This example illustrates fully plastic
J-integral evaluation using deformation theory plasticity,
as is used in the “engineering fracture mechanics” methodology developed by
Kumar, et al. (1981).
In this type of analysis elastic and fully plastic
J-integral values are first obtained for the geometry of
concern and are then combined, using a simple formula, to obtain approximate
values of the J-integral at all load levels up to the
limit load. The method offers a simple technique for flaw evaluation, provided
the fully plastic J-integral values are readily available.
Abaqus
contains a Ramberg-Osgood deformation plasticity theory model for this purpose.
This example demonstrates the standard method provided in
Abaqus
to obtain such fully plastic results.
In many cases the user may prefer to evaluate the
J-integral at each load level using incremental or
deformation theory, thus providing a direct computation of the
J-integral value at each load level. The “engineering
fracture mechanics” approach used in this example is generally used when
tabulations of values are required for standard geometries, loadings, and
materials.
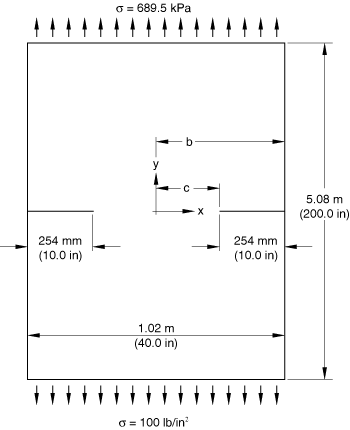
Problem description
The example uses the same double-edged notch specimen geometry used in
Contour integral evaluation: two-dimensional case
(where linear elastic J-integral evaluation is
illustrated), except that the length of the specimen has been extended somewhat
to ensure that the results are effective for an infinitely long plate. Plane
stress and plane strain cases are both analyzed. Results for these cases are
available in Kumar, et al. (1981), so that the example provides verification of
the fully plastic J-integral results.
The geometry is shown in
Figure 1.
The specimen half-length has been extended to 2.54 m (100 in) to ensure that
the far-field tension load is applied at a sufficient distance from the crack
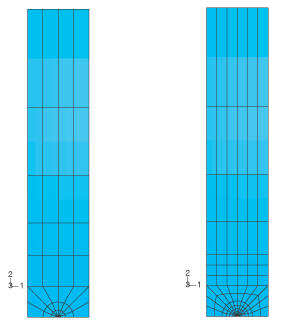
tip. The meshes for the 1/4 model are shown in
Figure 2.
Both a coarse mesh and a fine mesh are used. The fine mesh is similar to the
coarse mesh, but with more elements. This mesh is used only in the plane strain
case, because the incompressibility assumption in the material model makes that
case more difficult. Shih and Needleman (1984) discuss this issue and point out
that it is essential that the mesh should be able to model the fully plastic
flow field accurately. For this reason mesh convergence studies are essential
in such applications—see the discussion in the “Results” section below.
Second-order elements are used. For the plane stress case the element type is CPS8R (the reduced integration, 8-node quadrilateral element). For the
plane strain case element type CPE8RH is used; this element is a “hybrid” (mixed) formulation element
and is used in this case because the material behavior is fully incompressible
at the limit load and the mixed method can handle the incompressibility
constraint. Acceptable results can also be obtained by using element type CPE8R, since the use of reduced integration avoids excessive constraint
with incompressible response.
Material
The material model is the deformation theory, Ramberg-Osgood model provided
in
Abaqus
for such applications. This plasticity model is nonlinear at all stress levels,
although the initial response up to the reference stress and strain values is
almost linear. Various hardening exponents are of practical interest, the most
commonly needed values being from 3 to 10. For this reason several different
values are studied in this example.
Loading
The load is far-field tension applied to the top edge of the model. This is
accomplished by applying negative pressure to the edges of the elements along
the top of the model.
Solution development
The deformation theory solutions are not path dependent (the deformation
theory plasticity model used here is entirely equivalent to a nonlinear
elasticity model), so any technique that will provide the fully plastic
solution in a numerically efficient manner is satisfactory. The most effective
approach in
Abaqus
for this purpose is usually the standard technique of incrementation and
iteration, gradually increasing the load magnitude until the fully plastic
solution is obtained. A general static analysis is done. Simultaneously, a
region is monitored to become fully plastic, thus monitoring the progress of
such a deformation theory solution. In this problem a set named
Monitor is created that contains all of the
elements in the focused part of the mesh and the first layer of elements above
that region.
