Problem description
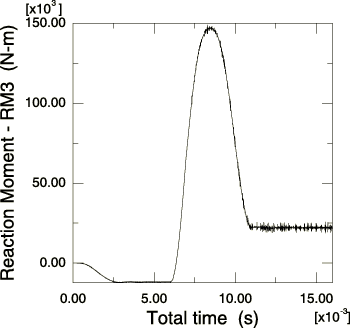
This problem consists of a pre-tensioned elastic belt wrapped 180° around a 1 m diameter rigid drum. The belt is fixed at one end and has a constant force of 50000 N applied at the other end. The interaction between the belt and the drum is governed by a Coulomb friction law with a coefficient of friction 0.2. The objective of the analysis is to predict the steady-state resisting moment as the drum is turned. This moment corresponds to the difference in forces at the two belt ends times the moment arm of 0.5 m. The difference in force is maximized at the steady-state slip condition, which can be simulated by prescribing a rotation of the drum.
The analysis is run in two steps: in the first step the belt is pre-tensioned while keeping the drum fixed, and in the second step the drum is accelerated to a prescribed angular velocity. The pre-tensioning force and the prescribed angular velocity are ramped up using a smooth-step amplitude curve. This amplitude definition provides a smooth loading rate, which is desirable in quasi-static or steady-state simulations. Mass proportional damping is used to further reduce oscillations in the response.