Verification for this problem is provided by comparing the values of
significant problem variables with the analytical solution. The numerical
solutions are based on the default time incrementation except where noted.
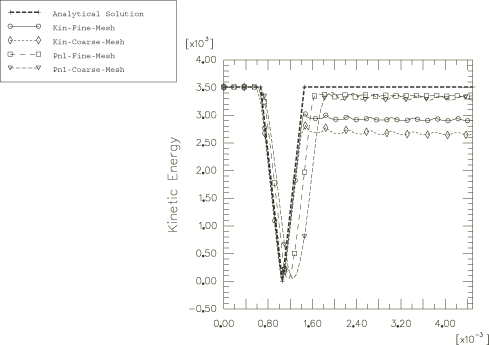
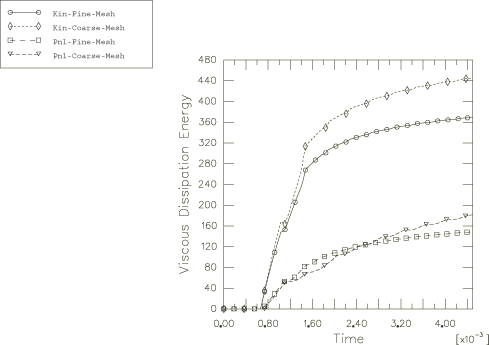
Plots of kinetic energy are shown in
Figure 4.
Four stages of the solution (pre-impact, truss compression, truss re-expansion,
and postimpact) are apparent in this plot. When penalty contact is used, the
latter stages are delayed and changes in the slope at the transitions between
these stages are smoothed. The onset of truss compression is advanced in time
by one increment with kinematic contact. In each of the numerical solutions the
kinetic energy is not entirely recovered upon rebound because of the numerical
dissipation of energy and finite discretization. For the penalty contact
solutions the dissipation of energy is primarily caused by small amounts of
bulk viscosity (included by default in the
Abaqus/Explicit
element formulations) and viscous contact damping (included by default for
penalty contact). For the kinematic contact solutions both the bulk viscosity
and the contact algorithm itself contribute significantly to the loss of
energy. The kinematic contact algorithm dissipates the kinetic energy of the
contact node upon impact, whereas the penalty contact algorithm converts the
kinetic energy of the contact node into energy stored in the stretched penalty
spring. These energy transfer considerations will be discussed further in the
following paragraphs.
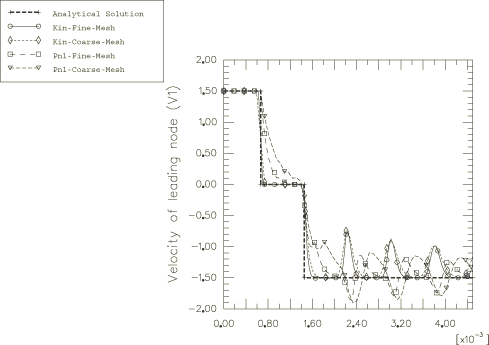
Velocity histories of the leading truss node (contact node) are plotted in
Figure 5.
The kinematic contact solutions for velocity closely match the analytical
solution during pre-impact and during impact. The impact stage is less distinct
in the velocity plots for penalty contact because some penetration occurs. All
numerical solutions for the postimpact velocity show some oscillations that are
not part of the analytical solution. These oscillations are associated with the
energy dissipation and finite discretization. In the kinematic contact
solutions a stress wave continues to pass through the truss during the
postimpact phase, which periodically reduces the magnitude of the nodal
velocity. This wave becomes narrower as the mesh is refined. With penalty
contact a postimpact stress wave persists, which causes the postimpact nodal
velocity to oscillate about approximately −1.5 m/s, where the negative velocity
indicates movement in the negative x-direction. In all
numerical solutions these velocity oscillations become more diffuse over time
as a result of the bulk viscosity damping.
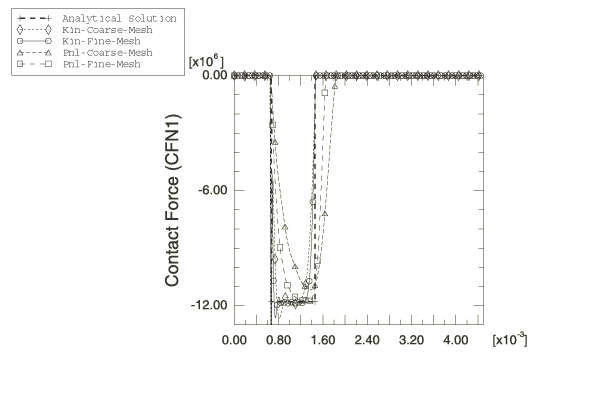
Contact force history solutions are plotted in
Figure 6.
For the kinematic contact tests
Abaqus/Explicit
gives very good estimates of the peak contact force and captures the steps in
the contact force history quite well. However, it will be shown later that the
contact force history with kinematic contact depends on the size of the time
increment used in the analysis. The penalty contact force solutions produce
reasonable estimates of the peak contact force, but because of the inherent
numerical softening of the penalty method, extreme mesh refinement is needed to
observe sudden jumps in contact force.
