Geometry and model
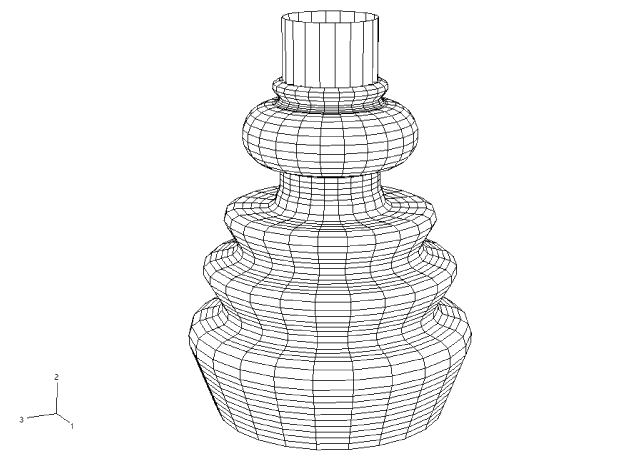
The boot seal with the internal shaft is shown in Figure 1. The corrugated shape of the boot seal tightly grips the steering shaft at one end, while the other end is fixed. The rubber seal is modeled with first-order, hybrid brick elements with two elements through the thickness using symmetric model generation. The seal has a nonuniform thickness varying from a minimum of 3.0 mm to a maximum of 4.75 mm at the fixed end. The internal shaft is considered to be rigid and is modeled as an analytical rigid surface; the radius of the shaft is 14 mm. The rigid body reference node is located precisely in the center of the constant velocity joint.
The rubber is modeled as a slightly compressible neo-Hookean (hyperelastic) material with =0.752 MPa and =0.026 MPa−1. For illustrative purposes an input file using the Marlow model is included; the model is defined using uniaxial test data generated by running a uniaxial test with the neo-Hookean model.
Contact is specified between the rigid shaft and the inner surface of the seal. Self-contact is specified on the inner and outer surfaces of the seal.