A surface-based coupling constraint couples the motion of a collection of nodes on a
surface to the motion of a reference node, with or without imposing rigidity among the
collection of nodes for "kinematic" or "distributing" types, respectively.
In addition, the surface-based coupling constraint:
is of type kinematic when the group of nodes is coupled to the rigid body motion defined
by the reference node;
is of type distributing when the group of nodes can be constrained to the rigid body
motion defined by a reference node in an average sense by allowing control over the
transmission of forces through weight factors specified at the coupling nodes;
automatically selects the coupling nodes located on a surface lying within a region of
influence;
can be used with two- or three-dimensional stress/displacement elements; and
can be used in geometrically linear and nonlinear analysis.
The surface-based coupling constraint in
Abaqus
provides coupling between a reference node and a group of nodes referred to as
the “coupling nodes.” This option provides the same functionality as the
kinematic coupling constraint and the distributing coupling elements (DCOUP2D, DCOUP3D) in
Abaqus/Standard with
a surface-based user interface. The coupling nodes are selected automatically
by specifying a surface and an optional influence region. The procedure used to
define the coupling nodes is discussed below.
For a distributing coupling constraint, the distributing weight factors are
calculated automatically if the surface is an element-based surface. In such a
case the weight factors are based on the tributary area at each coupling node,
except for a surface along a shell edge, where the weight factors are based on
the tributary edge length. Furthermore, the distributing weight factors can be
modified using one of several weighting methods, which allow the forces
transferred to the coupling nodes to vary inversely with the radial distance
from the reference node.
Typical Applications
The coupling constraint is useful when a group of coupling nodes is
constrained to the rigid body motion of a single node. The coupling constraint
can be employed effectively in the following applications:
To apply loads or boundary conditions to a model.
Figure 1
illustrates the use of a kinematic coupling constraint to prescribe a twisting
motion to a model without constraining the radial motion.
Figure 1. Kinematic coupling constraint.
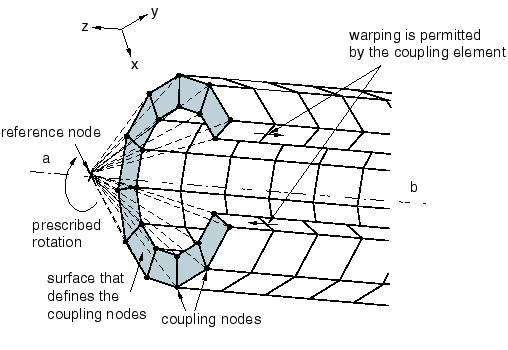
Figure 2
illustrates a distributing coupling constraint used to prescribe a displacement
and rotation condition on a boundary where relative motion between the nodes on
the boundary is required. In this example a twist is prescribed at the end of
the structure that is expected to warp and/or deform within the end surface.
Figure 2. Distributing coupling constraint.
To distribute loads on a model, where the load distribution can be
described with a moment-of-inertia expression. Examples of such cases include
the classic bolt-pattern and weld-pattern distribution expressions.
To apply dimensionality transitions between continuum and structural
elements. For example, a distributing coupling allows flexible coupling between
structural and solid elements.
To model end conditions. For example, modeling a rigid end plate or
modeling plane sections of a solid to remain planar can be done easily with a
kinematic coupling definition.
To simplify modeling of complex constraints. In a kinematic coupling
definition the degrees of freedom that participate in the constraint may be
selected individually in a local coordinate system.
To model interactions with other constraints, such as connector
elements. For example, a hinged part may be modeled more realistically by two
distributing coupling definitions, whose reference nodes are connected by a
hinge connector element. The load transfer then occurs between two “clouds” of
nodes, rather than between two single nodes.
Substructure analysis of a one-piston engine model
illustrates this use of connector elements in conjunction with coupling
constraints to model a one-piston engine.
Defining the Coupling Constraint
Defining a coupling constraint requires the specification of the
reference node (also called the constraint control point), the coupling nodes, and the
constraint type. The coupling constraint associates the reference node with the coupling
nodes. A name must be assigned to the constraint. A node number or node set name may be specified for the reference node. When the
reference node set contains multiple nodes, you should specify a radius of influence to
avoid overconstraint issues. The reference node for a kinematic coupling constraint has both
translational and rotational degrees of freedom. The surface on which the coupling nodes are
located can be node-based; element-based; or, in Abaqus/Explicit, a combination of both surface types. You can specify an optional radius of influence to
limit the coupling nodes to a specific region on the surface. Details on how coupling nodes
are defined by specifying an influence region are discussed below.
The constraint type can be either kinematic or distributing, as discussed
below.
By default, coupling nodes belonging to the entire surface are selected for
the coupling definition. You can limit the coupling nodes to lie within a
spherical region centered about the reference node by defining a radius of
influence.