Figure 7
contains plots of external work. The external work remains zero in the
analytical solution. Some external work associated with contact forces, which
are treated as external forces in
Abaqus/Explicit,
can be observed in the numerical solutions. With penalty contact the external
work accounts for the energy stored in the penalty springs during contact
penetration and the energy dissipated by viscous contact damping. After the
rebound the external work returns to a constant negative value as the penalty
spring energy is recovered; the negative value corresponds to the amount of
dissipation due to viscous contact damping. With kinematic contact a contact
force first occurs in the increment just prior to the actual impact when a gap
is still present; thus, penetration does not occur in the next increment.
Therefore, the kinematic contact force does some work when contact is first
established. This work corresponds to the kinetic energy of the contact node,
and this energy is dissipated by the contact algorithm and is not recovered
upon the rebound.
The energy dissipation caused by the bulk viscosity is plotted in
Figure 8.
This dissipation is greater with kinematic contact than with penalty contact
because impacts in the kinematic contact formulation are not softened. Greater
shock to the elements and increased element damping occur. Energy continues to
dissipate after the rebound as a result of damping of stress waves that persist
in the truss after the rebound.
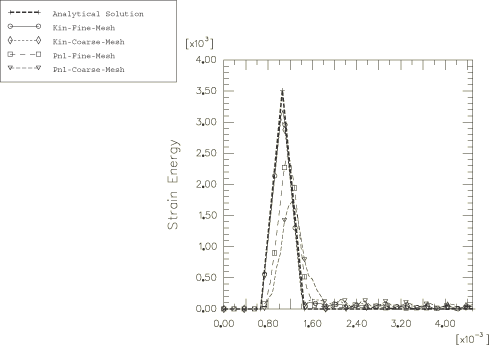
Plots of strain energy are shown in
Figure 9.
The energy stored in penalty springs is not included in the strain energy
reported by
Abaqus/Explicit,
because the contact forces are treated as external forces. Instead, the energy
stored in penalty springs appears as negative external work, as mentioned
previously. Some strain energy remains after the rebound in the numerical
solutions, which is related to stress waves that remain in the truss.
An undesirable characteristic of the kinematic contact algorithm is that the
initial impact force predicted for a given mesh over the contact region depends
on the size of the time increment. The contact force results shown in
Figure 10
are based on analyses in which the time increment was scaled by 0.25. This
scaling simulates the presence of a small element in the model that would
control the time increment size. The kinematic contact algorithm will
overestimate impact forces if the time increment is significantly lower than
the stable time increments of elements near the contact region. Reducing the
time increment causes the contact force to increase, because the approach speed
of the leading node must be resolved over a shorter time interval to avoid
penetration upon impact.
Figure 10
also shows that the time increment size has negligible influence on the contact
force solution if the penalty contact formulation is used. Other solution
variables discussed in this example have minimal dependence on the size of the
time increment for both types of contact constraint methods.
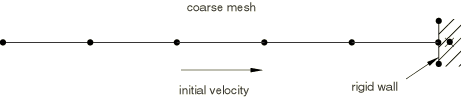
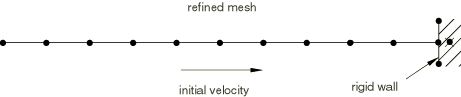
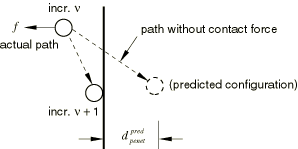
To better understand these results, consider a single secondary node impacting a fixed rigid
wall. Figure 11 and Figure 12 show such a contact secondary node as a circle in increment
. Friction will not be considered.
In the kinematic contact formulation
Abaqus/Explicit
calculates a predicted penetration
(see
Figure 11).
This predicted penetration is equal to the movement of the node if no contact
condition is enforced.
Abaqus/Explicit
then calculates the contact force, ,
in the normal direction according to
and applies this force in the current increment. The contact force is
applied before the contact is actually established. In the next increment,
+1,
the node contacts the surface of the opposing body without penetration (see
Figure 11)
and the loss of kinetic energy occurs. Although not shown in
Figure 11,
a contact force will also occur in increment +1
in the case of kinematic contact to eliminate the remainder of the velocity
component normal to the surface.
Figure 12
shows the schematic for the penalty contact formulation. The contact force is
first applied in increment +1,
and some penetration of the node into the opposing surface occurs. The contact
force
is calculated according to
where k is the penalty stiffness calculated by
Abaqus/Explicit,
c is the viscous damping coefficient calculated from the
default contact damping setting, and
is the penetration velocity. The penalty stiffness term can be envisioned
physically as a spring attached between the penetrating node and the surface
being penetrated. The energy is stored in this spring and is released as the
node penetration reverses and decreases to zero (see
Figure 7).
The small amount of kinetic energy lost (see
Figure 4)
is the result of viscous effects of the elements, viscous contact damping, and
strain energy remaining in the truss after separation (see
Figure 9).
As the mesh is refined, both formulations tend toward the analytical solution.