Geometry and model
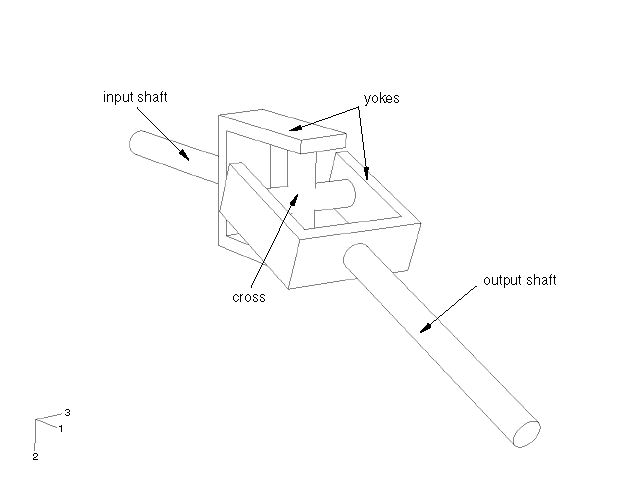
Driveshaft mechanisms are important components of motor vehicles. These mechanisms often contain universal joints that are used to carry motion from one shaft to another where the two shafts are not perfectly aligned. A typical universal joint assembly is shown in Figure 1. The joint consists of a cross that carries needle roller bearings at the four extremities. The bearing cups are attached to yokes, two on the input shaft and two on the output shaft. The universal joint is not a constant velocity joint. If the input and output shafts are not aligned, the uniform rotation of the input shaft will result in a nonuniform rotation of the output shaft. When the input shaft is rotated at constant velocity, the output shaft will accelerate and decelerate twice per revolution (a pulsation effect).
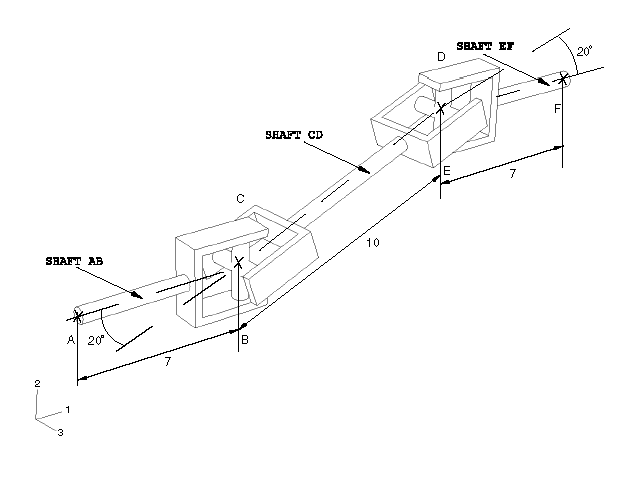
The driveshaft mechanism in this example problem consists of three shafts, SHAFT AB (the input shaft), SHAFT CD (the center shaft), and SHAFT EF (the output shaft). SHAFT AB is connected to SHAFT CD through a universal joint that connects B and C. SHAFT CD is connected to SHAFT EF through a universal joint that connects D and E. B31 beam elements are used to model the shafts. SHAFT AB and SHAFT EF have a length of 7 units each, and SHAFT CD is 10 units long. SHAFT AB and SHAFT EF are coplanar and parallel to each other. SHAFT CD is also coplanar to SHAFT AB and SHAFT EF but is inclined to SHAFT AB and SHAFT EF at an angle of 20 degrees. SHAFT AB, SHAFT CD, and SHAFT EF are circular in cross-section; and the radius of their cross-section is 0.1 units. The universal joints connecting B and C and connecting D and E are modeled using CONN3D2 elements.
The variation of angular motion between the input and output shafts can be avoided. The pulsation effect between the input shaft and the center shaft can be compensated entirely by the pulsation effect between the center shaft and the output shaft if the universal joints are oriented properly with respect to each other. A sufficient condition for the input/output velocity ratio to be constant is that the directions normal to the crosses of the universal joints be colinear. The configuration of the shafts is illustrated in Figure 2. In this figure we can see that the crosses lie in parallel planes. This will guarantee a constant input/output velocity ratio.