The procedure by which coupling nodes are selected for the constraint
definition depends on the surface type:
For a node-based surface, all the nodes defined by the surface
definition that fall within the influence region are selected for the coupling
definitions.
For an element-based surface, the surface facets that are either fully
or partially inscribed by the influence region are determined. All nodes
belonging to these facets, whether or not these nodes fall within the influence
region, are selected for the coupling nodes. When the influence radius is less
than the distance to the closest coupling node,
Abaqus
selects all nodes belonging to the closest facet. If the projection of the
reference node on the surface falls on an edge or a vertex of multiple facets,
all nodes belonging to these facets adjoining the edge or vertex are included
in the coupling definition. In the case where the influence radius is less than
the distance to the closest coupling node, adjacent surface faces must have
consistent normal directions; otherwise,
Abaqus
issues an error message.
A distributing coupling constraint must include at least two coupling
nodes. If fewer than two coupling nodes are found,
Abaqus
issues an error message during input file preprocessing.
Kinematic coupling constrains the motion of the coupling nodes to the rigid
body motion of the reference node. The constraint can be applied to
user-specified degrees of freedom at the coupling nodes with respect to the
global or a local coordinate system. Only required degrees of freedoms are
activated at the reference node. If no displacement degree of freedom is
constrained, the displacement degrees of freedom at the reference node may not
be activated.
Kinematic constraints are imposed by eliminating degrees of freedom at the
coupling nodes. In
Abaqus/Standard
once any combination of displacement degrees of freedom at a coupling node is
constrained, additional displacement constraints—such as
MPCs, boundary conditions, or other kinematic
coupling definitions—cannot be applied to any coupling node involved in a
kinematic coupling constraint. The same limitation applies for rotational
degrees of freedom. This restriction does not apply in
Abaqus/Explicit.
See
About Kinematic Constraints
for more information.
Input File Usage
Use both of the
following options to define a kinematic coupling constraint:
Translational degrees of freedom are constrained by eliminating the
specified degrees of freedom at the coupling nodes. When all translational
degrees of freedom are specified, the coupling nodes follow the rigid body
motion of the reference node.
Rotational Degrees of Freedom
Rotational degrees of freedom are constrained by eliminating the specified
degrees of freedom at the coupling nodes.
All combinations of selected rotational degrees of freedom result in
rotational behavior identical to existing MPC
types:
Selection of three rotational degrees of freedom along with three
displacement degrees of freedom is equivalent to
MPC type BEAM.
Selection of two rotational degrees of freedom is equivalent to
MPC type REVOLUTE in
Abaqus/Standard.
Selection of one rotational degree of freedom is equivalent to
MPC type UNIVERSAL in
Abaqus/Standard.
In
Abaqus/Standard
internal nodes are created by the kinematic coupling to enforce the constraints
that are equivalent to MPC types REVOLUTE and UNIVERSAL. These nodes have the same degrees of freedom as the additional nodes
used in these MPC types and are included in
the residual check for nonlinear analysis.
Specifying a Local Coordinate System
The kinematic coupling constraint can be specified with respect to a local
coordinate system instead of the global coordinate system (see
Orientations).
Figure 1
illustrates the use of a local coordinate system to constrain all but the
radial translation degrees of freedom of the coupling nodes to the reference
node. In this example a local cylindrical coordinate system is defined that has
its axis coincident with the structure's axis. The coupling node constraints
are then specified in this local coordinate system.
In geometrically nonlinear analysis steps the coordinate system in which the
constrained degrees of freedom are specified will rotate with the reference
node regardless of whether the constrained degrees of freedom are specified in
the global coordinate system or in a local coordinate system.
Thermal Expansion of a Kinematic Coupling
In
Abaqus/Standard
a kinematic coupling can experience expansion due to a temperature increase.
Each coupled node expands along the line that joins the node to the reference
node. The magnitude of the expansion depends on the distance of the coupled
node from the reference node. The temperature change for computing the
expansion is the average of the temperature change at the node and the
temperature change at the reference node. The temperature change at any node is
the difference between the initial temperature of the node and the current
temperature of the node. You must provide the value of the thermal expansion
coefficient so that
Abaqus/Standard
can compute the expansion. Thermal expansion can be used only when temperature
is a field variable.
Distributing coupling constrains translation and rotation of the reference node to the average
motion of the coupling cloud nodes. The cloud nodes will follow the motion of the reference
node in an average sense, but, unlike kinematic coupling, deformation can occur among cloud
nodes.
