Problem description
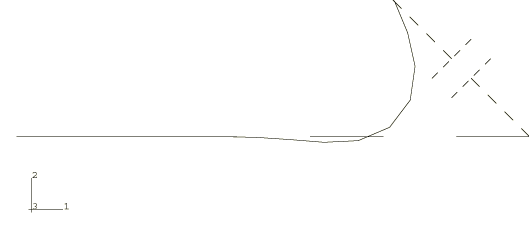
A pipeline 228.6 m (750 ft) long, with outer diameter 254 mm (10 in) and wall thickness 25.4 mm (1 in) is initially straight and stress-free and is assumed to lie on a hard seafloor. One end of the pipeline is attached through a weightless cable to a fixed point, A, which is offset from the pipeline end as shown in Figure 1. The cable is shortened gradually to simulate a winching process during which the end of the pipeline is pulled toward A. The anisotropic seabed friction capability discussed above is used to model the pipe-seabed interaction; the transverse friction coefficient is 1.0 and the tangential friction coefficient is 0.6. The motion is assumed to be in the plane of the model only. Fifteen hybrid beam elements (type B31H) are used to model the pipe. The hybrid beam elements are specifically formulated for modeling very slender beams and are generally recommended for this type of pipeline modeling.