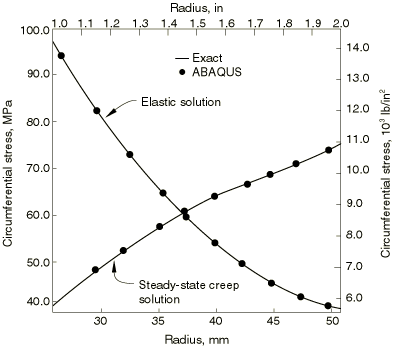
The cylinder is subjected to a rapidly applied internal pressure of 60 MPa
(8700 lb/in2) that is held constant for a long period of time, so
that the steady-state creep conditions are reached.
The initial application of the pressure is assumed to occur so quickly that
it involves purely elastic response, which is obtained by using the static
procedure. The creep response is then developed in a second step, using the
quasi-static procedure. A response of 180,000 seconds (50 hours) is requested,
which is sufficient to reach steady-state conditions. During the quasi-static
step a tolerance is required to control the time increment choice and, hence,
the accuracy of the transient creep solution. In this case we assume that
moderate accuracy is required. Errors in stress of about 0.7 MPa (100
lb/in2) will make a small difference to the creep strain added
within an increment. Converting this stress error to a strain error by dividing
it by the elastic modulus gives a tolerance of 5 × 10−6. Higher
accuracy in the integration of the creep constitutive model can be obtained by
reducing this tolerance, at the expense of using more time increments.
Alternately, using a large tolerance value will allow
Abaqus
to use the largest possible time increments, so that low accuracy will result
during the transient, but the steady-state solution will be reached at minimum
cost. Thus, if the steady-state solution is the only part of the solution of
interest, it is effective to set the tolerance to a large number.
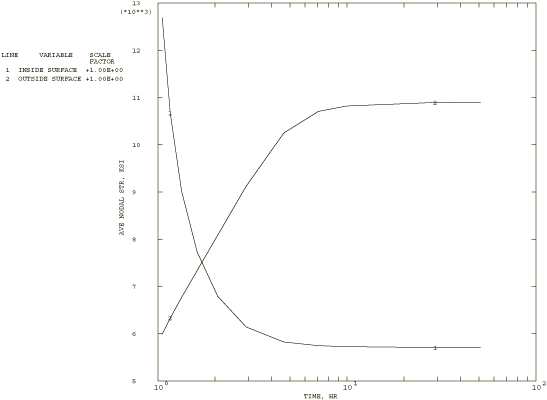
With the tolerance specified in the quasi-static procedure,
Abaqus
uses automatic time incrementation. The scheme is rather simple and aims at
increasing the time increments gradually as the solution progresses toward
steady state. In a small-displacement case such as this, explicit integration
of the creep constitutive model is usually efficient because the method is
inexpensive per time increment (since no new stiffness matrix needs to be
formed and solved), and its stability limit is usually quite large compared to
times of interest in the solution. The automatic time stepping scheme includes
an internal calculation of the stability limit, and the time increment is
controlled to remain within this limit. If this is too restrictive—if it
results in a sequence of time increments that are all much smaller than the
remaining part of the time period requested on the data line associated with
the quasi-static procedure (10 successive increments where the time increment
is less than 2% of the remaining time period)—Abaqus
automatically switches to an implicit time integration scheme that is
unconditionally stable. The only limit at all on the time increment selection
is then accuracy as specified by the tolerance. This switch to implicit
integration can be suppressed by the user in the quasi-static procedure. In
this example the switch to implicit integration occurs at increment 44, after
27,108 seconds (7.53 hours) of creep. This allows
Abaqus
to choose large time increments (up to 39,600 seconds, or 11 hours) toward the
end of the solution.