Problem description
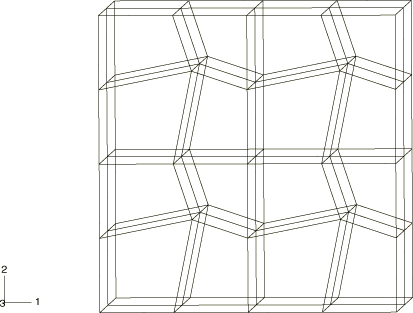
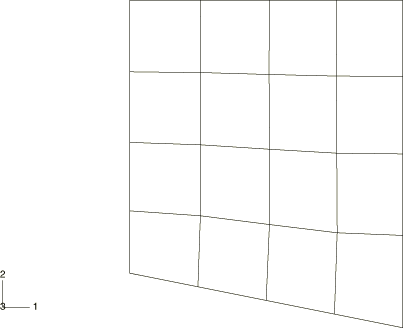
Two-dimensional (plane strain and plane stress) and three-dimensional geometries are considered. For the two-dimensional geometries a square block with an edge length of 4 m is meshed with CPE4R (plane strain) or CPS4R (plane stress) elements, as shown in Figure 1. For the three-dimensional geometry a cube with an edge length of 4 m is meshed with C3D8R elements, as shown in Figure 2. Both geometries are meshed with initially distorted elements.
All three meshes are tested for the following material models: hyperelasticity, hyperelasticity with viscoelasticity, hyperfoam, Hill plasticity, Mises plasticity, Drucker-Prager plasticity, Drucker-Prager cap plasticity, crushable foam plasticity, and porous metal plasticity. The parameters and constants used for each material model can be found in the input files that are included with the Abaqus release.
The loading is similar for all geometries. The first step is run in a pure Lagrangian fashion. A linearly varying displacement field, acting in the negative y-direction, is prescribed on the bottom edge or face of the mesh, as shown in Figure 3. The displacements normal to all the remaining edges/faces are fully constrained. The prescribed displacement is ramped on using a smooth-step amplitude curve to promote a quasi-static response to the loading.
In the second step an adaptive mesh domain is defined for each patch to allow adaptive meshing to occur. The loading and boundary conditions remain unchanged. Adaptive meshing is performed at every increment. At this frequency the mesh distortion is eliminated in a few increments. An accurate advection algorithm ensures that the distribution of solution variables in the patch remains approximately the same before and after adaptive meshing occurs.