Application of bushing connectors in the analysis of a three-point
linkage
This example illustrates the use of detailed finite element
bushing models to calibrate the constitutive behavior of bushings (when
experimental data for a particular bushing design are not available) so that a
very inexpensive 2-node connector element representation of the bushing can be
used in subsequent analyses involving the bushing.
The approach shown in this example is effective in reducing
computational costs in assembly models while accurately capturing the
macroscopic response of the bushing. To demonstrate this approach, a
three-point linkage is simulated with connector elements used to model
bushings.
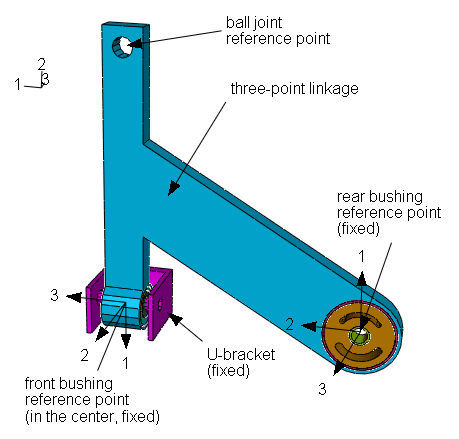
The geometry of the three-point linkage
(TPL) is shown in
Figure 1.
Since the main focus of this example is to illustrate modeling of the bushings,
a simplified representation of the TPL is
used. The TPL is connected to the subframe
(assumed fixed in space) via the front and rear bushings. A ball joint connects
the TPL to a wheel assembly (not shown). The
TPL is a steel shell structure and is modeled
as a linear elastic material with Young's modulus of 2.1 × 105 MPa,
Poisson's ratio of 0.3, and a density of 7.82 × 10–9
tonnes/mm3.
As shown in
Figure 2,
the rear bushing is a hollow cylinder with a rubber portion enclosed between
two (inner and outer) thin steel tubes. The rubber portion has two
symmetrically placed cutouts of different sizes, and it is rigidly bonded to
the steel tubes. The steel tubes are 2 mm thick and use the same material
properties as the TPL. The inner diameter of
this bushing is 28 mm, the outer diameter is 72 mm, and the axial length is 20
mm. The outer steel tube is connected to the
TPL using a kinematic coupling. The inner tube
is connected to a fixed node that represents a subframe using a distributed
coupling. The rubber is modeled as a second-order Ogden hyperelastic material
(Hyperelastic Behavior of Rubberlike Materials),
which may undergo nonlinear, finite deformation. The material parameters are
= 1.671,
= 9.0067,
= 2.154E−4,
= –4.86970,
= 1.0, and
= 1.0. The material density is 1.5 × 10–9 tonnes/mm3.
The geometry of the front bushing is shown in
Figure 3;
it consists of three noncoaxial steel tubes with two rubber parts between them.
The axial length of the bushing is 40 mm. The outer diameters of the three
tubes are 40 mm, 28 mm, and 16 mm. All three tubes have a thickness of 1 mm.
The outer steel tube is connected to the TPL
using a kinematic coupling. The inner tube is connected to a fixed node that
represents a U-shaped bracket. The front bushing uses the same rubber and steel
materials as those used for the rear bushing.
Models
To characterize the nonlinear constitutive behavior of the bushings, a
series of static analyses of the front bushing are performed in
Abaqus/Standard
and a series of quasi-static analyses of the rear bushing are performed in
Abaqus/Explicit.
Self-contact occurs in the rear bushing analyses due to severe deformation. In
all cases the reference node of the kinematic coupling connected to the outer
steel tube is held fixed in all degrees of freedom, while the second reference
node connected to the inner tube moves. For the calibration analyses, a BUSHING connector for which no constitutive behavior is defined is
placed between the two reference nodes. The use of a BUSHING connector to drive the deformation in these models is
desirable since this choice ensures appropriate kinematic and kinetic modeling
when the connector is used in other models (such as a full-system analysis).
Since the main interest is capturing the hyperelastic response of the rubber
bushings, both unidirectional and coupled multidirectional tests (simultaneous
deformations in up to three directions) are performed as summarized below.
To analyze several loading conditions, some connector components of relative
motion can be fixed and others can be prescribed nonzero motion. The reaction
forces and relative motions in the connector are saved as history output. The
data from these analyses are then used in a subsequent analysis of the
three-point linkage assembly to define nonlinear connector elasticity data.