Abaqus
will stop incrementing the load when all points in all elements in the
specified set Monitor are in the fully plastic
range (defined by the equivalent plastic strain being 10 times the offset yield
strain), at which time the desired solution has been obtained.
Automatic incrementation is used, so the only control value that is needed
is the suggested initial increment size. This can be estimated from knowledge
of the limit load for the problem (available in Kumar, et al., 1981). The
initial increment is suggested as 40% of the limit load value. This choice is
not very critical in this case since the automatic incrementation algorithm
will quickly find a suitable increment size, provided the suggestion is not
grossly wrong.
Results and discussion
Kumar, et al. (1981) provide tables of values of the nondimensional
parameter ,
which defines the fully plastic J-integral for the
geometry as
where ,
,
and n are the material parameters in the Ramberg-Osgood
model; /E;
c is the half-width of the remaining ligament;
b is the half-width of the specimen;
P is the total load per unit thickness on the specimen;
and
is the limit load per unit thickness. For plane strain
and for plane stress
Table 1
and
Table 2
summarize the values of
obtained in this example (calculated from the J-integral
values provided in the
Abaqus
output, using the equation above) and compare them to the values published by
Kumar, et al. (1981). The plane stress case causes little difficulty, and the
differences between J-integral values calculated on
different contours are small, indicating that the results are fairly accurate.
The agreement between these results and the values published by Kumar, et al.
(1981) is quite good. In the plane strain case
Table 2
shows considerable scatter in the results obtained with the coarse mesh,
indicating inaccuracy. The finer mesh results show only a small scatter between
the different contours (six contours are available in this mesh, and
Table 2
shows the minimum and maximum values obtained). These finer mesh values are all
close to the values obtained with the coarse mesh. These observations suggest
that the finer mesh results are reliable. However, they do not agree closely
with those tabulated by Kumar, et al. (1981). It has been established that some
of the plane strain results presented by Kumar, et al. (1981) are inaccurate;
Shih and Needleman (1984) reanalyzed the single-edge cracked specimen for this
reason. They point out the need for fine, carefully designed meshes to obtain
accurate and reliable J-integral values, especially in
such cases where incompressibility constrains the deformation. They also
discuss consistency checks. One of these is the comparison of numerical values
of the J-integral obtained from different contours around
the crack tip. The J-integral should be path independent;
therefore, any variation in J-integral values calculated
on different contours implies inaccuracy.
Table 2
shows the range of J-integral values obtained in this
example; as mentioned above, there is very little scatter in the values
calculated with the fine mesh, so they satisfy this consistency check. The
other consistency check discussed by Shih and Needleman (1984) requires the
evaluation of J-integral values at different crack depths
so that the slope of the J-versus-crack-depth variation
can be calculated. In this example only one value of crack depth has been
investigated, so this check cannot be applied. The discrepancy between the
values reported here and those tabulated by Kumar, et al. (1981) must remain
unexplained until further analysis, including the second consistency check, is
done.
Submodeling of the crack tip
In
Contour integral evaluation: two-dimensional case
the submodeling capability is used to obtain more accurate near-tip stress
fields in the linear elastic problem. In this example the submodeling
capability is used to analyze the crack-tip region when the material is
elastic-plastic. When small-scale yielding conditions exist, the far-field
elastic region is not affected by the plastic zone around the crack tip. This
will be true if the plastic zone size is less than about 10% of any
characteristic length in the problem. The crack length serves as the
characteristic length in this case. The loads in the problem are chosen so that
the plastic zone is sufficiently small.
The problem is first solved with a relatively coarse mesh, as an elastic
problem. The boundary of the submodel is chosen sufficiently far away from the
crack tip so that the displacements on the boundary will not be affected by the
plastic zone. The coarse mesh used is shown in
Figure 2
(left). Plane strain conditions are modeled with CPE8RH elements, and a focused mesh is used (see
jintegralplastic_global.inp).
