Gears are widely used in a variety of machinery to transfer torque
(rotational motion) from one shaft to another shaft and to act as a means to
change the torque (rotational speed) acting on a shaft. Three types of gear
assemblies (spur gear assembly, rack and pinion mechanism, and screw gear
assembly) are studied in this example with a focus on the proper transmission
of torque and rotational motion between the gears. The units used are
millimeters-tonnes-seconds.
Geometry
Spur gears
A spur gear assembly consists of a driving gear (labeled
Pinion) with input torque acting on it and a
driven gear (labeled Gear) that receives the
torque from the pinion, as shown in
Figure 1.
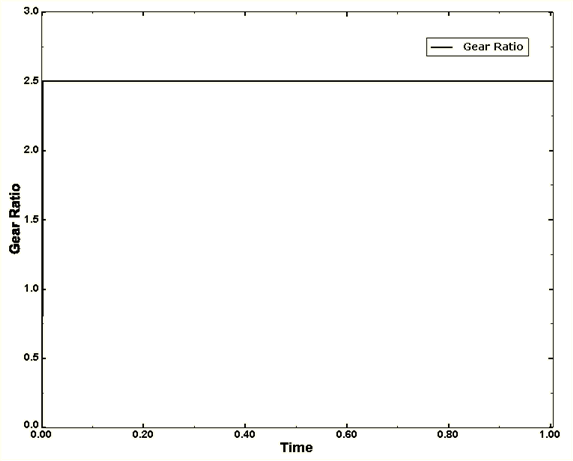
In this example the gear ratio is chosen as 2.5; i.e., the gear has 2.5 times
more teeth than the pinion and, hence, it rotates 2.5 times slower than the
pinion. To measure the power transmission in the gear system, a linear
torsional spring is placed on each shaft such that the ratio of their elastic
constants is the square of the ratio of the gear radius on the respective
shaft. The whole gear assembly is mounted on a single rigid body whose
reference node is constrained to prevent rigid body motion. The pitch circle
radius of the pinion and the gear is 1.04573 units and 2.61433 units,
respectively, as marked by the position of node 2 in
Figure 1.
The elastic constant of the torsional spring on the pinion shaft is chosen as 1
unit while that on the gear shaft, as calculated from the gear ratio, is 6.25
units.
Rack and
pinion
A rack and pinion mechanism is a special case of the spur gear assembly with
one of the gears having an infinite radius. The mechanism consists of a
spinning pinion pulling the rack toward itself, as shown in
Figure 2.
A groove is provided to guide the movement of the rack. The whole rack and
pinion assembly is mounted on a rigid body whose reference node is constrained
to prevent any rigid body motion. The pitch circle radius of the pinion is 2.5
units.
Screw gear and
housing
A screw gear mechanism is similar to a rack and pinion mechanism except that
the translational motion takes place along the axis of rotation of the gear, as
shown in
Figure 3.
As in the case of the rack and pinion arrangement, a slot guides the direction
of the motion of the screw. The screw gear and housing assembly is mounted on a
rigid body whose reference node is constrained to prevent any rigid body
motion. The motion involves turning the screw one complete revolution as it
runs along the grooves of the screw thread of a fixed housing. The screw has a
radius of 1.5 units and a pitch of 2 units.
Abaqus modeling approaches and simulation techniques
This example illustrates the use of connectors for modeling gear assemblies
in
Abaqus/Explicit.
The focus in this example is purely on the kinematics of gears without the
consideration of gear-teeth forces.
Summary of analysis cases
Case 1: Spur gears
A rotating pinion driving a gear.
Case 2: Rack and pinion
A rotating pinion pulling a rack guided in
a slot.
Case 3: Screw gear
A rotating screw moving through a groove
in a housing.
Mesh design
All three cases of gear assemblies use CONN3D2 elements with the section behavior defined in detail in the
following sections.
Case 1: Spur gears
This case illustrates using connectors to model the kinematics of a spur
gear assembly.
Mesh design
Each spur gear is modeled using one CONN3D2 element with connection type HINGE and one CONN3D2 element with connection type FLOW-CONVERTER.
Materials
The HINGE of the pinion has a torsional stiffness of 1 unit, and the HINGE of the gear has a torsional stiffness of 6.25 units.
Boundary conditions
The first nodes of both HINGEs are fixed. The second node of the HINGE of the pinion is driven by 18.85 radians.
Interactions
As shown in
Figure 1,
the pinion and gear are each modeled with a HINGE and a FLOW-CONVERTER sharing a node (nodes 1 and 3, respectively). Nodes 1 and 3 of
HINGEs HG1 and
HG2, respectively, are free to rotate, whereas
their second nodes (node 4 and 6, respectively) form a rigid body along with
node 5 (reference node). This rigid body has all of its degrees of freedom
fixed to prevent overall rigid body motion of the gear system.
