Application description
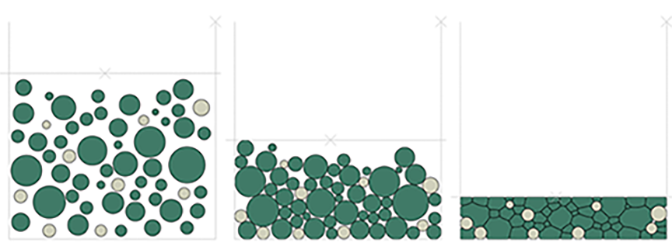
In this example a simple U-shaped container is simulated using rigid elements (R2D2), and it is initially filled with two-dimensional cylinders modeled as plane stress elements (CPS3 and CPS4R). A plane stress state approximates relatively thin bodies, so this model may be representative of short cylinders. The model could be converted to approximating the response for long cylinders by switching to the corresponding plane strain element types (CPE3 and CPE4R).
In the second part of the analysis, the deformable cylinders are highly compressed by a horizontal rigid lid.