The value of the far-field loading for the global problem is chosen so that the
small-scale yielding conditions at the crack-tip field are met in the
elastic-plastic material case. A region of 508 mm (20 in) by 254 mm (10 in) is
used for the submodel. The driven boundary is sufficiently far from the crack
tip so the stress field near this boundary is not influenced by the plastic
zone. The submodel has six rings of CPE8RH elements around the crack tip. The elastic-perfectly plastic
material properties can be found in the corresponding files for the submodel.
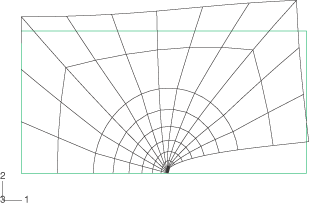
Figure 3
shows the geometry for the double-edged notch submodel and its deformed shape
with a magnification factor of 169.
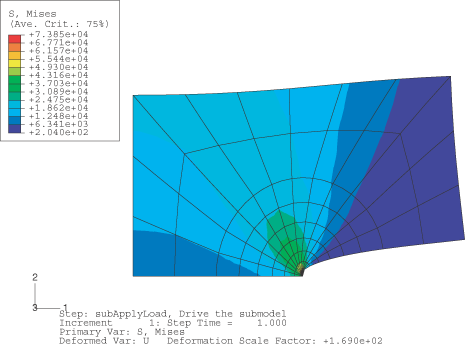
The J-integral values for the submodel should match the
J-values for the global elastic mesh provided small-scale
yielding conditions are met. Results are given in
Table 3
for an analysis in which the plastic zone is entirely contained within the
first two rings of elements surrounding the crack tip. The corresponding Mises
stress contours are shown in
Figure 4.
Submodeling could equally be used with a Ramberg-Osgood deformation
plasticity model.
Typical input data for one case (plane stress, n = 5).
The other coarse mesh cases reported in the tables are available by changing
the element type for plane strain and/or by changing the exponent
n in the material definition.
Submodel data for an elastic-perfectly plastic material, using the
stress-based submodeling technique. The file jintegralplastic_global.inp
contains the global model used.
Coarse mesh in plane strain, global model used for submodeling.
References
Kumar, V., M. D. German, and C. F. Shih, “An
Engineering Approach for Elastic-Plastic Fracture
Analysis,” Report NP–1931, Electric Power
Research Institute, Palo Alto,
California, 1981.
Shih, C.F., and A. Needleman, “Fully
Plastic Crack Problems,” Parts I and II, ASME
Journal of Applied
Mechanics, vol. 51, pp. 48–64, 1984.
Tables
Table 1. Fully plastic results for double-edged cracked plate in plane stress.
values for double-edged cracked plate in tension;
(crack depth/half ligament) = 0.5.
Hardening exponent
Abaqus
Kumar, et al. (1981)
3
1.37–1.38
1.38
5
1.17–1.18
1.17
7
1.01
1.01
9
0.90
not given
10
0.85
0.845
Table 2. Fully plastic results for double-edged cracked plate in plane strain.
values for double-edged cracked plate in tension;
(crack depth/half ligament) = 0.5.
Hardening exponent
Abaqus
Kumar, et al. (1981)
Coarse mesh
Finer mesh
3
2.55–2.59
2.55–2.58
2.48
5
2.59–2.62
2.58–2.59
2.43
7
2.55–2.58
2.55–2.56
2.32
10
2.39–2.43
2.46–2.47
2.12
Table 3. J-integral comparison for global and submodel
analyses.
Contour
Global elastic analysis
Submodel elastic-plastic
analysis
1
294.783
281.524
2
293.176
284.562
3
293.177
288.742
4
292.966
288.782
5
–
288.797
6
–
288.790
Figures
Figure 1. Geometry for double-edged notch specimen. Figure 2. Coarse (left) and finer (right) meshes for double-edged notch
specimen. Figure 3. Geometry for double-edged notch submodel and its deformed shape shown
with magnification factor of 169. Figure 4. Contour of the Mises stress around the crack tip of the
elastic-plastic submodel.