The rotational coupling constraint enforces that the rotation of the reference node equals
an average rotation measure of the cloud nodes. In Abaqus/Standard this averaging considers translations and rotations (if rotational degrees of freedom are
present) of the cloud nodes by default. Typically, this averaging heavily weights the
average "swirling" of the cloud due to coupling node translations, with coupling node
rotations having a small influence. Coupling node rotations have a greater effect on the
rotational constraint if the cloud nodes are approximately colinear. The rotational coupling
constraint for Abaqus/Explicit only considers the average swirling of coupling node translations.
The translational coupling constraint is such that translation of the weighted center of
the cloud corresponds to the average translation of the cloud nodes. By default, the
reference node translation follows the weighted center translation plus the effect of
rotation of a rigid arm from the weighted center to the reference node. This rigid-arm
rotation corresponds to the reference node rotation. Optionally, cloud node rotational
degrees of freedom can participate in an additional offset term for the translational
coupling constraint such that the reference node remains close to a shell surface during
bending.
Forces and moments acting on the reference node are typically distributed as a nodal force
distribution among cloud nodes, plus (often small) moments acting at any cloud nodes whose
rotations influence translational or rotational constraints. The coupling constraints
distribute loads such that the resultants of forces and moments at the cloud nodes are
equivalent to the forces and moments at the reference node. For cases of more than a few
cloud nodes, the distribution of forces/moments is not determined by equilibrium alone, and
distributing weight factors are used to define the force distribution.
Neglecting Cloud Rotations in Rotational Coupling Constraints
In Abaqus/Standard you can optionally neglect cloud node rotational degrees of freedom in rotational
coupling constraints. In Abaqus/Explicit they are always neglected. In this case the rotation of the reference node matches the
average “swirling” of the cloud associated with cloud node translations.
If cloud rotations do not participate in the rotational coupling constraint, moments at
the reference node are transmitted as a pure force distribution among the cloud nodes.
Therefore, when the cloud node arrangement is colinear, the constraint is not capable of
transmitting all components of a moment at the reference node. Specifically, the moment
component that is parallel to the colinear coupling node arrangement is not transmitted.
When this case arises, Abaqus issues a warning message that identifies the axis about which the element will not
transmit a moment.
Cloud node rotations can optionally be considered in translational coupling constraints
such that the reference node remains near a shell surface as it bends. For this coupling
method to be active, all rotation degrees of freedom at all coupling nodes must be active
(as is the case when the constraint is applied to a shell surface) and the constraints
must be specified in all degrees of freedom (the default). In addition, for the constraint
to be meaningful, the local (or global) z-axis used in the constraint
should be such that it is parallel to the average normal direction of the constrained
surface.
The translational constraint enforces a rigid beam connection between the reference node
and a moving point that remains in the vicinity of the constrained surface at all times.
The location of this moving point is determined by the approximate current curvature of
the surface, the current location of the weighted center of the coupling nodes, and the
z-axis used in the constraint. This choice avoids unrealistic
contact interactions if multiple distributed coupling constraints are used to fasten pairs
of shell surfaces (see Breakable Bonds).
Use of this option is independent of whether or not cloud node rotations influence
rotational coupling constraints.
Releasing Components of the Rotational Coupling Constraint
You can optionally specify which degrees of freedom of the coupling constraint to
constrain. Only rotational components can be released. All available translational degrees
of freedom at the reference node are always coupled to the average translation of the
coupling nodes and must be included in the degrees of freedom to constrain. One rotational
constraint component can be released in a two-dimensional analysis. One, two, or three
rotational constraint components can be released in a three-dimensional analysis. You can
specify the rotational constraint directions in the global coordinate system or in a local
coordinate system.
In a three-dimensional Abaqus/Standard analysis, if all three rotational constraints are released by constraining only degrees
of freedom 1 through 3, only translation degrees of freedom are activated on the reference
node. If only one or two rotation degrees of freedom are released, all three rotation
degrees of freedom are activated at the reference node. In this case you must ensure that
proper constraints have been placed on the unconstrained rotation degrees of freedom to
avoid numerical singularities. Most often this is accomplished by using boundary
conditions or by attaching the reference node to an element such as a beam or shell that
provides rotational stiffness to the unconstrained rotational degrees of freedom.
In Abaqus/Explicit releasing one or more of the rotational constraints may lead to significant
computational performance degradation. This is also the case when other constraints
intersect the cloud of coupling nodes. In these cases, the degradation in performance is
particularly noticeable when a large number of such distributed couplings are present in
the model or when the size of the constrained “cloud” is large. Therefore, when the
modeling conditions mentioned above are encountered, the size of the coupling nodes cloud
is limited to 1000.
The following modeling technique can be used to alleviate rotational constraint issues:
constrain all rotations in the distributed coupling and use an appropriate connector
element at the reference node (such as
REVOLUTE,
HINGE,
CARDAN, or
BUSHING) to model released moments at
the coupling's reference node. This technique also has the advantage of being able to
specify finite compliance such as elasticity, plasticity, or damage in the “released”
rotational component.
