
| Green |
Surface
V direction |
| Blue |
Surface
N ormal direction |
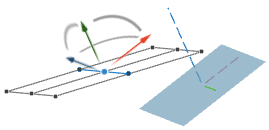
- Mesh Orientation
- The mesh oriented robot has five axes and is used
for the manipulation of Control Points
 . .
- The axes are oriented as follows:
| Red |
Surface
U direction |
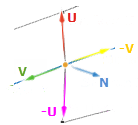
|
| Magenta |
Surface
opposite U direction |
| Green |
Surface
V direction |
| Yellow |
Surface
opposite V direction |
| Blue |
Surface
N ormal direction |
 Global
Modification Global
Modification - The
robot is oriented globally, that is all selected objects and subobjects are moved
along the axes of the robot at the current position. The axes are oriented
orthogonally to each other.
- In this mode, you can choose the robot types:
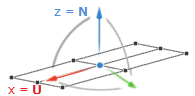
 XYZ Orientation
XYZ Orientation
- Selected objects and subobjects are moved along the x-, y-, or z-axis of the current robot orientation, or rotated around an axis.
 UN Orientation
UN Orientation
-
At
the attachment point of the selection object or subobject, the robot axes
are oriented as follows:
-
| x-axis |
U direction |
|
| y-axis |
Crosswise
to U direction |
| z-axis |
N ormal direction |
 VN Orientation
VN Orientation
- At the attachment point of the
selection object or subobject, the robot axes are oriented as
follows:
-
| x-axis |
Crosswise to
V direction |
|
| y-axis |
V direction |
| z-axis |
Normal direction |
 View Plane Orientation
View Plane Orientation
- The robot z-axis is oriented in normal direction of the view plane and points towards the user out of the screen. It is fixed in the current view plane and not aligned when changing the view.

 View Plane Align Orientation
View Plane Align Orientation
- Like View Plane Orientation
type, but not fixed in the current view. When manipulating the view,
the robot is dynamically aligned to the new current view plane.
 OmniPlane Orientation
OmniPlane Orientation
- The robot z-axis is oriented in normal direction of the current OmniPlane.
-
Translation
- The robot is oriented globally, that is all
selected objects and subobjects are moved along the axes of the robot at the
current position.
 Scaling Scaling - Only available for Global
Modification
.
- The selected objects and subobjects are scaled depending on the selected orientation in xyz or uvn direction. The robot origin is the scaling center.
- The robot shape changes to
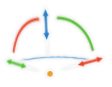
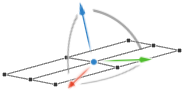
 Rotation Rotation - Only available for Global
Modification
.
- You can rotate the selected entity without
dragging directly a robot axis. The robot behavior depends on the Remote Mode setting in the More
section.
Additional Options (More section)
Click More to display additional Transform options.
Note:
If Geometry is modified using Controls options, the settings of the Transform options are stored with the modification step. If the settings are changed without further geometry modification and an Undo is carried out, the settings used with the modification step are restored. However, if afterwards a Redo is carried out, only the modification undone is restored but not the option settings.Example:
- Select Controls with Dynamic Measurement cleared.
- Modify a surface.
Dynamic Measurement cleared is stored with this step.
- Select Dynamic Measurement.
- Undo the modification.
Dynamic Measurement is cleared.
- Redo the modification. Dynamic Measurement remains cleared.
- Robot Behaviors
-
- Remote Mode
-
- None
- Remote mode is disabled.
- Mouse Buttons
- Depending on the Remote rotation setting in the Transform section, you can translate (Remote Rotation
cleared) or rotate ( Remote Rotation
 selected) the selected entity without dragging directly a robot axis. selected) the selected entity without dragging directly a robot axis.

|
Translation along x axis or rotation around x axis in yz plane |

|
Translation along y axis or rotation around y axis in xz plane |

|
Translation along z axis or rotation around z axis in xy plane |
- Screen zone
- Left-drag moves the entity in direction of the axis closest to
the mouse position.
- Dynamic Axis
- Controls the robot's visibility.
- On: The robot is always visible on the
first selected object.
- Over: The robot is only visible when moving
the cursor over the robot. The origin is always visible and
displayed as small circle.
- Off: Only the robot's origin is visible.
- Size
- Modifies the robot's size.
- Mouse Warp
- Lets you modify the translation ratio between mouse movement and robot movement
on the screen. With factor 1, the point movement corresponds exactly to the cursor
movement (transition ratio 1:1).
- You can set a translation factor between 1 and 10,000 by
- entering a value in the box,
- moving the slider,
- pressing v + click or v + right click to decrease or increase the value in
steps to 1, 10, 100, 1000, and 10000, or
- pressing v + turning the mouse wheel down or up to decrease or increase the
value continuously.
- In the work area, the selected value is displayed.
- Snap
- Snaps to objects and subobjects.
- Increments
-
- Step mode: Selects or clears step mode.
When
selected, you can use  and and  + click, middle-click, or right-click
to move the robot stepwise in x, y, or z positive or negative
direction. + click, middle-click, or right-click
to move the robot stepwise in x, y, or z positive or negative
direction.
- Linear: Specifies the translation step size.
- Angular: Specifies the rotation step size.
- Dynamic Measurement:
Move or rotate the robot to display the numerical distance or angle value in the work area.
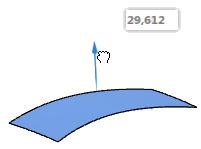

Release the robot to enter a value in the text box.
|