Front bushing calibration tests
For the front bushing, static analyses are performed in
Abaqus/Standard
as follows:
Test
1_FB:
A translational motion is applied in the local 1-direction with all other
relative motions fixed. The motion is applied in the positive and negative
directions separately since the front bushing is not symmetric with respect to
the local 1-axis. The magnitude of this motion is 5 mm. The CRF1 vs. CU1 data generated from this analysis are used to define nonlinear
elasticity data for component 1.
Test
2_FB:
A translational motion is applied in the local 2-direction with all other
relative motions fixed. The magnitude of this motion is 5 mm. The CRF2 vs. CU2 data generated from this analysis are used to define nonlinear
elasticity data for component 2.
Test
3_FB:
A translational motion is applied in the local 3-direction with all other
relative motions fixed. The magnitude of this motion is 5 mm. The CRF3 vs. CU3 data generated from this analysis are used to define nonlinear
elasticity data for component 3.
Test
4_FB:
A 5° “bending” rotational motion about the local 1-direction is applied with
all other relative motions fixed. The CRM1 vs. CUR1 data generated from this analysis are used to define nonlinear
elasticity data for component 4.
Test
5_FB:
A 5° “bending” rotational motion about the local 2-direction is applied with
all other relative motions fixed. The CRM2 vs. CUR2 data generated from this analysis are used to define nonlinear
elasticity data for component 5.
Test
6_FB:
A 15° “twisting” rotational motion about the local 3-direction is applied
with all other relative motions fixed. The CRM3 vs. CUR3 data generated from this analysis are used to define nonlinear
elasticity data for component 6.
Test
7_FB:
A 5 mm displacement along the local 3-direction is applied about three
preloaded configurations. The test attempts to capture coupling effects in the
bushing after complex deformation is achieved. The preloaded configurations
are:
A twisting of 0º about the local 3-direction.
A twisting of 7.5º about the local 3-direction.
A twisting of 15º about the local 3-direction.
This test is a collection of three two-step analyses. In each of the
analyses a preload motion is applied in the first step, and the bending motion
is applied in the second step. Assuming a hyperelastic-like quasi-static
response in the bushing, for a given final coupled deformation, the deformation
path is not relevant. Hence, the prestress and the actual loading steps can be
run sequentially. The sets of CRF3 vs. CU3 data generated from the second steps of these analyses are
used to define elasticity data for component 3 using independent component 6.
Test
8_FB:
A 5° bending motion about the local 2-direction is applied about three
preloaded configurations. The test attempts to capture coupling effects in the
bushing after complex deformation is achieved. The preloaded configurations
are:
A twisting of 0º about the local 3-direction.
A twisting of 7.5º about the local 3-direction.
A twisting of 15º about the local 3-direction.
This test is a collection of three two-step analyses. In each of the
analyses a preload motion is applied in the first step, and the bending motion
is applied in the second step. Assuming a hyperelastic-like quasi-static
response in the bushing, the deformation path is not relevant for a given final
coupled deformation. Hence, the prestress and the actual loading steps can be
run sequentially. The sets of CRM2 vs. CUR2 data generated from the second steps of these analyses are
used to define elasticity data for component 5 using independent component 6.
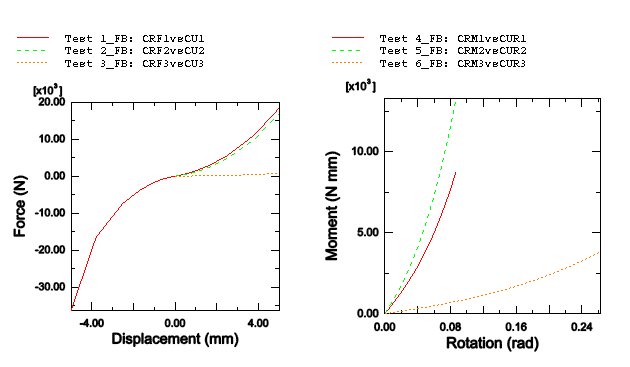
Force vs. displacement and moment vs. rotation curves are shown in
Figure 4
for the cases without preload (Tests 1_FB to
6_FB) and in
Figure 5
for the cases with preload (Tests 7_FB and
8_FB).