In geometrically nonlinear analysis steps the coordinate system of the degrees of freedom
that define the rotational constraint release rotates with the reference node regardless
of whether the global coordinate system or a local coordinate system is used.
If no degrees of freedom are specified, all available degrees of freedom are
coupled. If you specify one or more rotation degrees of freedom but not all available
translation degrees of freedom, Abaqus issues a warning message and adds all available translation degrees of freedom to the
constraint.
For example, the following coupling constraint is used to constrain degrees of
freedom 1–5 on the reference node 1000 to the average translation and rotation of
surface surfA:
In this example the moment constraint between the reference node and the coupling
nodes will be released in the 6-direction but will be enforced in the 4- and
5-directions. This provides a “revolute-like” rotation connection between the reference
node and the coupling nodes (see General Multi-Point Constraints).
Node-Based Surface
User-defined weight factors are used for node-based surfaces. The
cross-sectional areas specified in the surface definition are used as the
weight factors (see
Node-Based Surface Definition).
Element-Based Surface
For element-based surfaces the weight factors are calculated by
Abaqus.
The default weight distribution is based on the tributary surface area at each
coupling node, except for a surface along a shell edge where the weight
distribution is based on the tributary edge length. The procedure used to
calculate the default weight factors is designed to ensure that if a radius of
influence is prescribed, the default weight distribution varies smoothly with
the influence radius.
Calculating the Default Distributing Weight Factors
The procedure to calculate the distributing weight factors depends on
whether or not an influence radius is specified.
If no influence radius is specified, the entire surface is used in the
coupling definition. In this case all nodes located on the surface are included
in the coupling definition and the distributing weight factor at each coupling
node is equal to the tributary surface area.
If an influence radius is specified, the default distributing weight
factors at the coupling nodes are calculated as follows:
A “participation factor” is calculated for each surface facet. The
participation factor is defined below.
The tributary nodal area (or tributary edge length along a shell
edge) at each facet node is computed and is multiplied by the facet
participation factor.
The coupling node distributing weight factor is computed as the
sum of the corresponding facet nodal areas (calculated above) for all joining
facets.
Calculating the Facet Participation Factor
The participation factor defines the proportion of the facet's area that
contributes to the distributing weight factors when an influence radius is
specified. The participation factor varies between zero and one.
To define the participation factor, the distance of the facet node closest
to the reference node, ,
and the distance of the facet node farthest from the reference node,
,
are calculated.
If ,
where
is the influence radius, all facet nodes lie within the influence region; and a
participation factor of one is used.
If ,
none of the facet nodes lie within the influence region; and the participation
factor is set to zero.
If ,
the facet is partially inscribed in the influence region; and the facet is
assigned a participation factor equal to .
If all coupling nodes fall outside the influence radius (that is, for all facets), Abaqus selects all nodes belonging to the closest facets (as outlined under “Specifying a
region of influence”) and uses a participation factor equal to one.
Weighting Methods
You can modify the default weight distribution defined above. Various
weighting methods are provided that monotonically decrease with radial distance
from the reference node. For each case the default weight distribution that is
based on the tributary surface area (or tributary edge length along a shell
edge) is scaled by the weight factor .
If the weighting method is not specified, a uniform weighting method is used in
which all weight factors are equal to 1.0.
Linearly Decreasing Weight Distribution
A linearly decreasing weighting scheme
where
is the weight factor at coupling node i,
is the coupling node radial distance from the reference node, and
is the distance to the furthest coupling node.
Cloud nodes that have no stiffness cause numerical singularities in Abaqus/Standard analyses. You can guide Abaqus/Standard to provide proper management of such nodes. By default, Abaqus/Standard issues an error message. You can direct Abaqus/Standard to remove or allow nodes that are not attached to any user elements. You should keep
unattached nodes if they derive their stiffness by being main nodes to other nodes that
have stiffness.
Input File Usage
Use the following option to direct
Abaqus/Standard
to issue an error message (default):
The distributing coupling constraint can be specified with respect to a
local coordinate system instead of the global coordinate system (see
Orientations).
Figure 2
illustrates the use of a local coordinate system to release the moment
constraints between the reference node and the coupling nodes in the local 4-
and 6-directions, providing a “universal-like” rotation connection. In this
example a local rectangular coordinate system is defined that has its local
y-axis coincident with the global
z-axis. The moment constraint is specified in this local
coordinate system.
A distributing coupling or kinematic coupling constraint cannot be used
with axisymmetric elements with asymmetric deformation. This element type is
not compatible with coupling constraints.
If a distributing coupling or kinematic coupling constraint is used with
axisymmetric elements with twist, the constraint will not include the twist
degree of freedom 5 in those elements. It will involve only the displacement
degrees of freedom 1 and 2.