The second node of FLOW-CONVERTERs FC1 and
FC2 is common (node 2) with all of its rotations
fixed. Any relative rotation in HINGEHG1 causes material flow at node
2 of FLOW-CONVERTERFC1. The gear mechanism formed
by HINGEHG2 and FLOW-CONVERTERFC2 mirrors the pinion mechanism
formed by FLOW-CONVERTERFC1 and HINGEHG1. Thus, any material flow at
common node 2 of FLOW-CONVERTERFC2 results in a relative
rotational motion between the two nodes of HINGEHG2.
The gear ratio of 2.5 is maintained by defining the scaling factor β (with
proper sign) in FLOW-CONVERTERs FC1 and
FC2; for this case, the scaling factors are 1.0
and −0.4, respectively. The display bodies of the gear and pinion have
reference nodes 10 and 11, respectively, that form a rigid body with the
respective unconstrained nodes of HINGEs HG1 and
HG2.
Case 2: Rack and pinion
This case illustrates using connectors to model the kinematics of a rack and
pinion mechanism.
Mesh design
The pinion is modeled using one CONN3D2 element with connection type HINGE and one CONN3D2 element with connection type FLOW-CONVERTER. The rack is modeled using one CONN3D2 element with connection type SLIPRING. The groove in which the rack moves is modeled using one CONN3D2 element with connection type TRANSLATOR.
Materials
Both the HINGE and the SLIPRING are defined as rigid elastic.
Boundary conditions
The first nodes of the HINGE and TRANSLATOR are fixed. Degree of freedom 10 of the common node of the SLIPRING and TRANSLATOR is also fixed. The second node of the HINGE of the pinion is driven by 6.28 radians.
Interactions
The rack and pinion mechanism, as shown in
Figure 2,
is modeled similarly to the spur gears described in Case 1. The pinion is
modeled with HINGEHG (nodes 1 and 6) and FLOW-CONVERTERFC (nodes 1 and 2) that share a
common node (node 1). The rack is modeled with a SLIPRINGSR (nodes 2 and 3) and TRANSLATORTR (nodes 4 and 3) that is used
to guide the motion of SLIPRINGSR. SLIPRINGSR and FLOW-CONVERTERFC share a common node (node 2).
Nodes 2, 4, and 6 are part of a rigid body with reference node 5 that is
constrained to prevent any rigid body motion of the rack and pinion system. A
fixed boundary condition on degree of freedom 10 is imposed at node 3 of SLIPRINGSR to prevent any material flow
past this node. Any relative rotation between nodes 1 and 6 of HINGEHG results in material flow at
node 2 of FLOW-CONVERTERFC. This material flow at node 2
results in tension in the adjoining SLIPRINGSR that drives the rack.
The relation between the translational motion of the rack and the rotational
motion of the pinion is maintained by defining the scaling factor β (with
proper sign) of FLOW-CONVERTERFC; for this case, the scaling
factor is 0.4. As mentioned before, the motion of the rack occurs parallel to
the axis of the TRANSLATORTR, and it can be measured via
the connector displacement of TRANSLATORTR. In this example available
component 4 in HINGEHG and available component 1 in SLIPRINGSR are both defined as rigid
elastic. The display bodies of the rack and pinion have reference nodes 10 and
11, respectively, that form a rigid body with the respective unconstrained
nodes of SLIPRINGSR and HINGEHG.
Case 3: Screw gear
This case illustrates using connectors to model the kinematics of a screw
gear and housing assembly.
Mesh design
The screw is modeled using one CONN3D2 element with connection type HINGE, one CONN3D2 element with connection type FLOW-CONVERTER, and one CONN3D2 element with connection type SLIPRING. The groove in which the screw moves is modeled using a CONN3D2 element with connection type TRANSLATOR.
Materials
Both the HINGE and the SLIPRING are defined as rigid elastic.
Boundary conditions
The first nodes of the TRANSLATOR are fixed. Degree of freedom 10 of the common node of the SLIPRING and TRANSLATOR is also fixed. The second node of the HINGE of the screw is driven by 20 radians.
Interactions
The screw gear system, as shown in
Figure 3,
is modeled similarly to the rack and pinion system described in Case 2. The
screw is modeled with HINGEHG (nodes 6 and 1), FLOW-CONVERTERFC (nodes 1 and 2), and SLIPRINGSR (nodes 2 and 3). The housing
is modeled with TRANSLATORTR (nodes 4 and 3). HINGEHG and FLOW-CONVERTERFC share a common node (node 1).