Script files were generated to automatically create the input files and run
the analyses for the uncoupled tests and each of the coupled tests. These
scripts essentially build up a CROSS design
parametric study for the uncoupled tests and a
MESH design for the coupled tests (see
Scripting Parametric Studies).
Rear bushing calibration tests
For the rear bushing, quasi-static analyses are performed in
Abaqus/Explicit
as follows:
Test
1_RB:
A translational motion is applied in the local 1-direction with all other
relative motions fixed. The magnitude of this motion is 10 mm. The CRF1 vs. CU1 data generated from this analysis are used to define nonlinear
elasticity data for component 1.
Test
2_RB:
A translational motion is applied in the local 2-direction with all other
relative motions fixed. The magnitude of this motion is 5 mm. The CRF2 vs. CU2 data generated from this analysis are used to define nonlinear
elasticity data for component 2.
Test
3_RB:
A translational motion is applied in the local 3-direction with all other
relative motions fixed. The magnitude of this motion is 5 mm. The CRF3 vs. CU3 data generated from this analysis are used to define nonlinear
elasticity data for component 3.
Test
4_RB:
A 5° “bending” rotational motion about the local 1-direction is applied with
all other relative motions fixed. The CRM1 vs. CUR1 data generated from this analysis are used to define nonlinear
elasticity data for component 4.
Test
5_RB:
A 15° “bending” rotational motion about the local 2-direction is applied
with all other relative motions fixed. The CRM2 vs. CUR2 data generated from this analysis are used to define nonlinear
elasticity data for component 5.
Test
6_RB:
A 5° “twisting” rotational motion about the local 3-direction is applied
with all other relative motions fixed. The CRM3 vs. CUR3 data generated from this analysis are used to define nonlinear
elasticity data for component 6.
Test
7_RB:
A 10 mm displacement in the local 1-direction is applied about several
preloaded configurations. The displacement is applied in the positive and
negative directions separately since the rear bushing is not symmetric with
respect to the local 1-axis. The test attempts to capture coupling effects in
the bushing after complex deformation is achieved. The preloaded configurations
are a combination of a displacement in the local 2-direction and a rotation
about the local 2-direction for which the following design points were
selected:
A displacement of 0.0 mm in the local 2-direction.
A displacement of 2.5 mm in the local 2-direction.
A displacement of 5.0 mm in the local 2-direction.
A 0° “bending” rotational motion about the local 2-direction.
A 7.5° “bending” rotational motion about the local 2-direction.
A 15° “bending” rotational motion about the local 2-direction.
This test is a collection of 18 two-step analyses. In each of the analyses
two preload motions are applied in the first step, and the translational motion
in the local 1-direction is applied in the second step. Assuming a
hyperelastic-like quasi-static response in the bushing, the deformation path is
not relevant for a given final coupled deformation. Hence, the prestress and
the actual loading steps can be run sequentially. The sets of CRF1 vs. CU1 data generated from the second steps of these analyses are
used to define elasticity data for component 1 using independent components 2
and 5.
Test
8_RB:
A 5 mm displacement in the local 2-direction is applied about several
preloaded configurations. The test attempts to capture coupling effects in the
bushing after complex deformation is achieved. The preloaded configurations are
a combination of a displacement in the local 1-direction (positive and negative
loadings are considered separately due to asymmetry) and a rotation about the
local 2-direction, for which the following design points were selected:
A displacement of –10.0 mm in the local 1-direction.
A displacement of –5.0 mm in the local 1-direction.
A displacement of 0.0 mm in the local 1-direction.
A displacement of 5.0 mm in the local 1-direction.
A displacement of 10.0 mm in the local 1-direction.
A 0° “bending” rotational motion about the local 2-direction.
A 7.5° “bending” rotational motion about the local 2-direction.
A 15° “bending” rotational motion about the local 2-direction.
This test is a collection of 15 two-step analyses. In each of the analyses
two preload motions are applied in the first step, and the translational motion
in the local 2-direction is applied in the second step. Assuming a
hyperelastic-like quasi-static response in the bushing, the deformation path is
not relevant for a given final coupled deformation. Hence, the prestress and
the actual loading steps can be run sequentially. The sets of CRF2 vs.CU2 data generated from the second steps of these analyses are
used to define elasticity data for component 2 using independent components 1
and 5.
