Problem description
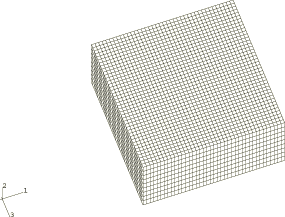
A deep indentation problem is solved for both axisymmetric and three-dimensional geometries, as shown in Figure 1. Each model consists of a rigid punch and a deformable blank. The punch has a semicircular nose section and a radius of 100 mm. The blank is modeled as a crushable foam with the elastic response given as follows (see Schluppkotten, 1999):
| 7.5 MPa (Young's modulus) and |
| 0.0 (elastic Poisson's ratio). |
The material parameters for the isotropic hardening are given as
| 1.0 (yield strength ratio) and |
| 0.0 (plastic Poisson's ratio), |
and the density is
| 60 kg/m3. |
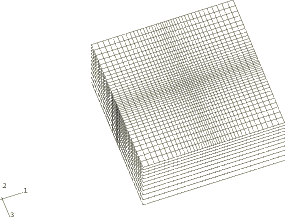
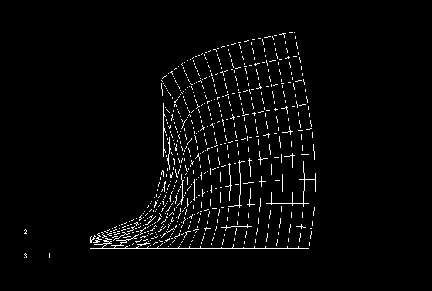
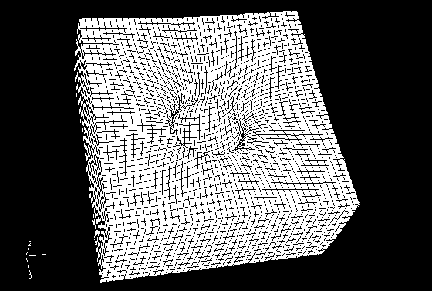
In both cases the punch is fully constrained except in the vertical direction. A deep indentation is made by moving the punch into the blank to a depth of 250 mm when adaptive meshing is used and to a depth of 285 mm when distortion control is used. The displacement of the punch is prescribed using a smooth-step amplitude so that a quasi-static response is generated.
Case 1: Axisymmetric model
The blank is meshed with CAX4R elements and measures 300 × 300 mm. The punch is modeled as an analytical rigid surface using a planar analytical surface in conjunction with a rigid body constraint. The bottom of the blank is constrained in the x- and z-directions, and symmetry boundary conditions are prescribed at r=0.
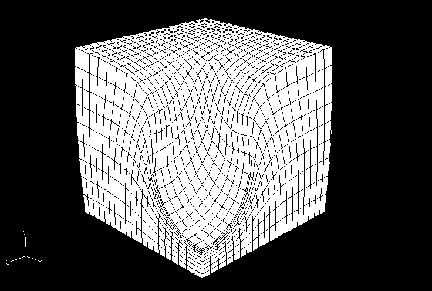
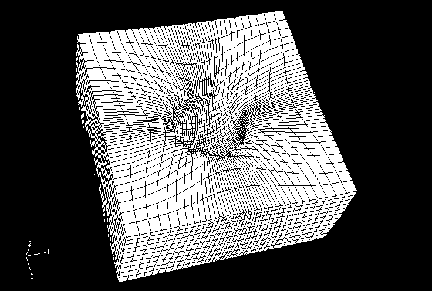
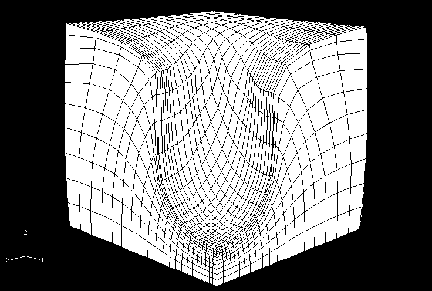
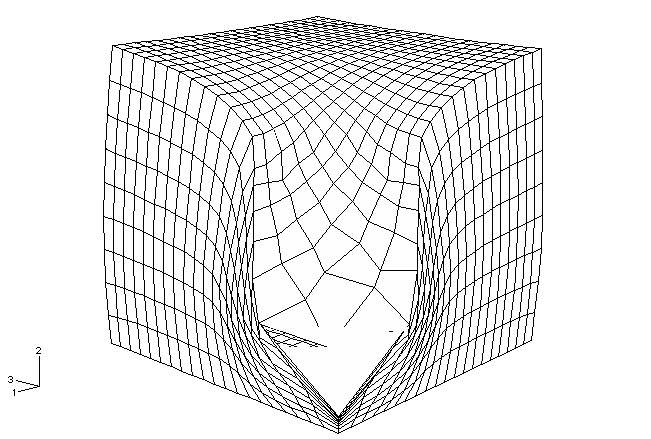
Case 2: Three-dimensional models
Two models are analyzed. For one model the blank is meshed uniformly, while for the other a graded mesh is used. For both models the blank is meshed with C3D8R elements and measures 600 × 300 × 600 mm. The punch is modeled as an analytical rigid surface using a three-dimensional surface of revolution in conjunction with a rigid body constraint. The bottom of the blank is fully constrained.