SLIPRINGSR and FLOW-CONVERTERFC share node 2.
Nodes 2, 4, and 11 are part of a rigid body with reference node 5 that is
constrained to prevent any rigid body motion of the housing. Material flow at
node 3 of the SLIPRING is prevented via a fixed boundary condition on degree of
freedom 10. Similar to the rack and pinion mechanism, the relative rotation
between nodes 1 and 6 of HINGEHG results in material flow at
node 2 of FLOW-CONVERTERFC. This material flow at node 2
causes tension in the belt of SLIPRINGSR, resulting in a translational
displacement of node 3. Nodes 3 and 6 are tied together as a rigid body and,
hence, the translational motion of node 3 results in the linear motion of the
screw. The rotational motion of the screw is identical to the rotational motion
of node 1.
The scaling factor β of FLOW-CONVERTERFC is defined to scale the
rotational motion of node 1 in relation to its translational motion; for this
case, the scaling factor is −3.14. As in the case of the rack and pinion
mechanism, TRANSLATORTR guides the direction of the
motion of the screw. Available component 1 in SLIPRINGSR is defined as rigid elastic.
The display bodies of the screw and the housing have reference nodes 10 and 11,
respectively, that form a rigid body with the respective unconstrained nodes of
HINGEHG and SLIPRINGSR.
Discussion of results and comparison of cases
Case 1: Spur gears
The pinion shaft is given an angular displacement of 18.85 radians by
defining connector motion in HINGEHG1. The final angular
displacement of the gear shaft is measured to be 7.54 radians, with the gear
ratio holding at 2.5 throughout the analysis duration, as shown in
Figure 4.
The ratio of the input to output power, which is calculated by taking the
product of connector moment CTM1 and connector motion CUR1 of the respective HINGEs, is also found to be constant.
Case 2: Rack and
pinion
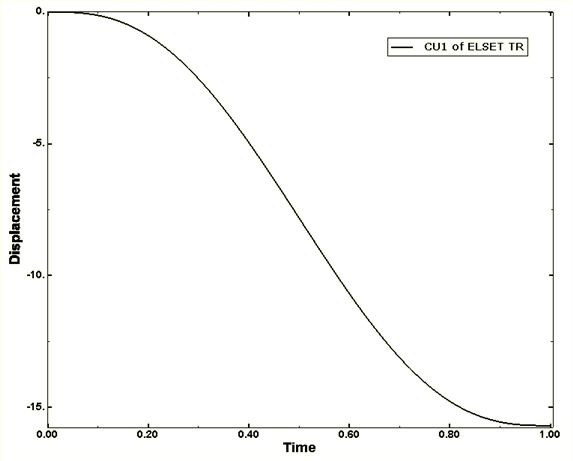
The pinion is rotated one complete revolution by defining connector motion
in HINGEHG. The rack moves 15.7 units,
measured by CU1 of TRANSLATORTR in
Figure 5.
This distance is the same as the circumference of the pitch circle of the
pinion.
Case 3: Screw
gear
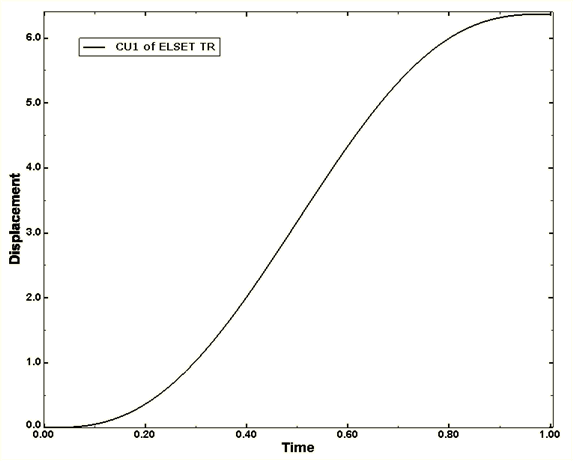
The screw is given an angular rotation of 20 radians by defining connector
motion in HINGEHG. The screw moves 6.37 units,
measured by CU1 of TRANSLATORTR as shown in
Figure 6.
Figure 1. Spur gear assembly. Figure 2. Rack and pinion assembly. Figure 3. Screw gear assembly. Figure 4. Ratio of angular displacement of the pinion (CUR1 of HINGEHG1) to that of the gear (CUR1 of HINGEHG2). Figure 5. Displacement of the rack (CU1 of TRANSLATORTR). Figure 6. Displacement of the screw (CU1 of TRANSLATORTR).