Force vs. displacement and moment vs. rotation curves are shown in
Figure 6
for the cases without preload (Tests 1_RB to
6_RB).
Figure 7
shows a comparison of the force vs. displacement with no preload and with the
most extreme preload conditions for Tests 7_RB
and 8_RB.
Script files were generated to automatically create the input files and run
the analyses for the uncoupled tests and each of the coupled tests. As in the
case of the front bushing, these scripts essentially build up a
CROSS design parametric study for the
uncoupled tests and a MESH design for the
coupled tests. Furthermore, Python files were created to automatically gather
the force vs. displacement data points and to create corresponding report
files.
Additional comments on calibration tests
Since each bushing has several symmetry planes, the tests above (unless
specified otherwise) are conducted only for positive relative motions when the
responses in the opposite directions are symmetric. Therefore, nonlinear
elasticity data are generated only for positive relative motions for those
cases. Nonlinear elasticity is defined for negative relative motions by
symmetrizing the elasticity data with respect to the origin.
The analyses chosen above are deemed appropriate to generate the necessary
and complete nonlinear elasticity data to enable BUSHING connectors to represent the front and rear bushings in
subsequent analyses of the TPL. The
quasi-static analyses were run over sufficiently large motion ranges to cover
the motion range expected in the analysis where the BUSHING connector is used. Nonlinear elasticity data are generated in
all six relative uncoupled directions in the BUSHING connector. For the front bushing, elasticity data are
generated (Tests 7_FB and
8_FB) for two coupled deformation modes
(involving two components of local motion each) that were thought to be the
dominant coupling modes in the subsequent analysis where the BUSHING connectors are used. For the rear bushing, elasticity data are
generated (Tests 7_RB and
8_RB) for two coupled deformation modes
(involving three components of local motion each) that were thought to be the
dominant coupling modes in the subsequent analysis where the BUSHING connectors are used. In general, the number and complexity of
coupled deformation tests can be increased to match any particular modeling
needs.
TPL models
Three different models are created for the analysis of the three-point
linkage system: a fully meshed model, a bushing connector model, and a
substructure model. They all model the TPL
using the front and rear bushings to connect to the subframe (not modeled) that
is assumed to be fixed in space. Loads are applied to a reference point where
the ball joint is attached to model loads that the wheel assembly would exert
on the TPL. The constraint imposed by the
fixed subframe is modeled in all three cases by constraining the motion of the
inner cylinder distributed coupling reference node in all six degrees of
freedom.
In the fully meshed model the linkage itself is modeled using shell
elements, while the front and rear bushings are modeled using continuum
elements. The front bushing is connected to the reference node of a U-bracket
that is modeled as a rigid body (see
Figure 1).
The rigid body reference node of the U-bracket is held fixed in all six degrees
of freedom.
In the bushing connector model the bushings in the fully meshed model are
replaced with BUSHING connectors. The constitutive data for the connectors are
obtained from the series of tests described above. The front bushing is
connected to the reference node of a U-bracket that is modeled as a rigid body
(see
Figure 1).
The rigid body reference node of the U-bracket is held fixed in all six degrees
of freedom.
In the substructure model the three-point linkage is modeled with a
substructure, and the bushings are modeled with connector elements as defined
in the bushing connector model. For clarity, the U-bracket is not represented
in the substructure model since it is considered to be rigid and fixed. The
rear bushing inner cylinder is connected to the subframe via a large bolt.
Two load cases are applied in all three models:
Load case 1:
A geometrically nonlinear, single-step, static analysis is performed where a
concentrated force of 250 N is applied at the ball joint reference node in the
negative global 1-direction. The analysis models a horizontal load at the ball
joint.
Load case
2:
A geometrically nonlinear, two-step, static analysis is performed. In the
first step the TPL is lifted by 10º about the
global 1-direction by applying a displacement boundary condition of 20 mm to
the ball joint reference node in the negative global 3-direction. In the second
step a concentrated force of 250 N is applied at the ball joint reference node
in the negative global 1-direction. The analysis models a horizontal load on
the ball joint as the wheel and, hence, the ball joint go over a bump.
Results and discussion
It can be seen from the results of Tests
7_FB and 8_FB
(Figure 5)
that the front bushing behavior in both the local 3-direction and about the
local 2-direction is affected significantly by the amount of preload about the
local 3-direction. For the rear bushing it can be seen from the results of
Tests 7_RB and
8_RB (Figure 7)
that the behavior in the local 1-direction and especially the behavior in the
local 2-direction are affected significantly by the amount of the combined
preload (in the local 2-direction and about the local 2-direction for Test
7_RB, and in the local 1-direction and about
the local 2-direction for Test 8_RB).
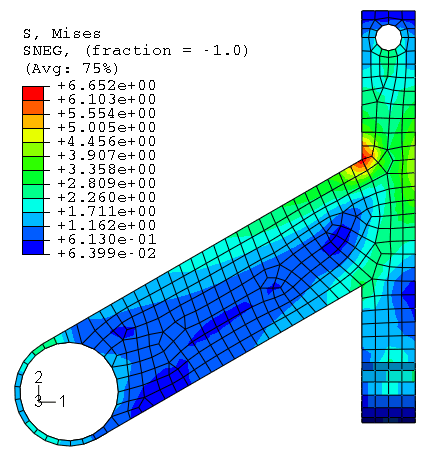
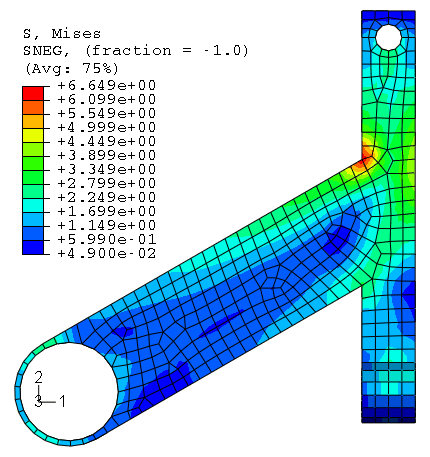
The Mises stresses in the TPL calculated
for each of the three modeling approaches are very similar, as shown in
Figure 8,
Figure 9,
and
Figure 10.
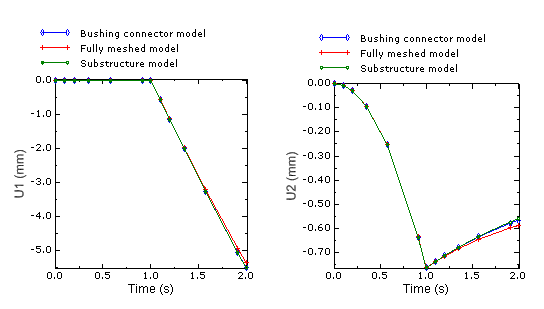
In addition, displacement histories at the ball joint (where the loading was
applied) show very good agreement between the three models (Figure 11).
As expected, the bushing connector model analysis and the substructure model
analysis produced identical displacements at the ball joint. When compared with
the fully meshed model, the differences for the displacement histories in both
directions are 4% toward the end of the curves.
The main motivation to use the BUSHING connector in this and similar applications is to reduce the
complexity of the models and the computation time. In this
TPL analysis the fully meshed model analysis
takes approximately 50 times longer than the analysis that uses connectors to
model the bushings. Furthermore, the substructure model analysis completes in
about one-eighth of the time required for the analysis that uses connectors to
model the bushings, approximately 400 times faster than the original fully
meshed model.
In summary, this example demonstrates significant improvement in analysis
efficiency when bushings are modeled with pre-calibrated BUSHING connectors or substructures without sacrificing accuracy.
Figure 1. Three-point linkage (TPL)
assembly. Figure 2. Rear bushing geometry. Figure 3. Front bushing geometry. Figure 4. Front bushing coupled force vs. displacement and moment vs. rotation
curves without preload. Figure 5. Front bushing coupled force vs. displacement and moment vs. rotation
curves with preload. Figure 6. Rear bushing force vs. displacement and moment vs. rotation curves
without preload. Figure 7. Comparison of rear bushing coupled force vs. displacement for Tests
7_RB and
8_RB. Figure 8. Mises stresses in the TPL for the
fully meshed model (Load case 2). Figure 9. Mises stresses in the TPL for the
bushing connector model (Load case 2). Figure 10. Mises stresses in the TPL for the
substructure model (Load case 2). Figure 11. Comparison of displacements at the ball joint reference node (Load
case 2).